(54) ДИНАМОМЕТР


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ | 1972 |
|
SU435463A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| ПТ Б | 1973 |
|
SU393962A1 |
| Электромеханический динамометр | 1978 |
|
SU717570A1 |
| Электромеханические платформенные весы | 1983 |
|
SU1089426A1 |
| Магнитоупругий преобразователь усилий | 1987 |
|
SU1483293A1 |
| Устройство для обнаружения движущегося по рельсам объекта | 1978 |
|
SU710852A1 |
| Грузоприемное устройство железнодорожных весов | 1983 |
|
SU1193466A1 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| Магнитоупругий динамометр | 1974 |
|
SU510656A1 |

Изобретение относится к технике контроля и .измерения больших силовых нагрузок ударного характера и быть использовано в электромеханических динамометрах, основанных на применении магнитоупругих преобразователей силы в электрический сигнал и монолитных корпусов, выполненных в виде незамкнутых скоб.
Известны электромеханическ1ие динамометры, предназначенные для эксплуатации в самых тяжелых промышленных условиях. В этих динамометрах магнитоупругий преобразователь - пресс-дуктор, имеющий относительно небольшие размеры, встраивается в Массивный корпус, изготовленный из стальной плиты. Кол фигурация прорезей в корпусе обеспечивает малую жесткость верхних горизонтальных перемычек в направлении действия усилия, что дает возможность передавать на пресс-дуктор практически все измеряемое усилие. В то же время такая конструкция обеспечивает равномерный и постоянный характер распределения нагрузки в механических контактах между магн.итопроводом пресс-дуктора и корпусом динамометра, а также способствует разгрузке пресс-дуктора от горизонтальных составляюших измеряемой силы 1.
Пресс-дуктор имеет несколько большие размеры, чем окно в корпусе. Поэтому окно
.
должно принудительно слегка раскрываться, чтобы можно было установить прессдуктор, который при этом оказывается предварительно напряженным примерно до 10% 5 от поминальной нагрузки за счет упругой дефор.мации перемычек.
Однако усилие предварительного поджатия пресс-дуктора, .как правило, превышает указанную величину и может достигать 10 30% от номинальной нагрузки динамометра и более.
Наиболее близкими по технической суш,ности являются магнгитоупругие динамометры, содержашие корпус в виде разомкнутой 15 скобы, магнитоупругий преобразователь (пресс-дуктор), установленный с натягом между грузоприемньш и опорным плечами оКобы, 1И приопособление для трелва1рительного натяга 1магнитоуп1ругого преобразователя, установленное на корпусе и в шолненное в виде нажимного винта, анлопередаюшего .шарика и накладки 2.
Недостатками этих динамометров являются неравномерность распределения на25 грузки по виткам резьбы нажимного винта, сопровождаемой к тому же концентрацией напряжений, что неблагоприятно сказывается на несущей способности винтовой кинематической пары, особенно при динаадичес30 кой нагрузке, применение силопередаюшего
шарика относительно малых размеров, 1концентрирую,щего переда.ваемую силовую нагрузку от нажимного винта на накладку практически в точке, недостаточная жесткость накладки, восприн1имающей нагрузку от шарика ,и передающей ее на силовоспринимаюшую плоскость магнитоупругого преобразователя, что способствует появлению гистерезиса от перераспределения нагрузки.
Целью изобретения является повышение точности динамометра при,контроле и измерении динамических усилий.
Указанная цель достигается тем, что в нем силопередающий узел устройства предвapитeльнoгo поджатия прербразователя выполнен в виде четырехзвенного пятиподвижного кинематического соединения, составленного из. двух вращательных одноподвижных и одной плоскостной трехподвижной низших, последовательно соединенных кинематических пар, при этом первая вращательная к,и,нвмат1Ическая пара образована цилиндрической пятой преобразователя и цилиндрической поверхностью опорного плеча скобы, а ее ось вращения совпадает с осью цилиндрической полости скобы, причем вторая вращательная кинематическая- пара образована цилиндрическими поверхностями, двух силопередающих накладок, примыкающих соответственно к грузоприемному плечу скобы и преобразователю, а ось вращения этюй пары перпендикулярна оси первой вращательной кинематической пары и нагрузочной оси преобразователя, при этом плоскостная кинематическая пара образована силовоспринима щей плоскостью преобразователя и плоскостью соответствующей сило.передающей накладки.
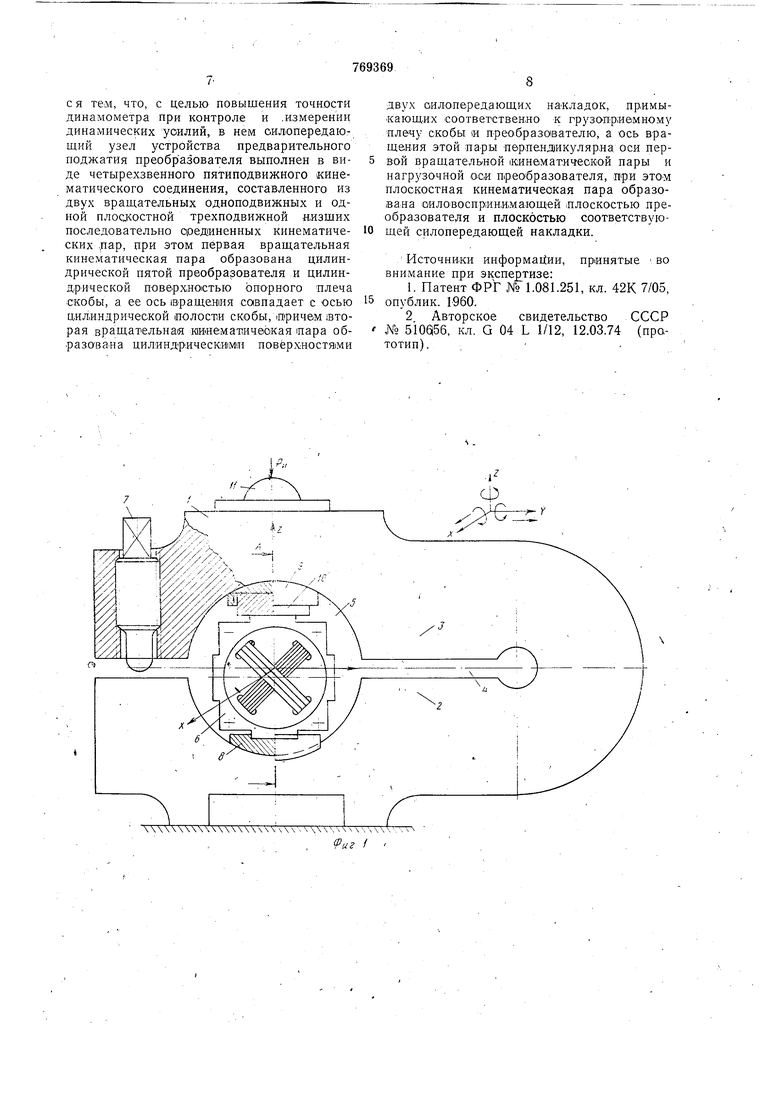
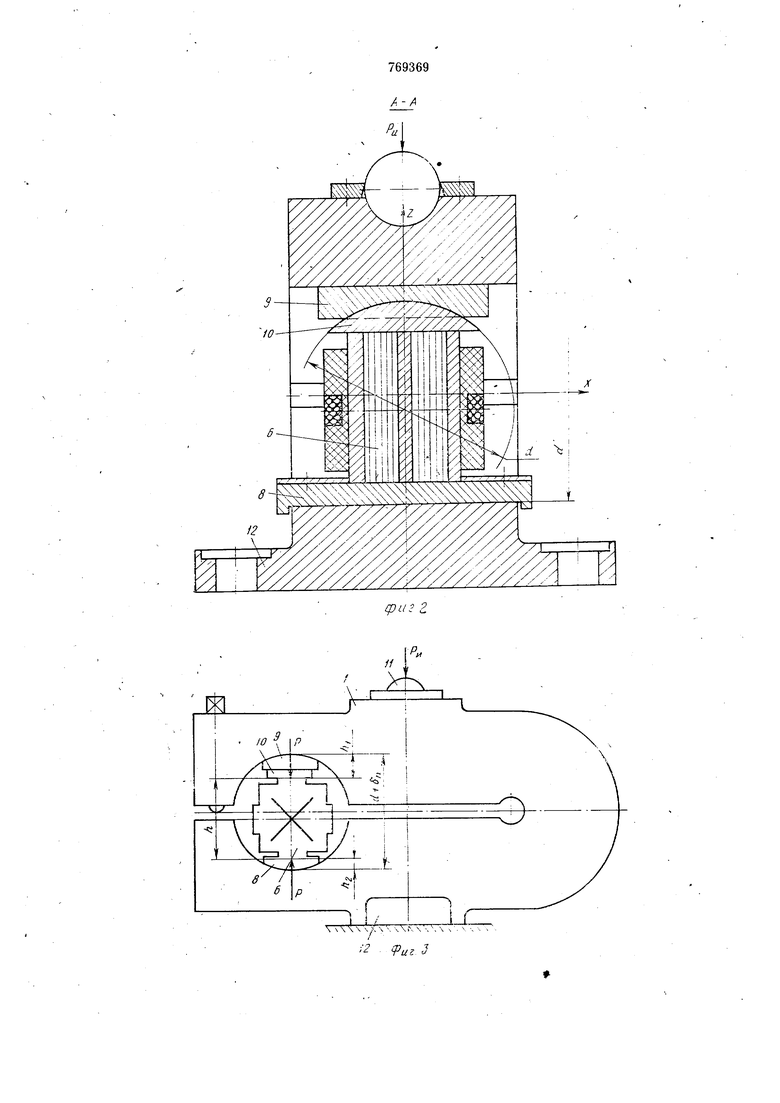
На .фиг. 1 изображен динамометр, ,общий на фиг. 2 - то же, поперечный разрез; на фиг. 3 - вторрй : -вариант выполнения динамо-метра; на фиг. 4 - характеристика магнптоупругого преобразователя с комб,и,Н1Ир01ва.нны1м сер.деч1Ш1ком; на фиг. 5, - деформационная схема динамометра.
Динамометр содержит монолитный корпус 1, выполненный, в виде разомкнутой окобы с опорным и лрузоп рйем ным упругими плечами 2 и 3, разделенными .между собой сквознрй прорезью 4, переходящей в цилиндрическую полость 5 диаметром d. В полости скобы между ее упругими плечами с предварительным натяго м установлен магнитоупругий преобразовательб типа пресс-дуктор с двумя взаимно перпендикулярнььми намагничивающей и измерительной обмотками.,.
Устройство предварительного поджатия магнитоупругого преобразователя состоит из упругого элемента, которым . является разомкнутая скоба, наж/имного винта 7, ввернутого в грузоприемное плечо скобы с
возможностью взаимодействия с ее опорным плечом, и узла силопередачи, установ. ленного в цилиндрической полости скобы.. Силопередающий узел устройства пред5 варительного поджатия магнптоупругого преобразователя выполнено в виде четы.рехзвенного пятиподвижного кинематического соединения, составленного из двух вращательных одноподвижных и одной
0 плоскостной трехподвижной низших последовательно соединенных кинематических пар. Одна вращательная кинематическая пара образована цилиндрической пятой 8 магнитоупругого преобразователя и цилиндрической поверхностью опорного плеча скобы, а ее ось вращения совпадает с геометрической осью X аидиндрической полости скобы, IB -которой установлен преобразователь.
0 Другая вращательная .кинематическая пара образована цилиндрическими поверхностями силопередак щих накладок 9 IK 10, примыкающих соответственно -к грузоприемному плечу скобы и «магнитоупругому
5 преобразователю, а ее ось вращения перпендикулярна соответствующей оси первой вращательной кинематической пары (ось X) и нагрузочной оси Z преобразователя.
Третья плоскостная кинематическая пара образована силовосприниадающей плоскостью магнитоупругого преобразователя и примыкающей плоскостью соответствующей накладки, установленной между преобразователем и верхней накладкой.
5 Грузоприемное плечо скобы снабжено силовоспринимающим шаром 11, через который на динамометр действует контролируемое усилие Р„ . Опорное плечо скобы снабжено плоской подошвой 12 и отверстиями под фундаментные болты, при помощи которых динамометр устанавливается и фиксируется на стойке.
По первому варианту выполнения динамометра силовоспринимающий шар и плоская подошва расположены соосно с нагрузочной осью магнитоупругого преобразователя (фиг. 1 и 2). В результате на преобразователь передается вся измеряемая
0 силовая нагрузка.
По -в.тор01му варианту нагрузочные оси динамометра и магнитоупругого преобразователя смещены друг относительно друга (фиг. 3). Благодаря тому, что нагрузочная
5 ось динамометра .проходит между матнитоупругим преобразователем -и упругим шар ниром, образованным плечами окобы, на
преобразователь передается только часть
измеряемой силы. Этот вариант вьшолне0 ния динамометра предпочтителен при контроле больших усилий, достигающих несколько сотен тонн, поскольку.в этом случае происходит смещение верхнего предела измерения динамометра в сторону боль65 ших значений измеряемой силы.
Динамометр работает следующим образом.
При помощи испытательного стенда снимают выходную характеристику магкятоупругого преобразователя Uz f(P), где t/2- выходное напряжение измерительной обмотки; Р - усилие, сжимающее сердечник преобразователя (фиг. 4).
По приращениям выходного сигнала, на единицу силы определяют линейный участок характеристики преобразователя и соответствующий ему рабочий диапазон измеряемых сил Рf,.
В начале рабочего диапазона с некоторым запасом линейности (перекрытие г.,) на характеристике выбирают точку А, по которой определяют величину предварительного поджатия Р п преобразователя для устранения нелинейности в начальной части его характеристики и соответствующую этому поджатию величину выходного напряжения U Затем рассчетным или экспериментальным путем определяют необходимую величину первоначальной деформации бп упругих плеч окобы, необходИМую для обеспечения требуемого предварительного поджатия РП магнитоупругого преобразователя.
