(54) ПОЗИЦИОННОЕ РЕГУЛИРУКЯЧЕЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционное регулирующее устройство | 1975 |
|
SU570028A1 |
| Импульсный регулятор | 1980 |
|
SU947824A1 |
| Устройство управления тормозными резисторами генератора | 1983 |
|
SU1094104A1 |
| Адаптивный коммутатор системы телеизмерений | 1980 |
|
SU886032A1 |
| ПОЗИЦИОННОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408271A1 |
| Устройство позиционирования | 1979 |
|
SU798722A1 |
| Устройство для централизованного контроля параметров | 1984 |
|
SU1238040A1 |
| Устройство стабилизации средней частоты шумовых выбросов | 1983 |
|
SU1138951A1 |
| Устройство для передачи и приема дискретной информации | 1990 |
|
SU1807579A1 |
| Линейно-импульсный формирователь | 1974 |
|
SU525236A1 |
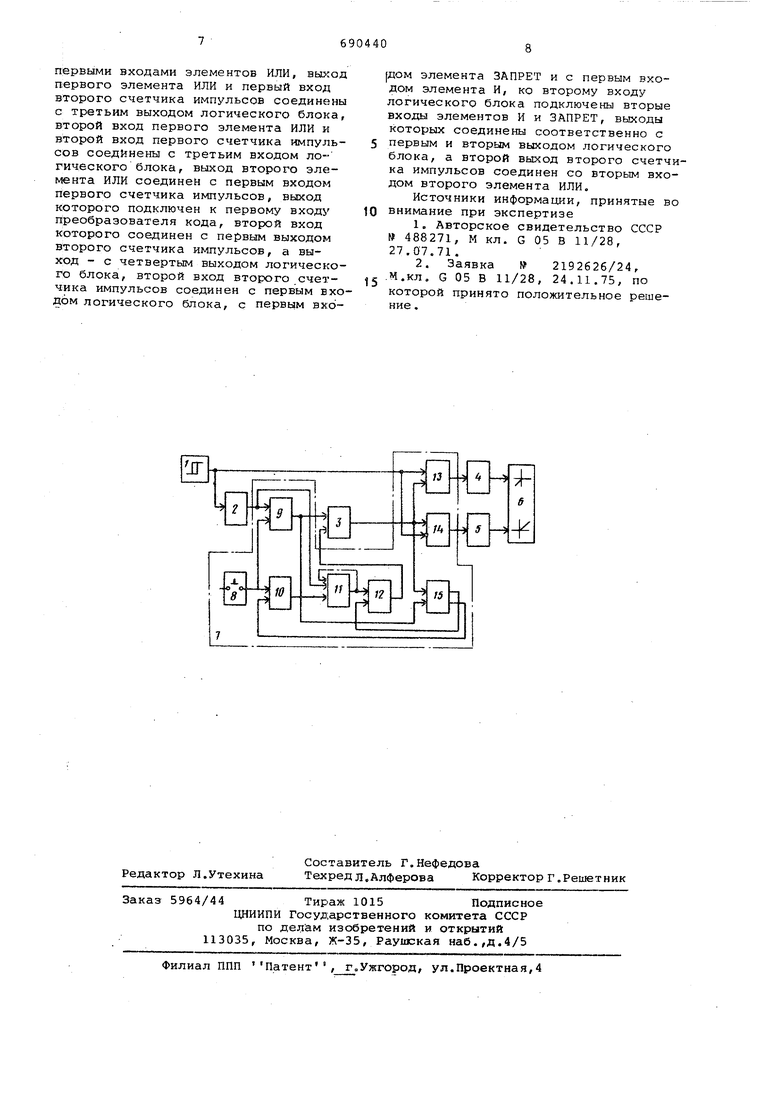
Изобретение относится к области автоматики, а именно к устройствам для автоматического позиционного ре гулирования параметров различньк те нологических процессов и может быть использовано для регулирования температуры, уровня, давления и т.д. Известны устройства аналогичного назначения, в которых генератор импульсов с помощью логического блока обеспечивает управление электрическим исполнительный механизмом 1.. Из известных устройств наиболее близким по технической сущности к :изобретению является позиционное регулирующее устройство 2, содержащее дифференцирующий элемент, под ключенный к аьрсоду датчика сигнала, логический блок, первый и второй выходы которого подключены соответственно через первый и второй усили тели к первому и вторсяяу входам испо нительного механизма, второй вход логического блока подключен к выходу датчика сигнала, а Третий вход :к выходу даФФерен1Щрующего элемента Недостаткети такого устройства является медленное нарастание регулирующего воздействия на объект регу(лирования при пуске системы, при изменении задания устройства или при больших по величине скачкообразньлс возмущениях. Целью изобретения является улучшение динамических характеристик устройства. Эта цель достигается тем, что в предложенное устройство введен генератор импульсов, первый и втсчзой входы которого соединены соответственно с третьим и четвертые выходами логического блока, а выход - с пер&ым входом логического блока, который содержит форсируюдай: элемент, выход которого соединен с первыми входами элементов ИЛИ. Выход первого элемента ИЛИи первый вход второго счетчика импульсов соединены с третьим выходом логического блока. Второй вход первого элемента ИЛИ и второй вход первого счетчика импульсов соединены с третьим входом логического блока, ВЬЕХОД второго элемента ИЛИ соединен с пврвыч входом первого счетчика импульсов, выход которого .подколочен к первому, входу-преобразователя кода, второй вход KOToporo соединен с первым выходом ;второго счетчика импульсов, а выход с четвертьг/1 выходом логического блока. Второй вход второго счетчика импульсов соединен с первым входом логического блока, с первым входом элемента ЗАПРЕТ и с первым входом элемента И. Ко второму входу логического блока подключены вторые входы элементов И и ЗАПРЕТ, выходы которых соединены соответственно с первым и вторым выходами логическог блока, а второй выход второго счет.чика импульсов соединен со вторым входом второго элемента ИЛИ. На чертеже приведена структурная схема позиционного регулирующего устройства. Устройство содержит датчик сигна 1, дифференцирующий элемент 2, гене ратор 3 импульсов дискретно изменяемой длительности, два усилителя 4 и 5, исполнительный механизм 6 и ло гический блок 7. Логический блок 7 содержит форси рующий элемент 8, два элемента ИЛИ 9 и 10, два счетчика импульсов II и 15, преобразователь кода 12, И 13 и элемент ЗАПРЕТ 14. Устройство работает следующим образом. При пуске системы для быстрого вывода регулируемого параметра на заданный уровень необходимо подать на форсирукхций элемент систели 8 внешний сигнал, например, нажатием кнопки, которую содержит элемент включения системы 8, или эамыканием контакта какого-либо командного устройства, если это устройство управляет включением системы. При эт.ом контакт командного устройства должен быть включен параллельно кнрпке, В этом случае на выходе форсирую .щего элемента 8 появляется единичный сигнал, который через элементы ИЛИ 9 и 10 устанавливает счетчики импульсов 11 и 15 в исходное состоя ние и производит ориентирование генератора 3 на выдачу импульса. На выходе счетчика импульсов 11 появляется сигнал, который, пройдя чере преобразователь кода 12, увеличивает длительность импульса выдаваемого генератором 3, до максималь ного значения йгмйкс- Эта максималь ная длительность импульса срответс вует времени полного хода исполнительного механизма . В зависимости от наличия или отсутствия сигнала на выходе датчика сигнала 1 импуль с выхода генератора 3, пройля чере элемент И 13 или элемент ЗАПРЕТ 14 и усилитель 4 и 5, поступает на . один из входов исполнительного мех низма 6, который поворачивает на угол, соответствующий максимальном егулирукадему воздействию на объект егулирования. Кроме того, импульс с выхода генератора 3 переводит счетчик импульсов. 15 из исходного (нулевого) состояния в первое.- . Когда регулируемый параметр достигает заданного значения, датчик сигнала 1 переключается и на выходе дифференцирукяцего элемента 2 появляется импульс, который переводит счетчик импульсов 11 из исходного (нулевого) состояния в первое, через элемент ИЛИ 9 устанавливает счетчик 15 в нулевое состояние и генератор 3 ориентируется на вьадачу второго импульса. Выходной сигнал счетчика импульсов 11 через преобразователь кода 12 .уменьшает длительность импульса генератора 3. на одну ступень. Второй импульс с выхода генератора 3 переводит счетчик 15 из нулевого состояния в первое, а также через элемент И 13 или элемент ЗАПРЕТ 14 и усилитель 4 или 5 поступает на другой вход исполнительного механизма. После прохождения заданного значения под действием максш ального регулирующего воздействия регулиру- емый параметр в течение времени равного эквивалентному запаздыванию в системе, продолжает изменяться в том же направлении, а затем изменяет направление движения. При следунядем переходе через заданное значение снова переключается датчик 1, на выходе дифференцирукнцего элемента появляется импульс, который переводат счетчик 11 во второе состояние, через элемент ИЛИ 9 возвращает счетчик 15 в нулевое состояние и генератор 3 ориентируется на выдачу нового импульса. Сигнал с выхода счет .чика 11 через преобразователь 12 уменыяает длительность импульсов генератора 3 аце на одну ступень. . При каждом последующем пересечении регулируемым параметром заданного значения аналогично длительность импульсов генератора 3 уменьшается на одну ступень, до тек пор, пока не станет равной величине длительности основного импульса. Дальнейшие пер еходы регулируемого параметра через заданное значение не изменяют состояния счетчика 11 (блокировка показана на схеме пунктиром). Длительность основных импульсов генератора 3 выбирается с таким рассчетом, что&л она была достаточной для преодоления отклонений регулируемого параметра, вызванных возкущениями, частота которых соизмерима с частотой автоколебаний. Число ступеней уменьшения дпиЬельности импульсов и величина этих ступеней определяются требованиями к качеству переходного процесса. Если величина регулирукщего воздействия, соответствукадая длител иости основных импульсов, добтаточна (с некоторым запасом), чтобы рег лируемый параметр прошел через заданное значение, то этот переход происходит до вьщачи генератором 3 очередного импульса, так как период следования импульсов на выходе гене ратора 3 устанавливаются при настро ке устройства незначительно превьгаа ющими удвоенное время запаздывания системе. Под очередным импульсом по разумевается импульс, который не в1а ван ориентированием генератора 3. .Если регулирующего воздействия не достаточно для из менения полярности рассогласования (срыв автокол баний) или имеет место значительная асимметрия полуциклов, на вьЬсоде генератора 3 успевает появиться сле дующий импульс, который переводит счетчик 15 из первого состояния (в котором он находится после, предьшущего импульса) во второе и сигнал с выхода счетчика 15 через преобразователь кода 12 уменьшает длительность основного импульса вдвое. При чем этот импульс поступает на тот же вход имполнительного механизма, что и предыдущий основной. Если этот дополнительный (коррекТИР5ПШ1ИЙ) импульс не изменяет полярности рассогласования, то на выходе генератора 3 появляется следующий корректируюпрй