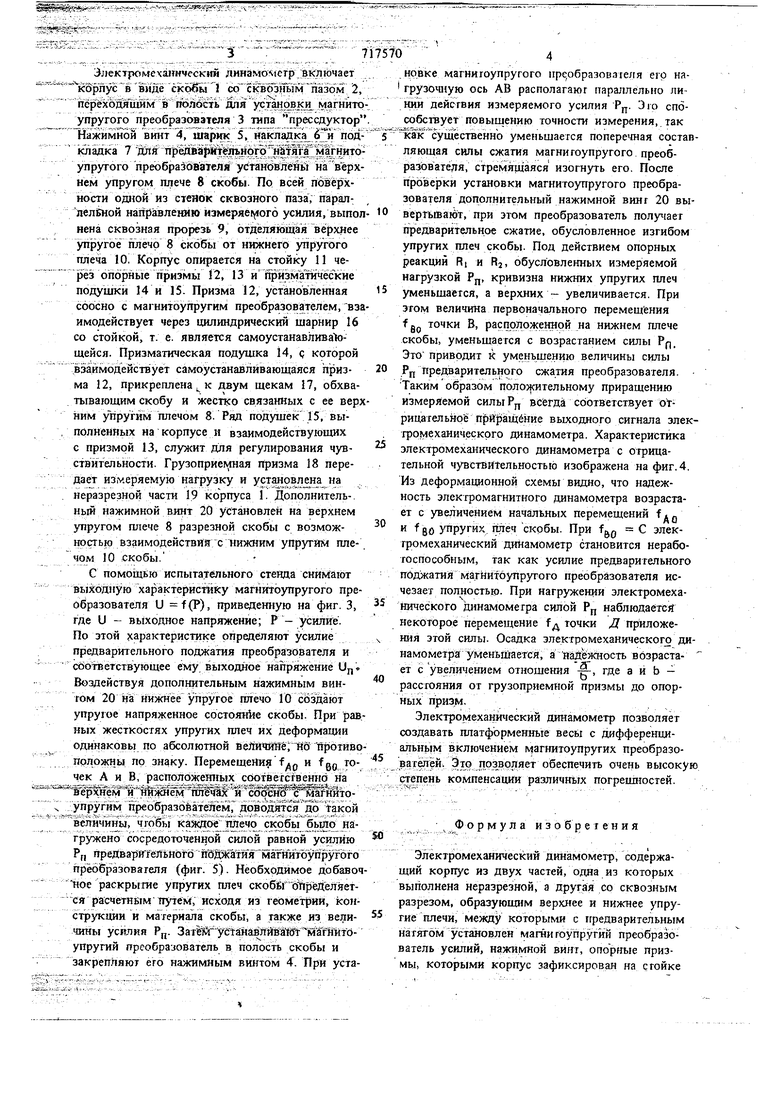
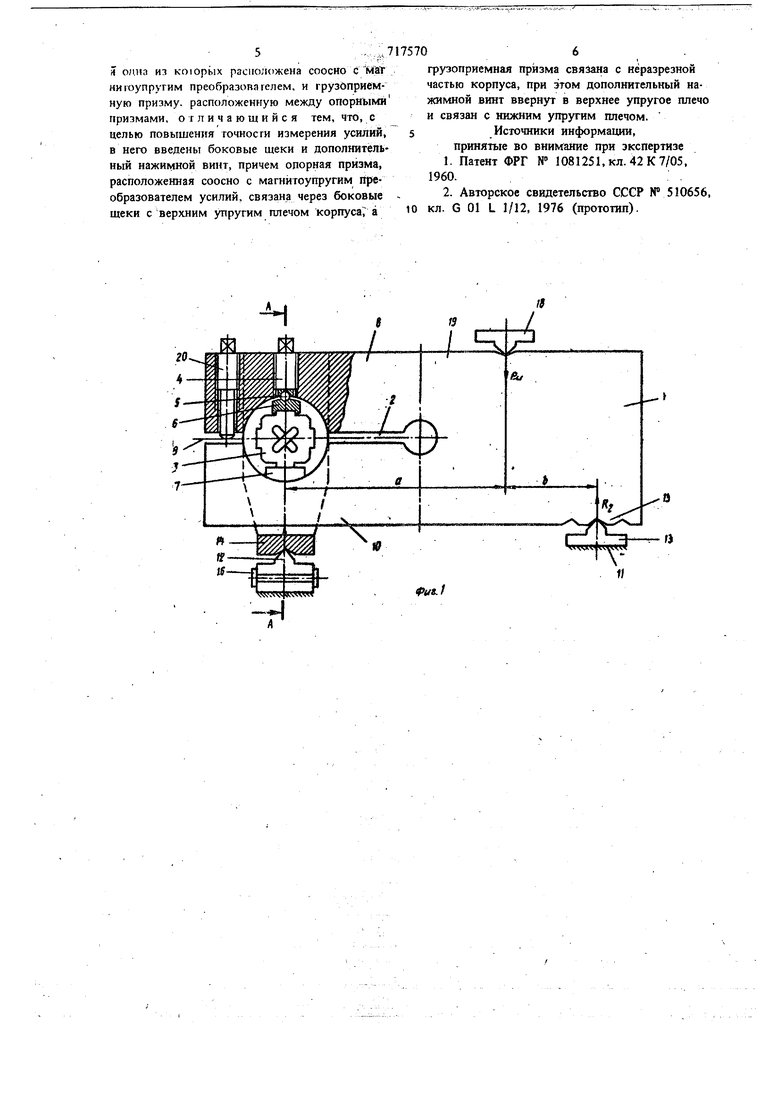
Изобретение относится к электромеханической силоизмерительной технике и может быть нспользовано в платформенных весах с дифференциальным включением магнитоупругих преобразователей силы в электрический сигнал. Известен магнитоупругий динамометр, содер жащий магнитоупругий преобразователь, установленный с предварительным натягом в замкн той полости монолитного корпуса 1. Однако этот динамометр не обеспечивает тре буемой точности измерения усилий. Наиболее близким по технической сущности к предложенному является злектромеханический динамометр, содержащий корпус, состоящий из двух частей, одна из которых выпол-, иена неразрезной, а другая с горизонтальным сквозным разрезом, образующим верхнее и . нижнее упругие плечи, между которыми с пред варительным натягом установлен магнитоупругий преобразователь усилий, натяжной винт, опорные призмь, которыми корпус зафиксирован на стойке и одна из которых расположёна соосно с магнитоупругим преобразователем. И грузоприемную призму, расположенную между призмами 2. Недостатком этого динамометра является низкая точность измерения усилий. Цель изобретения - повышение точности измерения усилий. Это достигается тем, что в электромеханический преобразователь введены боковые щеки и дополнительный нажимной винт. ОпЬрная призма, расположенная соосно с магнитоупругим преобразователем усилий, связана через боковые щеки с верхним упругим плечом корпуса, а грузоприемная призма связана с неразрезной частью корпуса. Дополнительный натяжной винт ввернут в верхнее упругое плечо и связан с нижним упругим плечом. На фиг. 1 изображен электромеханический динамометр; на фиг. 2 - то же, разрез А-А на фиг. 1; на фиг. 3 - характеристика магнитоупругого преобразователя типа прессдуктор ; на фиг. 4 - характеристика электромеханического динамометра; на фиг. 5 - деформационная схема. Электреме а1 ическ:ий динамометр включает Vopnyc в виде скобы 1 со ск8бз{Тым пазом 2, переходящим в полость для устан(№ки магнито упругого преобразователя 3 типа прессдуктор Нажимной винт 4, шарик 5, накладка ёГ подкладка 7 для предварительного нйтяга магнитоупрутого преобразователя установлены