зацатчика с реверсирующим и корректирующим входами; систему изменения расхода суспензии, состоящую из дросселя, установленного на трубопроводе подачи суспензт, привода дросселя датчика расхода суспензии и регулятора производительности с входами сравнения и отключения привода дросселя; систему периодического удаления спека высокоадгезионного продукта, состоящую из датчика нагрузки, усилителя и программатора, причем датчик нагрузки связан с ротором, датчик расхода суспензии связан с поршнем объемного дозатора, входы и задатчик скорости вращения, ротора включены навстречу на входы регулятора скорости вращения ротора, который связан с приводом ротора, выходы датчика скорости вращения ротора и дат1щка расхода cycneFf зии включены на входы сравнения регулятора производительности, выход которого связан с входом привода дросселя, выход датчика нагрузки включен на вход усилителя, выход которого связан с корректирующим входом задатчика скорости вращения ротора и с входом программатора, выходы которого связаны с входом отключения привода дросселя регулятора производительности и реверсирующим входом задатчика скорости вращения ротора.
На чертеже представлена схема предлагаемого устройства.
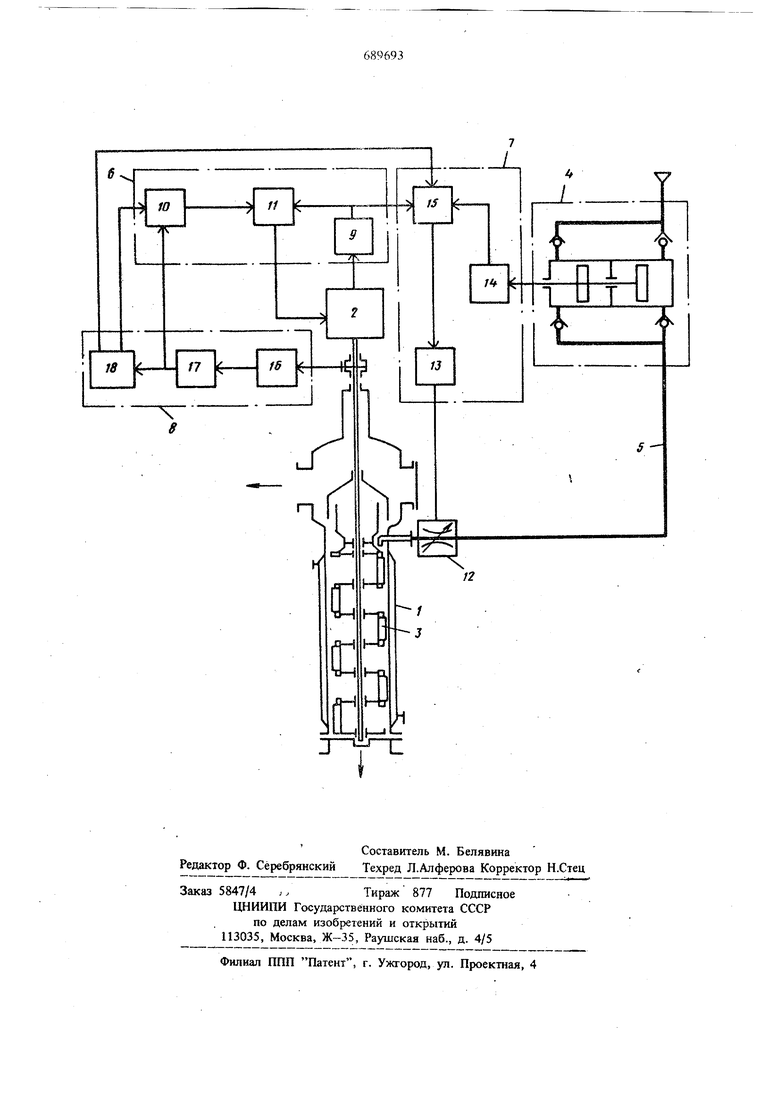
Устройство содержит тонкослойный аппарат 1 с обогреваемой внутренней стенкой и электроприводом 2- его ротора 3, на котором с возможностью поворота относительно оси, параллельной внутренней стенке, установлены лопатки, объемный дозатор 4 суспензии с плаваюидам поршнем, соединяющий их трубопровод 5 подачи суспензии, систему 6 пропорционального изменения скорости враздения ротора (СИС), систему 7 изменения оасхода суспензии (СИР), систему 8, периодического удаления спека высокоадгезионного продукта (СУС), СИС 6 содержит датчик 9 скорости вращения ротора, например, тахогенератор, задатчик 10 скорости вращения ротора в ввде регулируемого источника напряжения и регулятор скорости 11 в виде электронного усилителя с реверсивным тиристорным преобразователем, причем датчик 9 и задатчик 10 скорости включены навстречу на входы регулятора скорости 11, выход которого связан с электроприводом 2 ротора 3 аппарата 1.