Если известна экспериментальная характеристика & f(P) упругого элемента, которым является скоба, то требуемую первоначальную деформацию бп упругих плеч скобы вдоль нагрузочной оси преобразователя |Можно найти графическиМ .путем, исходя «3 необходимой величины силы предварительного поджатия Р„ магнитоупругого преобразователя (фиг. 4).
Ввертывая в лрузоприемлое плечо 3 .нажимной винт 7 до соприкосновения с опорным, плечом 2, осуществляют упругую деформацию грузоприемного и опорного плеч скобы. Величина этой деформации должна несколько превосходить величину рассчетной деформации. Затем производят установку магнитоупругого преобразователя п силопередающих накладок в цилиндрическую полость скобы При этом суммарная высота преобразователя (И сйлопередающих накладок должна быть равна
d+8n h + hi + h2,
где - требуемая суммарная высота силопередающего узла;
d - диаметр цилиндрической полости;
бл - рассчетная первоначальная реформация упругих плеч скобы нагрузочной оси преобразователя;
Л - высота преобразователя между силовоспринимающими плоскостями;
hi - суМмарная высота верхней и и средней сйлопередающих накладок в сборе; t Ло - высота нижней цилиндрической пяты преобразователя, измеренная между силовоспринимающими поверхностями. Подвижность силонередающего узла, установленного свободно в цилиндрической полости скобы, равна пяти (два линейных установочных перемещения вдоль взаимно перпендикулярных осей X, Y и три угловых установочных перемещения вокруг трех координатных осей X, Y т Z).
Таким образом, оппсанное силонередаюшее кинематическое соединение ограничивает только одно линейное перемещение вдоль вертикальной оси Z, что вызывает необходимость передачи из.меряемой силы РП между звеньями вдоль оси Z.
При вывертывании нажимного винта 7 плеч-и скобы постепенно сближаются между собой, а звенья силопередающего кинематического соединения самоустанавливаются по всем силовоспринимающим поверхностям. После удаления нажимного винта Л1агнитоупругий преобразователь оказывается сжатым рассчетным усилием РП за счет упругих деформаций плеч скобы. Измеряемое усилие РП действует на динамометр через силовоспрпнпмающий щар // и через силоиередающие звенья передается на сердечник магнитоупругого преобразователя, на выходе которого появляется электрический- сигнал, пропорциональный величине этой С11лы.
Данная конструкция силопередающего кинематического соединения обеспечивает равномерный и постоянный характер распределения измеряемой нагрузки в механических контактах между оилопередающими звеньями при любых допускаемых значениях измеряемой силы Р„.
45
Формула изобретения
Динамометр, содержащий корпус, вьчполнен.ный в виде незамкнутой скобы с опорным .и грузопр.иемным плечами, между которыми в цилиндрической полости с .предварительным натягом установлен преобразователь усилия в электрический сигнал, например, магнитоупругий типа прессдуктор, силовоспри.нвмающ1ИЙ щар, .расположенный на грузоприемнам плече скобы, плоскую подощву, расположенную на опорном плече скобы, и устройство предварительного поджатия преобразователя, выполненное в виде нажимно.по винта, размещенного в грузоприемном плече скобы с возможностью взаимодействия с ее опорным плечом, и силопередающего узла, ус,тановленного в цилиндрической полости скобы между ее плечами, отличающийс я тел, что, с целью повышения точности динамометра при контроле и .измерении динамических усилий, в нем оилопередающий узел устройства предварительного поджатия преобразователя выполнен в виде четырехзвенного пятиподвижного кинематического соединения, составленного из двух вращательных одноподвижных и одной плоскостной трехподвижной низших последовательно соединенных кинематических ,пар, при этом первая враш,ательная кинематическая пара образована цилиндрической пятой преобразователя и цилиид-рической поверхностью опорного плеча скобы, а ее ось 1Враш.ен1Ия совпадает с осью цилиндрической полости скобы, оричем ;вторая вращательная К1и«емат1ичеокая тара обpasosafla цилиндрическими поверхностями
двух оилопередающих накладок, прлмыкающих соответствендо к грузаприемному плечу скобы и преобразователю, а ось враше.вия этой пары пбр.пенл)икуляр.на оси первой вращательной кинематической пары и нагрузочной о€,и иреабразователя, при этом плоскостная кинематическая пара образова:на оиловоспр;ин,имающей плоскостью преобразователя и плоскостью соответствующей силопередающей накладки.
Источники информации, принятые во внимание при экспертизе:
2 Авторское свидетельство СССР № 5iOQ56, кл, G 04 L 1/12, 12.03.74 (прототип).
769369
/-И
