Решение представляет собой шагающее транспортное средство повышенной проходимости с движителями-ногами. Может быть использовано для преодоления препятствий на сильно пересеченной местности, в условиях чрезвычайных ситуаций.
Преодоление препятствий - важная задача, которую необходимо решать при перемещении по пересеченной местности, по зонам разрушений и бедствий.
Существующие транспортные средства - автомобили, гусеничные машины, обычные шагающие машины имеют серьезные ограничения возможностей в преодолении препятствий (см. книгу - М.Б. Игнатьев «Кибернетическая картина мира», Санкт-Петербург, 2010, 150 стр.). При этом использование самолетов и вертолетов не всегда возможно и целесообразно. Предлагаемое устройство существенно пополняет арсенал систем для преодоления препятствий.
Известен патент РФ на изобретение №2489293 [1].
Изобретение относится к преобразуемому транспортирующему устройству, приспосабливаемому к различным типам местности и к преодолению различных препятствий. Преобразуемое транспортирующее устройство содержит колесо и систему рычагов с роликами на конце. Система рычагов выполнена в виде кривошипно-ползунного механизма ломающегося подкоса. В кривошипно-ползунном механизме ломающегося подкоса звенья-рычаги с несущими роликами на конце вращаются вокруг осей, шарнирно связанных с валом колеса. Шток поршня имеет свободу осевого перемещения по валу колеса, обеспечивая при необходимости положение роликов в контакте с периферией колеса.
Упомянутое изобретение имеет ограничение по проходимости, не обеспечивает достаточной адаптивности к неровной поверхности грунта.
Известен патент РФ на изобретение №2368529 [2].
Изобретение относится к шагающим транспортным средствам повышенной проходимости. Шагающая опора содержит корпус с побортно установленными на нем шагающими движителями курсового движения. Шагающие движители курсового движения выполнены в виде плоских шарнирных четырехзвенников лямбдаобразного типа и содержат криволинейные опоры, которые снабжены лыжеобразными башмаками. Силовой привод курсового движения кинематически связан с шагающими движителями и содержит систему преодоления локальных препятствий, которая включает в себя передние шагающие движители курсового движения циклового типа и механизм смены направления движения шагающей опоры. Последний содержит поворотную платформу, установленную в горизонтальной плоскости под корпусом шагающей опоры и оборудованную поворотным реверсивным силовым приводом. Побортно установлены шагающие движители ортогонального типа, выполненные в виде попарно сгруппированных ног в виде гидроцилиндров с независимым гидроприводом. Концы сгруппированных ног с одной стороны соединены непосредственно с поворотной платформой, один жестко, второй шарнирно, а с другой стороны шарнирно связаны с проушинами общего для каждой пары ног дополнительного башмака лыжеобразной формы. Достигается возможность маневрирования и преодоления локальных препятствий с минимальными энергозатратами.
Изобретение по патенту №2368529 является наиболее близким решением относительно заявляемого, так как представляет собой шагающее транспортное средство повышенной проходимости с движителями-ногами.
Техническим результатом предлагаемого устройства является обеспечение адаптивности к неровной поверхности грунта за счет того, что если одна из ног поднята для поиска точки опоры, то три других должны быть расположены так, чтобы проекция центра тяжести системы находилась в треугольнике устойчивости.
Предлагается устройство для преодоления препятствий, представляющее собой шагающее транспортное средство повышенной проходимости, характеризующееся тем, что содержит трубу, на которой смонтированы три платформы, две платформы неподвижно закреплены на трубе, одна может перемещаться по трубе, каждая из платформ снабжена четырьмя механическими ногами с автоматическим приводом и датчиками - визуальными и тактильными и датчиками положения суставов ног для обеспечения устойчивого положения ног на неровной поверхности с возможностью адаптации и изменения положения ног путем переступания, причем ноги необходимы для обеспечения устойчивости, и если одна из ног поднята для поиска точки опоры, то три других должны быть расположены так, чтобы проекция центра тяжести системы находилась в треугольнике устойчивости.