СИР 7 снабжена Д{к)сселем 12, установленным на линии подачи суспензии в аппарат, с приводом 13 в виде реверсивного электродвигателя, датчиком ,14 расхода, например, индукционным, фиксирующим скорость плавающего поршня объемного дозатора 4 и регулятором 15 производительности в виде электронHoiO усилителя с реверсивным тиристорным усилителем мощности с входами сравнения и отключения привода дросселя. При этом выход регулятора 15 включен на вход привода 13 дросселя 12, а входы сравнения - на выход датчика 14 и датчика 9.
СУС 8 содержит датчик 16 нагрузки, связанный с ротором 3 аппарата 1, например, тензометрический датчик крутящего момента, усилитель 17 и программатор 18 в виде электромеханического командоаппарата с реле включения, причем вход датчика 16 включен на вход усилителя 17, выход которого связан с входом программатора 18.
Связь. между системами осуществляется следующим образом: выход усилителя 17 связан с корректирующим входом задатчика 10 СИС 6, один выход программатора 18 СУМ 8 связан с реверсирующим входом задатчика 10 СИС 6, другой с входом отключения привода дросселя регулятора 15 СИР. Вход датчика 9 СИС 6 включен навстречу датчику расхода 14 на вход сравнения регулятора производительности 15 СИР 7.
Устройство для. получения порошкообразны веществ из суспензированных работает следующим образом. При определенной номинальной для каждого порошкообразного вещества скорости вращения электропривода 3 ротора 2 тонкослойного аппарата 1, поддерживаемой СИС 6, и определенном вакууме в аппарате 1, с помощью плавающего поришя 5 объемного дозатора 4 осуществляют подачу суспензии высокоадгезионного порошкообразного вещества через дроссель 12 в аппарат 1 с расходом, обеспечивающим создание на внутренней обогреваемой поверхности аппарата 1 тонкой пленки, соизмеримой для высокоадгезионных веществ с размером частиц конечного порошкообразного продукта, т. е. меньше, чем при получении низкоадгезио.нных веществ.
Высушенный на обогреваемой стенке тонкослойного аппарата 1 от жидкой фазы продукт в виде порошка поступает через нижнюю часть аппарата I в приемник порошка, а пары жидкой фазы, пройдя противотоком через тонкослойный аппарат 1 поступают на конденсаци в вакуумную систему.
В начальный период работы регулятор скорости 11 с помощью датчика 9 и задатчика 10 поддерживают благодаря обратной связи по скорости через ротор 2 аппарата 1 скорость вращения электропривода 2 ротора 3 постоянной. При этом регулятор 15 с помощью датчика 9 и датчика 14 поддерживает постоянным расход суспензии в аппарат 1 из дозатора 4 через дроссель 2 в соответствии со скоростью
вращения ротора, принятой для данного вещесва. В начальный пернод, когда нет образования спека, СУС 8 активно не работает, посколку сигнал с выхода усилителя постоянен.
При постепенном образовании спека высокоадгезионного порошкообразного продукта на внутренней обогреваемой стенке аппарата 1 и лопатках ротора 3 падает мгновенная производительность по порошку - нагрузка, т. е. крутящий момент, на роторе 3 возрастает. При этом датчик 16 посылает сигнал, пропорциональный возрастанию нагрузки, через уси,литель на корректирующий вход задатчика 10. Задатчик 10 изменяет в соответствии с поступающим сигналом задачу скорости регулятору 11, а регулятор, отработав сигнал, изменяет скорость вращения электропривода 2 ротора 3. При этом датчик 9 передает сигнал, соответствующий измененной скорости ротора 3 на вход сравнения регулятора .15, который с помощд ю привода 13 дросселя 12 изменяет расход до величины, соответствующей скорости ротора 3 и нагрузки на нем, т.е. - равенству сигналов на входах сравнения от датчика скорости ротора и датчика расхода суспензии. При достижении нагрузкой на роторе 3 определенной пороговой величины начинается активная, работа СУС 8. Постзтшвший из усилителя на реле включения программатора 18 сигнал включает в работу электромеханический командоаппарат, который выдает на узел отключения привода 13 дросселя 12 в регуляторе 15 сигнал на закрытие дросселя 12 и временное прекращение подачи..С небольшой выдержкой времени, обеспечивающей удаление жидкой фазы из порции суспензии, находящейся в линии подачи после дросселя 12 и поступившей в аппарат 1 под действием вакуума после закрытия дросселя 12, программатор 18 с другого выхода дает сигнал на изменение знака задачи скорости задатчику 10 на противопложный и увеличивает величину задачи скорости. Этот сигнал воздействует на регулятор 11, который на определенное время изменяет направление скорости вращения электропривода 2 ротора 3 на противопложное и скачкообразно увеличивает при этом скорость вращения. При этом спеки высокоадгезионного продукта стряхиваются с лопаток ротора и срезаются ими с греющей поверхности аппарата 1, поскольку лопатки ротора при такой инверсии превращаются в срезающие спеки ножи. При своем падении вниз спеки разбиваются и измельчаются лопатками ротора 3. По истечении времени удаления спека программатор 18 вновь изменяет задачу задатчику 10 скорости по величине и направлению, уменьщая скорость ротора 3 посредством регулятора 11 до номинальной
ДЛЯ дашюго вещества, а также воздействует посредством регулятора 15 на привод 13 дросселя 12, приводя все элементы системы в положение, соответствующие отсутствию нагрузки на роторе, номинальным скорости вращения ротора 3 аппарата I и расходу суспензии в него порщнем 5 дозатора 4 через дроссель 12. Программатору 18 может быть задана программа многократного реверсирования : электропривода 2. В дальнейшем цикл работы j устройства повторяется.
Формула изобретения Устройство для получения порошкообразных веществ иэ суспензированных, включающее объемный дозатор суспензии, тонкослойный аппарат с обогреваемой внутренней стенкой и приводом его ротора и соединяющий их трубопровод подачи суспензии, отличающееся тем, что, с целью получения высокоадгезионных порошкообразных веществ непосредственно в тонкослойном аппарате путем периодического удаления спеков, оно дополнительно содержит: систему пропорционального изменения скорости вращения ротора, состоящую из датчика, регулятора и задатчика с реверсирующим и корректирующим входами; систему изменения расхода суспензии, состоящую из дросселя, установленного на трубопроводе подачи суспензии, привода дросселя, датчика расхода суспензии и регулятора производительности с входами сравнения и отключения привода дросселя; систему периодического удаления спека высокоадгезионного продукта, состоящую из датчика нагрузки, усилителя и программатора, причем датчик нагрузки связан с ротором, датчик расхода суспензии связан с объемным дозатором, входы датчика и задатчика скорости вращения ротора включены навстречу на входы регулятора скорости вращения ротора, который связан с приводом ротора, выходы датчика скорости вращения ротора и датчика расхода суспензии включены на входы сравнения регулятора производительности, выход которого связан с входом привода дросселя, выход датчика нагрузки включен на вход усилителя, выход которого связан с корректирующим входом задатчика скорости вращения ротора и с входом программатора, выходы которого связаны с входом отключения привода дросселя регулятора производительнос.ти и реверсирующим входом задатчика скорости вращения ротора.
Источники информации, принятые во внимание при экспертизе
1.Проспект фирмы Luwa, AG Zurich (Швейцария), с. 18, фиг. 126.
2.Проспект фирмы Samesrenther (ФРГ),, с. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЯ ГИДРОМЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВСПОМОГАТЕЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2637272C2 |
| РЕГУЛЯТОР РАСХОДА ГАЗА | 2013 |
|
RU2509334C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ РЕАГЕНТОВ | 1991 |
|
RU2081848C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474711C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| Устройство для получения высокоадгезионных порошкообразных веществ | 1980 |
|
SU901776A1 |
| Электропривод кузнечного пресса | 1985 |
|
SU1295500A1 |
| Способ автоматического управления реверсивным движением гидродвигателя | 1985 |
|
SU1275124A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |