1
Изобретение относится к устройствам для автоматического позиционного регулирования различных технологических величин, например, для регулирования плотности и уровня суспензий и пульп на углеобогатительных фабриках.
Известны позиционные регулирующие устройства, содержащне генератор импульсов, логический блок, два усилителя, выходы которых соединены с соответствующими входами исполнительного механизма, подключенного через регулирующий орган к объекту регулирования, выход которого через датчик подключен к позиционеру.
Однако в таких устройствах независимо от величины ощибки скорость перемещения иснолнительиого механизма остается постоянной. При этом для объектов с большой чувствительностью к возмущениям перерегулирование может достигать значительной величины, что ограничивает область применения простых и дешевых нозиционных регулирующих устройств. Кроме того, применяемые устройства содержат контактные элементы, снижающие их надежность.
Целью изобретения является повышение качества регулирования (уменьшение величины неререгулирования) и увеличение надежности устройства в работе.
Это достигается тем, что устройство содержит дополнительный генератор импульсов, первый и второй входы логического блока соединены с соответствующими выходами позиционера, третий вход логического блока соединен с выходами генераторов имнульсов, входы которых подключены соответственно к первому и второму выходам логического блока, третий и четвертый выходы которого
соединены с входами соответствующих усилителей.
Логический блок содержит схему «ИЛИ, первый вход которой соединен с первыми входами логического блока и первой схемы
«ЗАПРЕТ, второй вход которой подключен ко второму входу логического блока и первому входу схемы «И, второй вход которой соединен с выходом схемы «ИЛИ, с первым входом второй схемы «ЗАПРЕТ и с анодом
нервого диода, выход схемы «И соединен со вторым входом схемы «ИЛИ, выход первой схемы «ЗАПРЕТ подключен к первому выходу логического блока и через первую схему «ИЕ - к его второму выходу, второй вход
второй схемы «ЗАПРЕТ подключен к третьему входу логического блока и к аноду второго диода, катоды диодов через вторую схему «ИЕ соединены с третьим выходом логического блока, четвертый выход которого подключей к выходу второй схемы «ЗАПРЕТ
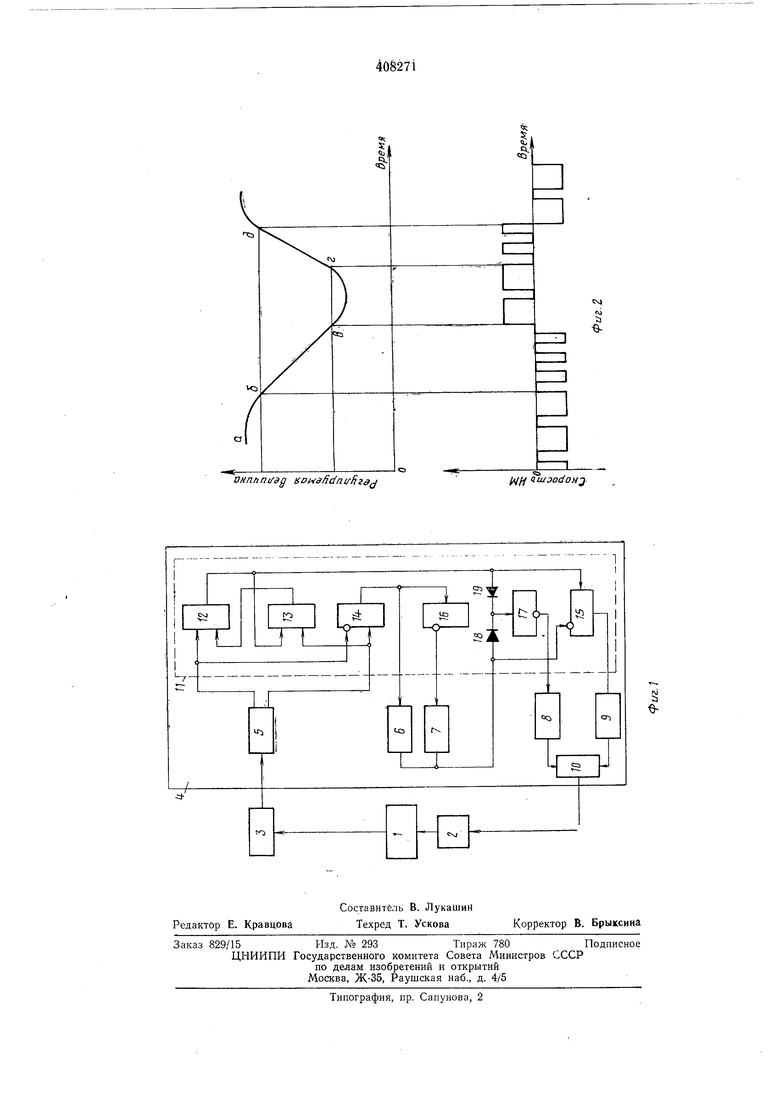
На фиг. I представлена блок-схема предложенного позиционного регулирующего устройства; на фиг. 2 - диаграмма его работы.
Блок-схема системы содержит объект регулирования 1, регулирующий орган 2, датчик 3 и позиционное регулирующее устройство 4, состоящее из позиционера 5, генераторов импульсов б и 7, усилителей 8 и 9, исполнительного механизма 10 и логического блока 11, в состав которого входят схема «ИЛИ 12, схема «И 13, схемы «ЗАПРЕТ 14 и 15, схемы «НЕ 16 и 17, диоды 18 и 19.
Если регулируемая величина нревыщает заданный верхний предел (участок а-б на фиг. 2), с позиционера 5 поступают сигналы на схемы 12 и 14. Наличие сигнала запрета на схеме 14 приводит к появлению сигнала на выходе схемы «НЕ 16. Этот сигнал запускает генератор импульсов 7, выходной сигнал которого подается на схему 15, с выхода которой на вход усилителя 9 поступают сигпалы определенной длительности и частоты.
Исполнительный механизм 10 перемещает регулирующий орган 2 с повыщенной скоростью в направлении уменьшения регулируемой величины. В это время па усилитель 8 сигнал не поступает, так как па вход схемы «НЕ 17 через диод 19 поступает сигнал со схемы «ИЛИ, реализующей совместно со схемой «И функцию «ИАМЯТЬ.
Как только регулируемая величина установится ниже верхнего заданного предела {участок б-0 на фиг. 2), сигнал, поступающий с позиционера 5 на схему «ИЛИ, исчезнет, однако на выходе этой схемы сигнал останется вследствие действия функции «НАМЯТЬ. При этом снимается запрет со схемы 14, что приводит к появлению сигнала на выходе генератора 6 с регулируемой частотой и длителыюстью импульсов и к снятию сигнала на выходе генератора 7. В результате изменяются частота и длительность импульсов, поступающих через усилитель 9 на исполнительный механизм. Исполнительный механизм продолжает перемещаться в прежнем нанравлении с меньщей скоростью, обусловленной параметрами настройки генератора 6.
При уме 1ьшении регулируемой величины ниже нижнего заданного предела (участок в-г на фиг. 2) снимается сигнал со входов схе.м 13 и 14, что приводит к снятию сигналов с выходов схем 12, 13, 14 и 15 и к появлению сигнала на выходе схемы 16, который приводит к запуску генератора 7. С выхода генератора 7 через диод 18 сигнал подается на вход схемы 17 и затем через усилитель 8 - на вход исполнительного механизма. При этом изменяются частота и длительность импульсов и направление движения исполнительного механизма. Последний перемещает с повыщенной скоростью регулирующий орган 2 в направлении увеличения регулируемой величины.
Таким образом, при нахождении регулируемой величины в заданных пределах предлагаемое устройство обеспечивает перемещение исполнительного механизма, а следовательно, и регулирующего органа, в импульсном режиме на пониженной скорости, а при отклонении от установленных пределов происходит реверс исполнительного механизма и увеличение скорости его перемещения. Выбор параметров настройки генераторов импульсов позволяет получить оптимальную скорость иснолнительного механизма при различных значениях регулируемой величины. Такой режим работы повыщает качество регулирования (уменьшает величину перерегулирования), а реализация устройства на бесконтактных логических элементах повышает надежность работы системы регулирования.
Предмет изобретения
1.Позиционное регулирующее устройство, содержащее генератор импульсов, логический блок, два усилителя, выходы которых соединены с соответствующими входами исполнительного механизма, подключенного через регулирующий орган к объекту регулирования, выход которого через датчик подключен к позиционеру, отличающееся тем, что, с целью повышения качества регулирования и надежности устройства в работе, оно содержит дополнительный генератор импульсов, первый и второй входы логического блока соединены с соответствующими выходами позиционера, третий вход логического блока соединен с выходами генераторов импульсов, входы которых подключены соответственно к первому и второму выходам логического блока, третий и четвертый выходы которого соединены с входами соответствующих усилителей.
2.Устройство по п. I, отличающееся тем, что логический блок содержит схему «ИЛИ, первый вход которой соединен с первыми входами логического блока- и первой схемы «ЗАПРЕТ, второй вход которой подключен ко второму входу логического блока и первому входу схемы «И, второй вход которой соединен с выходом схемы «ИЛР1, с первым входом второй схемы «ЗАПРЕТ и с анодом первого диода, выход схемы «И соединен со вторым входом схемы «ИЛИ, выход первой схемы «ЗАПРЕТ подключен к первому выходу логического блока и через первую схему «НЕ - к его второму выходу, второй вход второй схе.мы «ЗАПРЕТ подключен к третьему входу логического блока и к аноду второго диода, катоды диодов через вторую схему «НЕ соединены с третьим выходом логического блока, четвертый выход которого подключен к выходу второй схемы «ЗАПРЕТ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционное регулирующее устройство | 1975 |
|
SU570028A1 |
| Позиционное регулирующее устройство | 1977 |
|
SU690440A1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| Импульсный регулятор | 1980 |
|
SU947824A1 |
| Многоканальный регулятор | 1979 |
|
SU851334A2 |
| Устройство для регулирования толщины сырца | 1976 |
|
SU651322A1 |
| Полупроводниковый регулятор напряжения электрического генератора | 1979 |
|
SU900399A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416935A1 |
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Система автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме | 1983 |
|
SU1232514A1 |
nnnnnifag KDnafidni/Ri&ij
NJ
PO Й 4ujyodo i