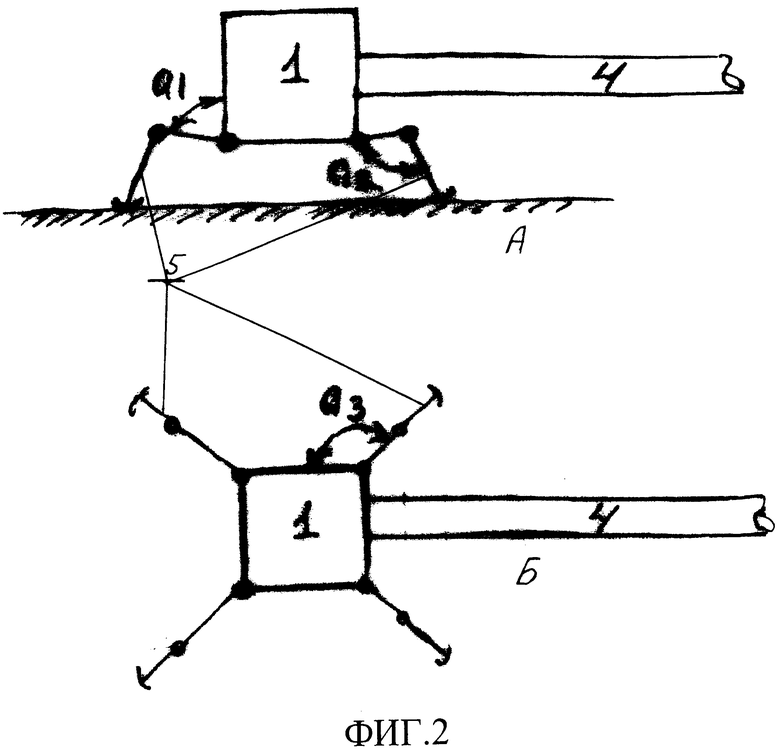
Устройство характеризуется также тем, что каждая из ног имеет три степени свободы с возможностью поворота суставов на углы а1, а2, а3 посредством приводов, управляемых от бортового вычислительного устройства, которое обрабатывает информацию от датчиков, расположенных на опорных ногах, и визуальную информацию с видеокамер, которые следят за преодолеваемым препятствием и окружающей местностью.
Устройство иллюстрируется на фигурах: фиг.1 - схема перемещения, фиг.2 - вид сбоку (А) и вид сверху опорных ног (Б).
Датчики и бортовое вычислительное устройство не показаны на фигурах.
Устройство содержит трубу 4, на которой смонтированы три платформы (фиг.1). Платформы 1 и 2 неподвижно закреплены на трубе, платформа 3 может перемещаться по трубе. Каждая из платформ снабжена четырьмя механическими ногами 5 с автоматическим приводом (привод может быть электромеханическим, гидравлическим или иным) и датчиками - визуальными и тактильными и датчиками положения суставов ног для обеспечения устойчивого положения ног на неровной поверхности с возможностью адаптации и изменения положения ног путем переступания. Четыре ноги 5 необходимы для обеспечения устойчивости - если одна из ног поднята для поиска точки опоры, то три других должны быть расположены так, чтобы проекция центра тяжести системы находилась в треугольнике устойчивости.
Устройство действует следующим образом (фиг.1).
Устройство в положении А находится около препятствия, например рва, при этом крайние платформы опираются на грунт, ноги подвижной платформы подогнуты. Второе положение Б - подвижная платформа переместилась в краю препятствия, ее ноги 5 оперлись на грунт, а ноги 5 крайних платформ подогнуты - в этом положении осуществляется перемещение трубы через подвижную платформу, делается шаг через препятствие. Третье положение - ноги 5 первой и третьей платформ опираются на грунт, ноги подвижной платформы подгибаются, и подвижная платформа перемещается по трубе в положение В. Далее в положении Г ноги 5 подвижной платформы опираются на грунт, а ноги 5 платформ 1 и 3 поджаты, и система готова сделать следующий шаг и т.д.
Весо-габаритные характеристики устройства подбираются в зависимости от размеров преодолеваемых препятствий и характеристик перемещаемого груза, который размещается на подвижной платформе.
На фиг.2 показана платформа 1 с четырьмя ногами 5, каждая из которых имеет три степени свободы - возможность поворота суставов на углы а1, а2, а3, что обеспечивается с помощью приводов, управляемых от бортового вычислительного устройства, которое обрабатывает информацию от датчиков, расположенных на ногах, и визуальную информацию с видеокамер, которые следят за преодолеваемым препятствием и окружающей местностью. Положение каждой ноги характеризуется тремя углами: а1 - верхний угол, а2 - нижний угол, а3 - угол поворота плоскости ноги 5.
Аналогичным образом оборудованы ногами 5 платформы 2 и 3, что обеспечивает адаптивность к неровной поверхности грунта.
Преимуществом предлагаемого устройства является повышенная устойчивость транспортного средства наряду с переносом значительных грузов.
