стного поглощающего аппарата - прототипа. Статистическая силовая характеристика аппарата-прототипа практически совпадает
с кривой ЕИК.
Поглощающий аппарат работает следующим образом.
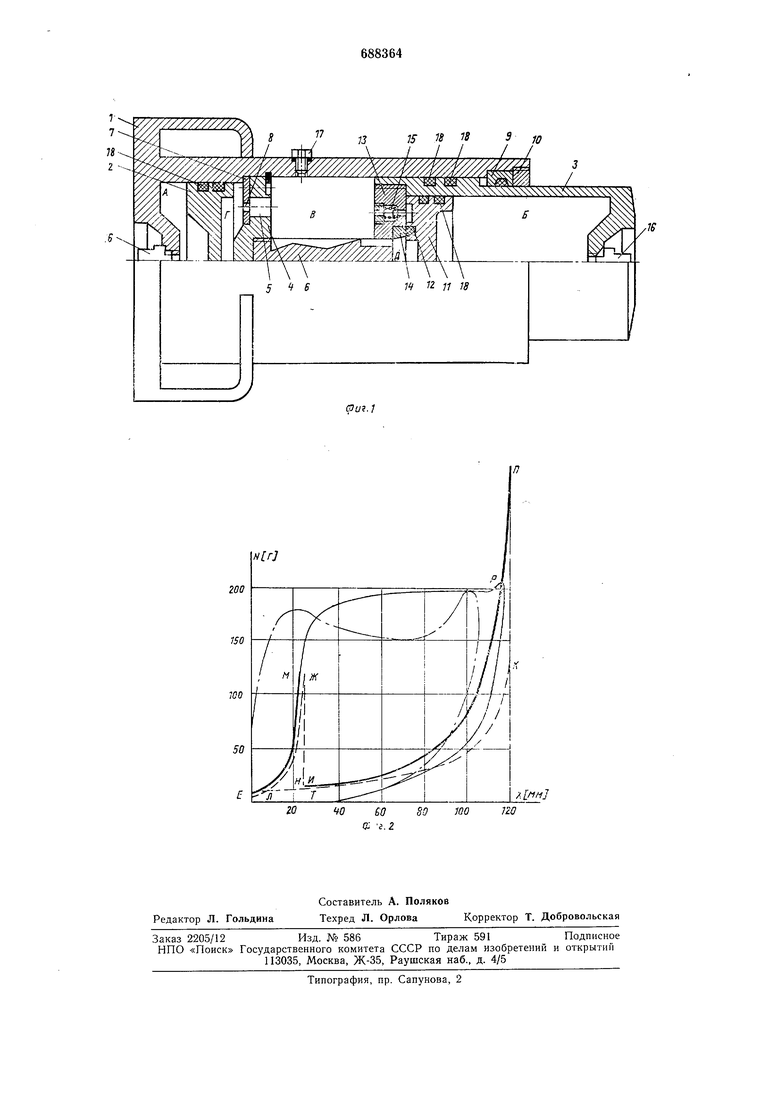
При действии на аппарат сжимающего усилия плунжер 3 перемещается во внутрь корпуса 1, вытесняя рабочую жидкость из полости В через отверстия 5 в днище 4 в полость Г; поршень упругого элемента 2 при этом перемещается в сторону днища упругого элемента, сжимая газ в камере А. При квазистатическом сжатии аппарата этой фазе его работы соответствует участок ЕЖ статической силовой характеристики, при динамическом сжатии - участок ЕМ динамической силовой характеристики упругого элемента. Когда давление газа в камере А достигнет заданной величины, т. е. когда произведение этой величины на площадь отверстия в седле 14 превысит произведение зарядного давления камеры Б на площадь плавающего поршня И, плавающий поршень 11 получит возможность перемещаться в сторону днища плунжера. Рабочая жидкость при этом из полости В через канавки в калибровочном стержне 6 будет дросселироваться в полость Д, перемещая плавающий поршень 11 в сторону днища плунжера. Если в начале движения поршня 11 давление в полости В будет меньше, чем в полости Г, обратный клапан 7 закроет отверстия 5, при этом полости Б и Г будут Сообщаться через дроссельные отверстия 8, замедляя скорость перемещения поршня 2 в сторону днища 4. При квазистатическом сжатии аппарата этой фазе его работы соответствует участок ЖИК статической силовой характеристики, при динамическом сжатии - участок МР динамической силовой характеристики аппарата.
После прекращения действия на поглощающий аппарат сжимающего усилия поршни 2 и 11 перемещаются соответственно в сторону днища 4 и диафрагмы 13, выжимая рабочую жидкость из полостей Г (через дроссельные отверстия 8) и Д (через канавки в калибровочном стержне 6) в полость В и перемещая при этом плунжер 3 в исходное положение. Этой фазе работы аппарата, если ей предшествовало динамическое сжатие, соответствует участок РТ динамической силовой характеристики, если квазистатическое - участок КИЛЕ статической силовой характеристики аппарата.
Формула изобретения
1.Гидрагазовый поглощающий аппарат автосцепки, состоящий из последовательно установленных упругого элемента и гидрогазоБОго амортизатора, содержащего цилиндрический корпус, в днище которого закреплен калибровочный стержень, и -плунжера с диафрагмой, внутри которого размещен плавающий поршень, отличающийс я тем, что, с целью повышения надежности работы и уменьшения износа деталей автосцепного устройства, диафрагма и плавающий поршень плунжера снабжены герметизирующими элементами.
2.Гидрогазовый поглощающий аппарат автосцепки по п. 1, отличающийся тем, что гидрогазовый амортизатор размещен в одном корпусе с упругим элементом, а в его днище выполнены отверстия, снабженные обратными клапанами с дроссельными отверстиями.
Источники инфор.мации, принятые во внимание при экспертизе 1. Кост Е. Л. и Самсонова С. А. Поглощающие устройства зарубежных грузовых вагонов в сборнике «Транспортное машиностроение, М., НИИИПФОРМТЯЖМАШ, № 18, 1975, с. 19 (прототип). 1373- 7 753 V/,,/,//. f0 /
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрогазовый поглощающий аппарат автосцепки | 1979 |
|
SU994326A1 |
| ГИДРОГАЗОВЫЙ ПОГЛОЩАЮЩИЙ АППАРАТ | 2021 |
|
RU2778581C1 |
| ПОГЛОЩАЮЩИЙ АППАРАТ АВТОСЦЕПКИ | 1994 |
|
RU2083406C1 |
| Гидрогазовый поглощающий аппарат | 2023 |
|
RU2801834C1 |
| Гидрогазовый поглощающий аппаратАВТОСцЕпКи жЕлЕзНОдОРОжНОгО TPAH-СпОРТНОгО СРЕдСТВА | 1979 |
|
SU796028A1 |
| Гидропневматический поглощающий аппарат железнодорожного транспортного средства | 1980 |
|
SU973404A1 |
| Гидрогазовый поглощающий аппарат | 1977 |
|
SU734044A1 |
| ПОГЛОЩАЮЩИЙ АППАРАТ АВТОСЦЕПКИ | 1990 |
|
RU2008233C1 |
| Гидрогазовый поглощающий аппарат автосцепки железнодорожного транспортного средства | 1979 |
|
SU931551A1 |
| ПОГЛОЩАЮЩИЙ АППАРАТ | 2014 |
|
RU2571145C1 |
50
по
