(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| ВНУТРИТРУБНЫЙ МАНИПУЛЯТОР | 1990 |
|
SU1739729A1 |
1
Изобретение относится к области машиностроения, в частности для дистанционной работы в дробеструйной камере.
Известны Манипуляторы для дистанционной работы в камерах с агрессивньЫи средами установленные в стенках камеры с возможностью возвратнопоступательного пер1емещения tl .
Известный манипулятор не имеет уравновешивающего механизма, что затрудняет работу оператора в крайнем выдвинутом положении исполнительного органа манипулятора.
Известны также манипуляторы, снабженные уравновешивающим, пружинным механизмом 2,
Однако этот уравновешивающий механизм обеспечивает уравновешивание момента, возникающего лишь при изменении угловой координаты исполйительного органа.
Целью изобретения является изменение уравновешивающег.о уси.г1ия при сме щении исполнительного органа вдоль продольной оси.
Указанная цель достигается тём, чхо уравновешивающий механизм выполнен в виде спиральной пружины, внутpJaнний конец которой закреплен на
оси поворотного рычага, имеющего профильный паз, в котором размещён ролик, расположенный на штанге, связанной с исполнительным органом.
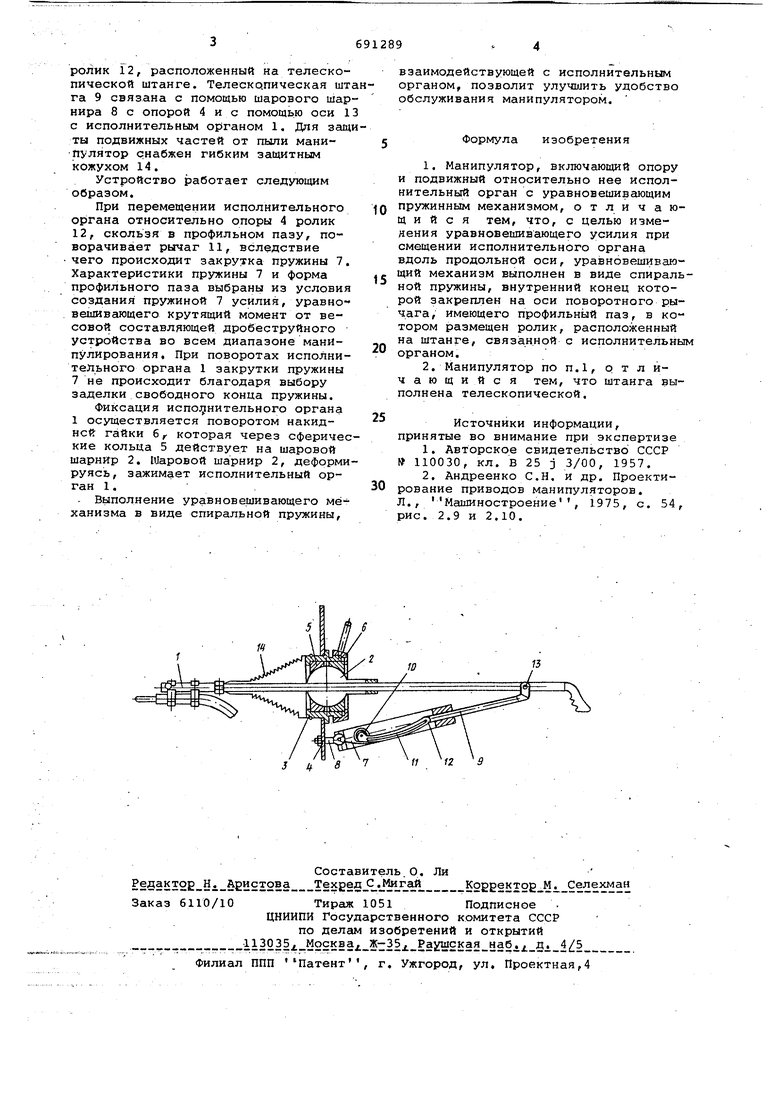
.На чертеже изображен манипулятор, продольный разрез.
Исполнительный орган 1 помещен в шаровом шарнире 2, обо.йма 3 которого расположена в опоре 4. Такое выпол0нение позволяет осуществлять повороты и поступательное перемещение исполнительного органа 1 в шаровой шарнире 2. Шаровой шарнир 2 выполнен в виде разрезной цанги, охватывающей
5 исполнительный орган 1, и опирается .на два сферических кольца 5, размещенных в обойме 3. Накидная, гайка 6, связанная с обоймой 3, может фиксировать исполнительный opfaH 1 в
0 любой точке зоны обслуживания.
Спиральная пружина 7 предназначена для создания усилия, уравновешивающего крутящий момент от весовой составляющей исполнительного органа 1.
5 Один конец пружины 7 входит в радиальное коническое отверстие шарового шарнира 8 телескопической штанги 9, другой конец закреплен на оси 10 поворотного рычага 11 с профильным пазом.
0 в профильный паз рычага 11 установлен ролик 12, расположенный на телеско пической штанге. Телескопическая ш га 9 связана с помощью шарового шар нира 8 с опорой 4 и с помощью оси с исполнительным органом 1. Для защ ты подвижных частей от пыли манипулятор снабжен гибким защитным кожухом 14. Устройство работает следующим образом. При перемещении исполнительного органа относительно опоры 4 ролик 12, скользя в профильном пазу, поворачивает рычаг 11, вследствие чего происходит закрутка пружины 7 Характеристики пружины 7 и форма профильного паза выбраны из условия создания пружиной 7 усилия, уравновешивающего крутящий момент от весовой составляющей дробеструйного устройства во всем диапазоне манипулирования. При поворотах исполнительного органа 1 закрутки пружины 7 не происходит благодаря выбору заделки свободного конца пружины. Фиксация исполнительного органа 1 осуществляется поворотом накидной гайки 6f которая через сферичес кие кольца 5 действует на шаровой шарнир 2, Шаровой шарнир 2, деформи руясь, зажимает исполнительный орган 1, - Выполнение уравновешивающего мёханизма в виде спиральной пружины.
J V в 7 V 42 5
73 взаимодействующей с исполнительным органом, позволит улучидить удобство обслуживания манипулятором, Формула изобретения 1.Манипулятор, включающий опору и подвижный относительно нее исполнительный орган с уравновешивающим пружинным механизмом, отличающийся тем, что, с целью изменения уравновешивающего усилия при смещении исполнительного органа вдоль продольной оси, уравновешивающий механизм выполнен в виде спиральной пружины, внутренний конец которой закреплен на оси поворотного рычага, имеющего профильный паз, в котором размещен ролик, расположенный на штанге, связанной с исполнительным органом, 2.Манипулятор по п,1, о т л ичающийся тем, что штанга выполнена телескопической. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 110030, кл. В 25 j 3/00, 1957, 2.Андреенко С.Н. и др. Проектирование приводов манипуляторов, Л,,Машиностроение, 1975, с. 54, рис, 2.9 и 2.10,
