(54) ПОЗИЦИОННОЕ РЕГУЛИРУЮЩЕЕ УСТЮЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционное регулирующее устройство | 1977 |
|
SU690440A1 |
| Импульсный регулятор | 1980 |
|
SU947824A1 |
| ПОЗИЦИОННОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408271A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416935A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Цифровая следящая система регулирования | 1976 |
|
SU673986A1 |
| ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2643179C1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
Изобрете1дае относится к области автоматики, а именно к устройствам для автоматического позиционного регулирования параметров различных технологических процессов и может быть использовано во всех отраслях народного хозяйства для регулирования температуры, уровня, давления и т.д.
Известны регулирующие устройства, работающие с злектрическим исполнительным механизмом, который перемещается со скоростью, определяемой отклонением регулируемого параметра от заданного значения, что соответствует интегральному закону регулирования, отличающемуся неустойчивостью и приводящему в системах регулирования с большим запаздыванием к недопустимому перерегулироват1ю. Стремление снизить амплитуды автоколебаний приводит к уменьшению средней скорсюти отработки сигнала, а это при непрерьшно действующих на систему случайных возмущениях ухудшает способность системы к парированию возмущений 1 , 2.
Н;1иболес близким к изобретению по технической сущности является регулирующее устройство, содержащее генераторы импульсов, выходы которых подключены к первому входу логического
ока, второй вход которого соединен с датчиком сигнала, первый и второй выходы логического блока подключены соответственно через первый и второй усилители к первому и второму входам j исполнительного механизма 3.
Недостатком данного устройства является то, что вне пределов зоны нечувствительности регулирующее воздействие остается постоянным независимо от величины возмущения, а зто при боль0 щом запасе по регулирующему воздействию и больншх залаздьшаниях может привести к больщой амплитуде автоколебаний или к срьшу автоколебании при малом запасе по регулирующему воздействию.
8Целью изобретения является повьщ1ение точностн и надежности устройства.
Достигается зто благодаря тому, что в известное устройство дополнительно введены инвертор и дифферешщрующий элемент, причем выход датчика сигнала через дифференцирующий элемент подключен к первым входам первого и второго генераторов импульсов и к третьему входу логического блока, третий выход которого соединен с вторым входом второго генератора импульсов и через инвертор - с вторым входом первого генератора импульсов. Кроме того, логический блок содержит элементы И, Запрет и счетчик импульсов, к первому входу которого и первым входам элементов И и Запрет подключен первый вход логического блока, второй вход которого соединен с вторыми входами элементов И и Запрет, третий вход логического блока соединен с вторым входом счетчика импульсов, а выходы элементов И, Запрет и счетчика импульсов соединены соответственно с первым, вторым и третьим выхода ш логического блока.
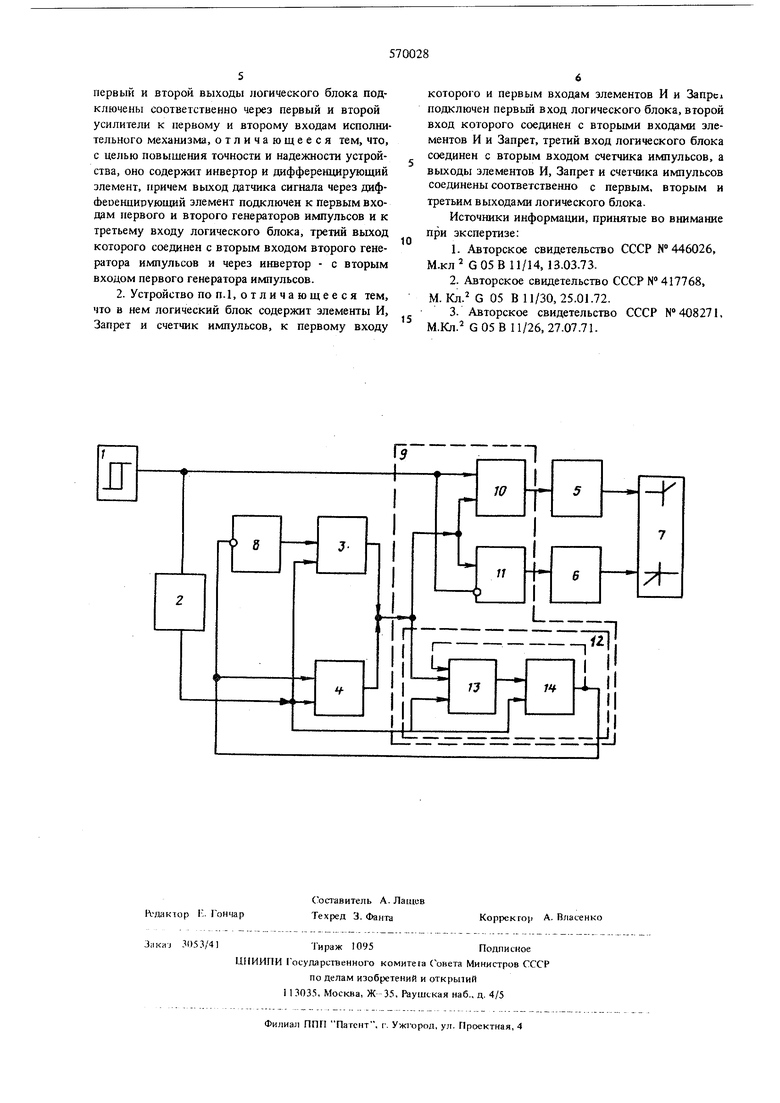
На юртеже П шедена структурная схема позиционного регулирующего устройства.
Устройство содержит датчик сигнала 1, дифференцируинций элемент 2, даа генератора и шульсоа 3 и 4, два усилителя 5 и 6, испопнительиый механизм, инверторе, логический блок 9, который содержит элементы И 10, Запрет 11 и счетчик импульсов 12 на двух т{жггерах 13 и 14.
бота устройства происходит следующим образом. В момент, когда регухшруемый параметр проходит через заданиое значение, выходной сигнал датчика 1 скачком изменяет свое значение. Импульс, возникающий при этом иа выходе даФФ рснцирукшдего элемента 2, устанавливает счетчик 12 на триггерах 13 и 14 в исходное состояние и одновременно ориентирует генераторы 3 и 4 таким образом, чтобы при последукнцем поступлении на их вход единичного сигнала генерация начиналась с выдачи импульса. При этом начинает свою работу генератор 3, иа вход которого поступает разрешающий сигнал с выхода инвертора 8. Выданный генератором 3 иыкульс заданной длительности At проходит через элементы И10 или Запрет 11 ( в зависимости от наличия или отсутствия сигнала на в 1ходе датчика сигнала) иа вход соответствующего усилителя (5 или 6), управляющего работой исполнительного механизма 7. Кроме того, этот импульс опрокидывает триггер 13 счетчика импульсов 12, устанавливая его в положение, соответствующее 1 на его вькоде. Исполнительный механизм 7 повора швается на некоторый угол, обеспечивающий регулирующее воздействие, направленное в сторону ликвидащ1и возникщего рассогласования между регулируемым параметром и его заданным значением. Величина этого воздействия (длительность импульса At . выдаваемого генератором импульсов 3) выбирается с таким расчетом, чтобы она была достаточной для преодоления отклонений регулируемого параметра, вызванных возмущениями, частота которых ссжзмерима с частотой автоколебаний (практически ниже последней в несколько раз).
После прохода через заданное значение регулируемый параметр в течение отрезка времени, равного эквивалентному запаздьшанию в системе, будет продолжать изменяться в прежнем направлении, а затем, пройдя через максимум, начнет движение к заданному значению под действием упомянутого выше регулирующего воздействия.
Если величина этого сигнала достаточна (с некоторым запасом) для того, чтобы заставить регулируемый параметр пройти через заданное значение, то этот переход произойдет до выдачи генератором 3 очередного импульса: периоды следования импульсов на выходе генераторов 3 и 4 устанавливаются при настройке регулирующего устройства равными или незначительно превышающими удвоенное время запаздьюания в системе. При переходе регулируемого параметра через заданное значение генераторы 3 и 4 и триггеры 13 и 14 счетчика 12 окажутся вновь ориентированными в исходное состояние, после чего описанный процесс повторится с тем отличием, что теперь будет работать другой усилитель. Таков нормальный алго1ЖТМ функционирования устройства.
Если регулирующего воздействия недостаточно для изменения полярности рассогласования (срыв автоколебаний), либо имеет место значительная
асимметрия полуциклов, на выходе генератора импульсов 3 успевает появиться второй импульс. Этот импульс опрокидьшает триггер 14 счетчика 12 в результате чего происходит переключение с генератора 3 на генератор 4. Счетчик импульсов 12 вьшолнен с блокировкой (показана на чертеже пунктиром), препятствующей поступлению на его вход продвигающих импульсов после опрокидьшания триггера 14. Генератор 4 корректирующих импульсов длительностью Ate At будет работать до тех
пор, пока регулируемый параметр вновь не достигнет заданного значения, после чего произойдет новое переключение на генератор импульсов 3.
Таким образом, парирование относительно высокочастотных и небольших по величине возмущеНИИ устройство осуществляет по позиционному ал-. горитму, а низкочастотных (значительных по амплитудам) - по интегральному.
Использование предлагаемого устройства обеспечивает по сравнению с известным устройством
следующие преимущества:
повышение точности (уменьшение алшлитуд ав- . токолебаний) за счет выбора основного регулирующего воздействия небольшой величины, достаточной для парирования относительных высокочастотных и небольших по величине возмущений;
повышение надежности (устойчивости работы) при больших по амплитудам низкочастотных возмущениях вследствие того, что дополнительно, кроме основного регулирующего воздействия, будет
формироваться корректирующее воздействие, которое обеспечит парирование указанных возмущений.
Формула изобретения
первый и второй выходы логического блока подключены соответственно через первый и второй усилители к первому и второму входам исполнительного механизма, отличающееся тем, что, с целью повышения точности и надежности устройства, оно содержит инвертор и дифференцирующий элемент, причем выход датчика сигнала через диф(Ьеоениирующий элемент подключен к первым входам первого и второго генераторов импульсов и к третьему входу логического блока, третий выход которого соединен с вторым входом второго генератора импульсов и через инвертор - с вторым входом первого генератора импульсов.
которого и первым входам элементов И и 3anpci подключен первый вход логического блока, второй вход которого соединен с вторыми входами элементов И и Запрет, третий вход логического блока соединен с вторым входом счетчика импульсов, а выходы элементов И, Запрет и счетчика импульсов соединены соответственно с первым, вторым и третьим выходами логического блока.
Источники информации, принятые во внимание при экспертизе:
М. Кл. G 05 В 11/30,25.01.72.