импульс (при этом счетчик 15 переходит в следующее состояние, но изменение его выходного сигнала не вызывает изменения длительности этого импульса). Число корректирующих импульсов п (п 1,2 ...), которое должно вызвать изменение знака рассогласования определяется требованиями к качеству парирования устройством низкочастотных (медленно меняющихся) значительных по амплитудам возмущений и характеристиками этих возмущений. Приход п корректирующих импульсов соответствует (п+1)-му состоянию счетчика 15 вследствие того, что перевод счетчика 15 из нулевого состояния в первое вызван основным импульсом. Если п корректирующих импульсов достаточно для пересечения регулируемым параметром заданного значения то сигнал с выхода дифференцирующего элемента 2 через элемент ИЛИ 9 воздействует на вход установки в нулевое состояние счетчика 15 и генератор 3 выдает основные импульсы. Если п импульсов коррекции недостаточно, то на выходе генератора 3 появляется (п-И)-й голпульс и счетчик 15 переходит в состояние п+2, на втором выходе его появляется сигнал, который через элемент ИЛИ 10 устанавливает счетчик 11 в нулевое состояние. Сигнал на выходе счетчика изменяется и tiepes преобразователь 12 увеличивает длительность импульса до Максимального значения. ,В дальнейшем устройство работает как при пуске системы. Если при принудительном снижении амплитуды автоколебаний в процессе пуска произойдет их срыв либо значи ;тельное затягивание того или иного полуцикла по сравнению с Удвоенным временем эквивешентного запаздывания, то счетчик 15 через преобразователь кода 12 устанавливает длительность импульсов генератора 3, половине длительности предыдущего импульса. Таким образом, парирование относительно высокочастотных и небольших по величине возмущений устройство осуществляет по позиционному алгоритму, низкочастотных (медленно меняющихся) возмущений - ПО интегргшьНОМУ, а случайных скачкообразных возмущений значительной величины скачкообразным увеличением модуля регулирующего воздействия до максимального значения с поспедуюЕоим уменьшением его во времени. Предлагаемое устройство по сравнению с известным позволяет получить при пуске системы скорость движения регулируемого параметра к заданному значению максимальной и быстрее парирует случайные, значительные по величине скачкообразные возмущения (например, скачкообразные изменения заданного значения) путем скачкообразного увеличения модуля регулирующего воздействия. Формула изобретения 1.Позиционное регулирующее устройство, содержащее дифференциалывлй элемент, подключенный к выходу датчика сигнала, Логический блок, первый и второй выходы которого подключены соответственно через первый и второй усилители к первому и второму входам исполнительного механизма, второй вход логического блока подключен к выходу датчика сигнала, а третий вход - к выходу дифференцирующего элемента, отличающеея тем, что, с целью улучшения динамических характеристик, устройство одержит генератор импульсов, первый второй входы которого соединены оответственно с третьим и четвертым ыходами логического блока, а выход - первым входом логического блока. 2.Устройство по п. 1, отлиающееся тем, что Б нем лоический блок содержит форсирующий лемент, выкод которого соединеИ с
первыми входами элементов ИЛИ, выход первого элемента ИЛИ и первый вход Второго счётчика импульсов соединены с третьим выходом логического блока, второй вход первого элемента ИЛИ и второй вход первого С ётчйка импульсов соединены с третьим входом логичбского блока, выход второго элемента МЛН соединен с первым входом первсэгр счетчика импульсов, выход которого подключен к первому входу преобразователя кода, второй вход которого соединен с первым выходом второго счетчика импульсов, а выход - с четвертым выходом логического блока, второй вход второго счетчика импульсов соединен с первым входом логического блока, с первым вхоцом элемента ЗАПРЕТ и с первым входом элемента И, ко второму входу огического блока подключены вторые входы элементов И и ЗАПРЕТ, выходы которых соединены соответственно с первым и вторым выходом логического блока, а второй выход второго счетчика импульсов соединен со вторым входом второго элемента ИЛИ.
Источники информахщи, принятые во внимание при экспертизе
которой принято положительное решение ..