на верхнем упругом плече 8 скобы По всей поверхности одной из стеябк сквозного паза, параллелбной направлению иэмеряегуюго усилия, выпол нена сквозная прорезь 9, отделяющая верхнее упругое плечо 8 скобы от нижнего упругого плеча 10 Корпус опирается на стойку 11 через опорные призмы 12, 13 и призматичёские подушки 14 и 15- Призма 12, установленная соосно с магнитоупругим преобразователем, вза имодействует через цилиндрический шарнир 16 со стойкой, т. е. является самоустанавлива щейся. Призматическая подушка 14, с которой взаимодействует самоустанавлйвающаяся призма 12, прикреплена i к двум щекам 17, обхватывающим скобу и жестко связанных с ее верх ним Упругим плечом 8. Ряд подушек 15, выполненных на корпусе н взаимодействующих с призмой 13, служит для регулирования чувствительности. Грузоприер ная призма 18 передает измеряемую нагрузку и установл на на неразрезной части 19 корпуса 1. Дополнитель-. ньгй нажимной в,инт 20 установлен на верхнем упругом плече 8 разрезной скобы с возможшстью взаимодействия с нижним упругим плечом 10 скобы. С помощью испытательного стенда снимают выданную характеристику магнйтоупругого преобразователя и f(P), приведенную на фиг. 3, где и - выходное напряжение; Р - усилие. По зтой характеристике определяют усилие предварительного поджатия преобразователя и сботаегствующее ему выходное напряжение 1)« Воздействуя дополнительным нажимным винтом 20 на нижнее упругое плечо 10 создают упругое напряженное состоян11е скобы. При рав,ных жесткостях упругих плеч их деформации одинаковЬ1 по абсолютной веййЧйНё; н6 прОтиво прлозкны по знаку. Перемещение , и fgg тоупругим преобразователем, доводятся о Такой величины, чтобы каждое тшечо скобы было нагружена сосредоточенной силой равной усилию Р„ предварительного шдаатаямагнитоупругого прёобразовагеля (фиг. 5). Необходимое добавоч ное раскрытие упругих плеч скоббГ ШреДеляется расчетным путем, исходя из геометрий, конструквди н материала скобы, а также из BeJiHчины усилия РП- Заг йГ7ЙШайЯШ1йт йагнйтоупругий преобразователь в полость скобы и закрепляют его нажимным винтом 4. При уста717570
Ф о р м у л а изобретения
Электромеханический динамометр, содержащий корпус из двух частей, одна из которых выполнена неразрезной, а другая со сквозным разрезом, образующим верхнее и нижнее упругие плечи, между которыми с предварительным натятом установлен магни тоупругий преобразователь усилий, нажимной винт, опорные призмы, которыми корпус зафиксирован на стойке нрЕке магнйтоупругого пре.образовзтепя его нягрузочную ось АВ располагают параллельно линии действия измеряемого усилия . Это способствует повышению точности измерения, так ак существенно уменьшается поперечная составляющая силы сжатия магнйтоупругого преобразователя, стремящаяся изогнуть его. После проверки установки магнитоупругого преобразователя дополнительный нажимной винт 20 вывертывают, при этом преобразователь предварительное сжатие, обусловленное изгибом упругих плеч скобы. Под действием опорных реакш1Й RI и RJ, обусловленных измеряемой нагрузкой PI,, кривизна нижних упругих плеч уменьшается, а верхних - увеличивается. При этом величина первоначального перемещения f gp точки В, расположенной на нижнем плече скобы, уменьшается с возрастанием силы Pp. Это приводит к уменьшению величины силы Рд предаарительн9го сжатия преобразователя. Таким образом положительному приращению измеряемой силыРу всегда соответствует отрицательное прйращёние выходного сигнала электромеханического динамометра. Характеристика электромеханического динамометра с отрицательной чувствительностью изображена на фиг. 4. Из деформавдонной схемы видно, что надежность электромагнитного динамометра возрастает с увеличением начальных перемещений f.. и Вб упругих, плеч скобы. При f, С электромеханический динамометр становится неработоспособным, так как усилие предварительного поджатия магнйтоупругого преобразователя исчезает ПОЛНОСТЬЮ- При нагружении электромеханического Ьнамометра силой Pjj наблюдаете некоторое перемещение f д точки Д приложения этой силы. Осадка электромеханическог о динамометра уменьшается, а надежность возраста- ет с увеличением отношения -, где а и b расстояния от грузоприемной призмы до опорных призм. Электромеханический динамометр позволяет создавать платформенные весы с дифференш альным включением магнитоупругих преобразователей. Это позволяет обеспечить очень высокую степень компенсации различных погрешностей.