Источники информации
1. Патент РФ №2489293, ПРЕОБРАЗУЕМОЕ ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО, МПК В62В 9/02, B62D 55/075, заявл. 11.05.2012.
2. Патент РФ №2368529, ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ, МПК B62D 57/032, заявл. 20.05.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2174085C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ С ШАГАЮЩИМИ ЗВЕНЬЯМИ | 2004 |
|
RU2362703C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| Универсальная самоходная платформа | 2018 |
|
RU2702260C1 |
Изобретение относится к шагающим транспортным средствам повышенной проходимости с движителями-ногами. Шагающее транспортное средство повышенной проходимости с движителями-ногами содержит трубу, на которой смонтированы три платформы. Две платформы неподвижно закреплены на трубе, а одна может перемещаться по трубе. Каждая из платформ снабжена четырьмя механическими ногами с автоматическим приводом и датчиками - визуальными и тактильными и датчиками положения суставов ног для обеспечения устойчивого положения ног на неровной поверхности с возможностью адаптации и изменения положения ног путем переступания. Ноги необходимы для обеспечения устойчивости. Если одна из ног поднята для поиска точки опоры, то три других должны быть расположены так, чтобы проекция центра тяжести системы находилась в треугольнике устойчивости. Достигается повышение устойчивости транспортного средства наряду с переносом значительных грузов при преодолении препятствий на сильно пересеченной местности. 1 з.п. ф-лы, 2 ил.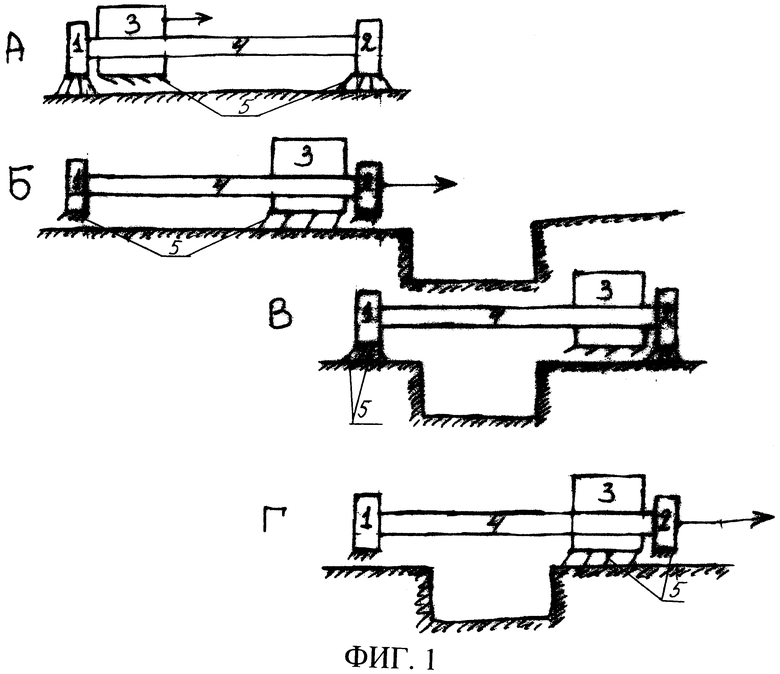
1. Устройство для преодоления препятствий, представляющее собой шагающее транспортное средство повышенной проходимости с движителями-ногами, отличающееся тем, что содержит трубу, на которой смонтированы три платформы, две платформы неподвижно закреплены на трубе, одна может перемещаться по трубе, каждая из платформ снабжена четырьмя механическими ногами с автоматическим приводом и датчиками - визуальными и тактильными и датчиками положения суставов ног для обеспечения устойчивого положения ног на неровной поверхности с возможностью адаптации и изменения положения ног путем переступания, причем ноги необходимы для обеспечения устойчивости, и если одна из ног поднята для поиска точки опоры, то три других должны быть расположены так, чтобы проекция центра тяжести системы находилась в треугольнике устойчивости.
2. Устройство по п.1, отличающееся тем, что каждая из ног имеет три степени свободы с возможностью поворота суставов на углы а1, а2, а3 посредством приводов, управляемых от бортового вычислительного устройства, которое обрабатывает информацию от датчиков, расположенных на ногах, и визуальную информацию с видеокамер.
| RU 2000242 C1, 25.06.1990 | |||
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| CN 101758867 A, 30.06.2010 | |||
| JP 2008080833 A, 10.04.2008 | |||
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |

