Изобретение относится к гидроавтоматике и может быть использовано при создании промышленных роботов и манипуляторов, а также специализированных насосных агрегатов.
Цель изобретения - расширение диапазона применения и повышение быстродействия.
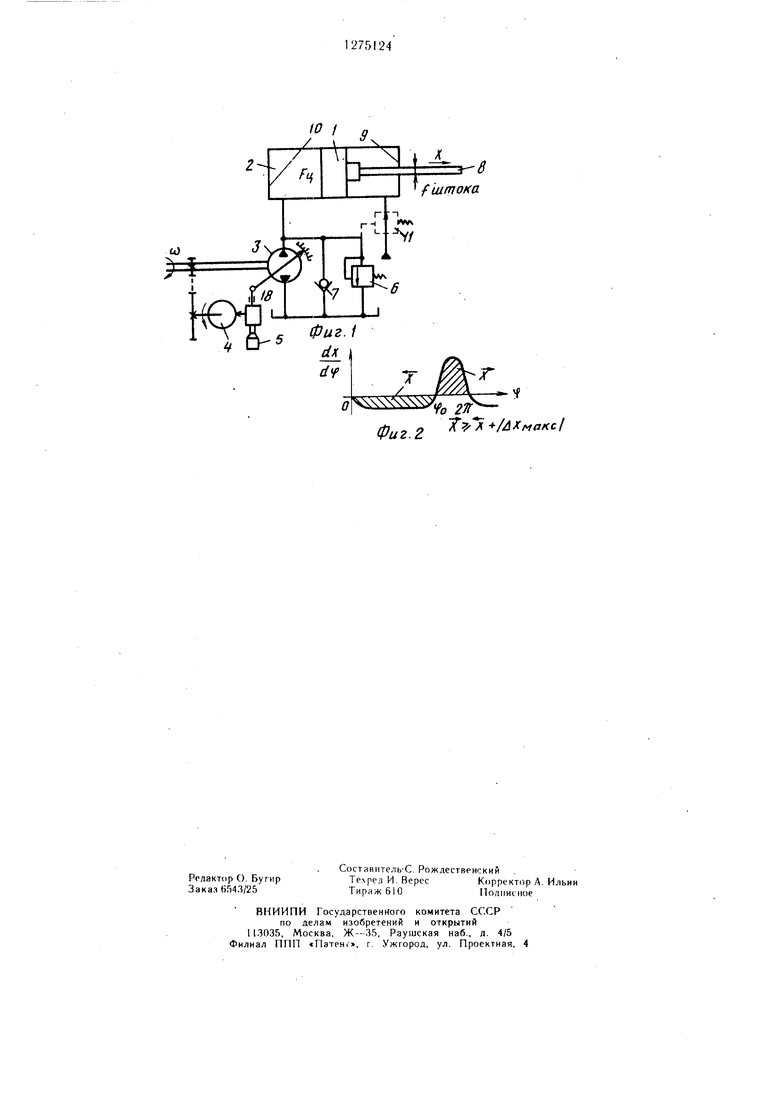
На фиг. 1 изображена схема реверсивного гидродвигателя и системы управления для реализации предлагаемого способа; на фиг. 2 - вариант графика программного закона движения гидродвигателя; на фиг. 3 - вариант выполнения реверсивного гидродвигателя для управления поршнем насоса-дозатора, перекачиваюш,его биологически активные легко разрушаемые жидкости согласно предлагаемому способу.
Реверсивный гидродвигатель с систе.мой управления содержит гидроцилиндр 1 одностороннего действия, к приводной полости 2 которого непосредственно подключен реверсивный дозируюший насос 3, снабженный кулачковым программатором 4, синхронизированным с движением вала насоса 3 и позволяюш им с помощью промежуточного пропорционального задатчика 5 изменять рабочий объем дозирующего насоса 3 в диапазоне -цмакс q - qiiaKc, где цмакс - максимальная величина рабочего объема, которая устанавливается задатчиком 5. Насос 3 шунтирован предохранительным 6 и обратным 7 ютапанами.
Шток 8 гидроцилиндра 1, связанный с его поршнем (не показан), перемещается в диапазоне между упорами 9 и 10. К штоковой полости гидроцилиндра 1 подводится жидкость под давлением, например, через редуктор 11 давления, управляемый по давлению в полости 2 гидроцилиндра 1.
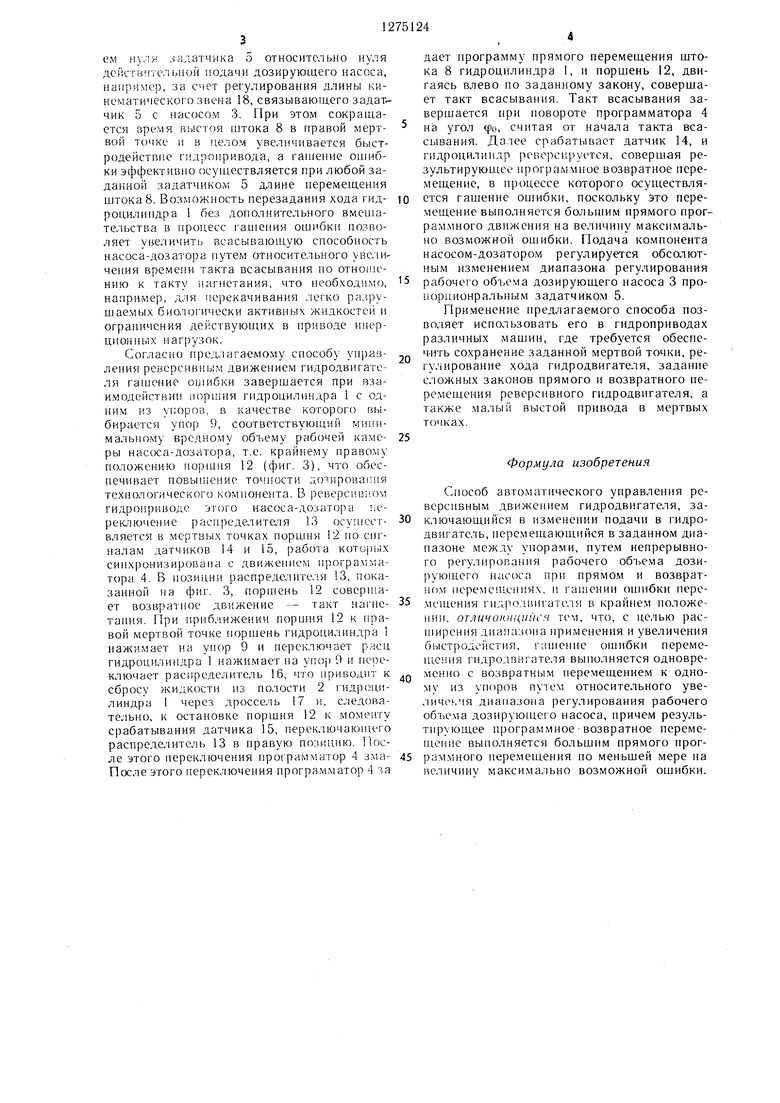
Кулачок (не обозначен) программатора 4 выполняется с профилем, обеспечивающим программное движение гидроцилиндра 1, например, в соответствии с графиком на фиг. 2 (где X - перемещение штоков 8, Ф - угол поворота кулачка программатора, фо - угловое положение кулачка при реверсе).
При использовании реверсивного гидродвигателя для управления поршнем 12 насоса-дозатора (не обозначен), перекачивающего высоковязкие или легко разрушаемые жидкости, для реверса гидроцилиндра 1, служит промежуточный реверсирующий распределитель 13, имеющий электромагниты переключения (не обозначены), связанные с датчиками 14 и 15 положения. Упор 9 (фиг. 3) соединен с двухпозиционным распределителем 16, связанным со сливом и через дроссель 17 с камерой 2. Программатор 4 и задатчик 5 связаны с регулирующим органом насоса 3 кинематическим звеном 18.
Способ автоматического управления реверсивным движением гидродвигателя реализуется следующим образом.
При вращении вала дозирующего насоса 3 жидкость подается в полость 2 гидроцилиндра 1 и шток 8 перемещается вправо к упору 9. При этом одновременно вращается кулачок программатора 4, который через пропорцио1 альный задатчик о изменяет рабочий.объем насоса 3 в зависимости от программы движения штока 8, определяемой профилем кулачка программатора 4. Дальнейшее вращение вала насоса 3 приводит к реверсированию подачи насоса 3, и гидроцилиндр 1 реверсируется, т.е. шток 8 начинает перемещаться к упору 10. Ход штока 8 при заданном профиле кулачка может перезадаваться изменением диапазона регулирования рабочего объема насоса 3 пропорциональным задатчиком 5, позволяющим перезадавать ве тичину максимально реализуемого рабочего объема насоса 3, т.е. величину + я«акс. За счет утечек жидкости диапазон движения штока 8 может произвольно смещаться к одному из упоров 9 или 10, т.е. возникает ошибка перемещения штока 8. Этот не5 же.1ательный эффект устраняется тем, что возвратное перемещение Х штока 8, например, к упору 9 осуществляется по результирующей программе, представляющей собой совмещенные и Езыполняемые одновременно программу возвратного заданного движения и программу гапления ошибки. При этом результирующее программное возвратное перемещение к упору 9 выполняется боль шим прямого программного перемещения X к упору 10 по меньшей мере па величину максимально возможной ошибки, т.е.
Х К + /Дхмакс/. В результате, при периодическом реверсировании гидроцилиндра 1 шток 8 в каждом возвратном ходе останавливается упором 9, т.е. при любом максимальном рабочем объе.ме qMaK, заданном 0 задатчиком 5, правая мертвая точка 1птока 8 остается неизменной. При этом возвратное движение осуществляется по программно-заданному закону, (фи 2) в диапазоне углов поворота программатора 4 q;o-2л, а прямое движение -- по закону (фиг. 2) в диапазоне углов поворота программатора О-фо.
Точность выполнения программного движения повышена установкой редуктора 11, стабилизирующего рабочий перепад давления на дозирую1цем насосе 3 независимо от полезной нагрузки на шток 8.
Одновременное выполнение програ.мм возвратного движения и гашения О1иибки осуществляется за счет увеличения диапазона рабочего объема дозируюп;его насоса 3 относительно этого диапазона при прямом движении, что практически осуществляется или изменением профиля кулачка, или смещением н.;й за;1атчика о относительно нуля действительной подачи дозирующего насоса, например, за счет регулирования длины кинематического звена 18, связывающего задатчик 5 с насосом 3. При этом сокращается гфемя вьктоя штока 8 в правой мертвой точке и в целом увеличивается быстродействие гидропривода, а гашение ошибки эффективно осуществляется при любой заданной задатчиком 5 длине неремещения щтока 8. Возможность перезадания хода гидрощиишдра без дополнительного вмешательства в процесс гашения ошибки позволяет увеличить всасывающую способность насоса-дозатора путем относительного увеличения времени такта всасывания по отношению к такту нагнетания, что пеобходм,О, например, для перекачивания легко разрушаемых биологически активных жидкостей и ограничения действуюн1,их в приводе инерционных нагрузок.
Согласно предлагаемому способу унравления реверсивным движением гидродвигателя га1пение о либки заверщается при взаимодействии гидроцилиндра 1 с одним из vrjopoa, в качестве которого выбирается упор 9, соответствующий минимальному вредному объему рабочей камеры насека-дозатора, т.е. крайнему правому положению норшня 12 (фиг. 3), что обеспечивает новып1еиие дотирования технологического компонента. В реверси.вгОм гидроприводе этого насоса-дозатора переключение распределителя 13 ocyniecrвляетея в мертвых точках поршня 12 но сигналам датчиков 14 и 15, работа KOTopi ix синхронизирована с движением программатора 4. В позиции распределителя 13, показанной на фиг. 3, поршень 12 coBCpniaет возвратпое движение - такт нагиетания. При приближении поршня 12 к tipaвой мертвой точке поршень гидроцилиндра 1 нажимает на упор 9 и переключает рас ц гидроцилипдра 1 нажимает на упо) 9 и переключает распределитель 16, что приводит к сбросу жидкости из полости 2 гидроцилиндра 1 через дроссель 17 и, следовательно, к остановке поршня 12 к моменту срабатывания датчика 15, переключающего распределитель 13 в правую позицию. После этого переключения программатор 4 змаПосле этого переключения программатор 4 за
дает программу прямого перемещения щтока 8 гидроцилиндра 1, и поршень 12, двигаясь влево по заданному закону, совершает такт всасывания. Такт всасывания заверщается при повороте программатора 4 на угол фо, считая от начала такта всасывания. Далее срабатывает датчик 14, и гидроцилиндр реверсг.руется, совершая результирующее программное возвратное перемещение, в нроцессе которого осуществляется гашение ошибки, поскольку это пере.мещение выполняется большим прямого программного движения на величину максимально возможной ошибки. Подача компонента насосом-дозатором регулируется обсолютным изменением диапазона регулирования рабочего объема дозирующего насоса 3 пропорционральным задатчиком 5.
Применение нредлагаемого способа позволяет использовать его в гидроприводах различных машин, где требуется обеспеч-ить сохранение заданной мертвой точки, регулирование хода гидродвигателя, задание сложных законов прямого и возвратного персмешения реверсивного гидродвигателя, а также малый выстой привода в мертвых точках.
Формула изобретения
Способ автоматического управления реверсивным движеннем гидродвигателя, заключающийся в изменении подачи в гидродвигатель, перемещающийся в заданном диапазоне меж.1у упорами, путем непрерывного регулирования рабочего объе.ма дозирующего насоса при прямо.м и возвратном перемещениях, и гашении ошибки пере.кчцения гидродвигателя в крайне.м ноложении, отличающийся тем, что, с целью расширения .аиапазона нрименения и увеличения быстродейстия, гашение ошибки перемещения гидродвигателя выполняется одновременно с возвратным перемещением к одному из упоров nyicM относительного увеличекчя диапазона регулирования рабочего объема дозирующего насоса, причем результирующее программное возвратное перемеHienne выполняется больщим прямого прог)ам.много неремещения по меньщей мере на жмичину максимально возможной ошибки.
.
fo 27Г
Фиг 2 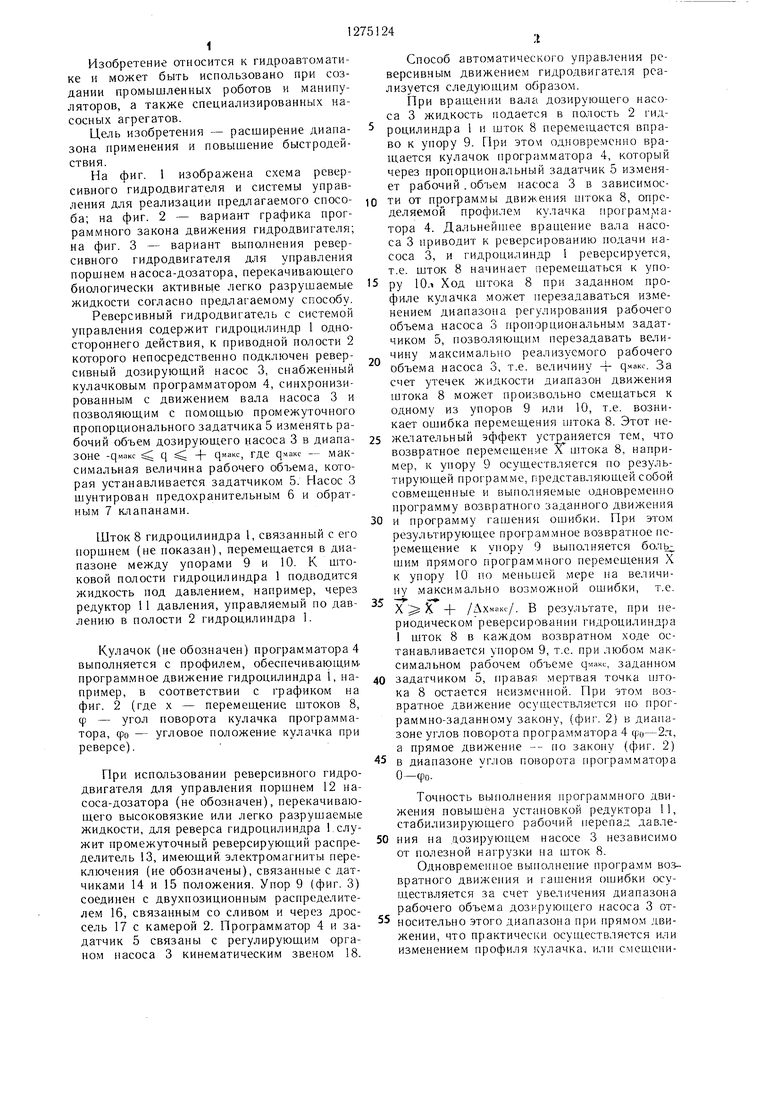
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1981 |
|
SU1015133A1 |
| Гидравлическая система управления исполнительным органом | 1984 |
|
SU1183721A1 |
| Гидравлический привод манипулятора | 1986 |
|
SU1346857A1 |
| Электрогидравлическая следящая система | 1976 |
|
SU926379A1 |
| Устройство для введения жидких удобрений в поливную воду | 1988 |
|
SU1716995A1 |
| Объемная дозировочная установка | 1974 |
|
SU520456A1 |
| СПОСОБ СЖАТИЯ ГАЗА ИЛИ ГАЗОЖИДКОСТНОЙ СМЕСИ С ПОМОЩЬЮ ПРОТОЧНОГО ЖИДКОСТНОГО ПОРШНЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2306454C2 |
| Гидропривод манипулятора | 1976 |
|
SU817331A1 |
| Устройство для введения жидких удобрений в поливную воду | 1989 |
|
SU1753983A1 |
| ГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД | 1972 |
|
SU335450A1 |
Изобретение относится к области гидроавтоматики и может быть использовано при создании промышленных роботов и манипуляторов, а также специализированных насосных агрегатов. Целью изобретения являете расширение диапазона применения и повышение быстродействия. Гашение ошиб2 1 9 17 5 3 Фиг.З ки перемещения гидродвигателя 1 выпапняется одновременно с возвратным его перо мещением к одному из упоров 9 или 10 Реверсивный дозирующий насос 3 снабжен кулачковым программатором 4, который с помощью промежуточного пропорционального задатчика 5 увеличивает рабочий объем насоса 3. Результирующее программное возвратное перемещение выполняется большим прямого программного перемещения по меньшей мере на величину максимально возможной ошибки. Изобретение позволяет обеспечить сохранение заданной мертвой точки, регулирование хода гидродвигателя и сложный закон прямого и обратного его хода, а также малую высоту привода в мертвых точках. 3 ил(Л 1 г Ю «vj сд ts5 4;
| Гидравлический привод | 1981 |
|
SU1015133A1 |
| кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