я одна из коюрых расположена соосно ниюупругим Преобразова гелем, и грузоприемную призму, расположенную между опорными призмами, отличающийся тем, что, е целью повышения точности измерения усилий, в него введены боковые щеки и дополнительный нажимной винт, причем опорная призма, расположенная соосно с магнйтоупругим преобразователем усилий, связана через боковые щеки с верхним упругим плечом корпуса; а
грузоприемная призма связана с нёразрезной частью корпуса, при этом дополнительный нажимной винт ввернут в верхнее упругое плечо и связан с нижним упругим плечом.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ N 1081251, кл. 42 К 7/05, 1960.
2.Авторское свидетельство СССР № 510656, кл. G 01 L 1/12, 1976 (прототип).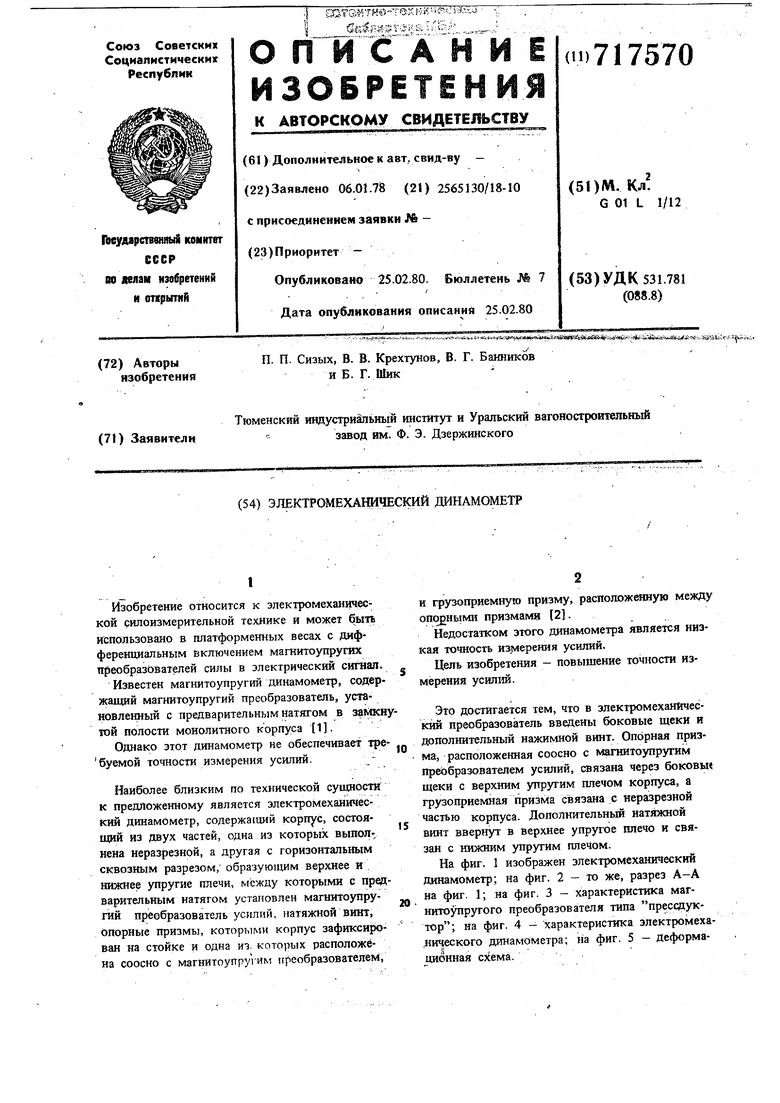
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр | 1978 |
|
SU769369A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ | 1972 |
|
SU435463A1 |
| ПТ Б | 1973 |
|
SU393962A1 |
| Устройство для взвешивания мульд | 1978 |
|
SU744238A1 |
| Магнитоупругий динамометр | 1974 |
|
SU510656A1 |
| Электромеханические платформенные весы | 1983 |
|
SU1089426A1 |
| Грузоприемное устройство железнодорожных весов | 1983 |
|
SU1193466A1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
Фиг5
