Изобретение относится к устройствам, которые закрепляются по внутренней поверхности трубопроводов или перемещаются в них с целью доставки к участку производства работ приспособлений для зачистки внутренней поверхности трубопроводов, приборов неразрушающего контроля, ремонтного оборудования, например, сварного или резательного механизма центрирования и закрепления внутритрубных манипуляторов в обслуживаемом трубопроводе или иной внутренней полости цилиндрической формы.
Известны внутритрубные манипуляторы, механизм закрепления которых в трубопроводе содержит радиально-подвижные элементы, которые контактируют с клиновыми поверхностями и при их осевом перемещении от привода зажима устанавливаются в упор к внутренней поверхности трубопровода.
Величина радиального перемещения вышеуказанных зажимных элементов невелика, что не позволяет использовать манипуляторы с такими зажимными механизмами в трубопроводах со значительными изменениями внутреннего диаметра.
Известно устройство для перемещения в трубопроводе, включающее несущую раму с движителем и опорную штангу, выполненную в виде двуплечего рычага с подпружиненным роликом на конце, и механизм подъема штанги, который состоит из двигателя, кинематически связанного через зубчатую и винтовую пары с пинолью, на которой закреплена опора для пружины сжатия, контактирующей со свободным концом штанги. При перемещении в трубопроводе с изменяющимся внутренним диаметром ролик отслеживает поверхность, при этом усилие прижатия ролика колеблется в связи с изменением величины деформации пружины. Посредством изменения положения нижней опоры пружины сжатия возможна предварительная настройка устройства на определенный внутренний диаметр трубопровода или изменение усилия поджатия ролика.
Однако существует общественная потребность создание надежного трубного манипулятора для цилиндрической полости большого диаметра, доступ в которую осуществляется через горловину малого диаметра, причем диаметр цилиндрической полости переменный. Применительно к этой задаче указанное устройство имеет недостатки: а именно, необходимое условие для прохода этим устройством горловины небольшие поперечные размеры собственно тележки и длинная опорная штанга.
Однако при перемещении в трубопроводе изменяющегося диаметра точка контакта ролика длинной рычажной штанги с поверхностью трубопровода значительно изменяет свое положение вдоль продольной оси устройства и может оказаться в осевом направлении за опорами движителя. Это создает неблагоприятную раскладку сил, воздействующих на устройство, что снижает его надежность. При опускании штанги на большой угол увеличиваются продольные размеры устройства, чем снижается возможность прохождения гибов.
Целью изобретения является повышение надежности манипулятора, предназначенного для работы в естественных условиях.
Поставленная цель достигается тем, что во внутритрубном манипуляторе, включающем несущую раму с движителем и опорную штангу, выполненную в виде двуплечего рычага с подпружиненным роликом, и механизм подъема штанги, включающий приводную винтовую пару, гайка которой установлена с возможностью перемещения, шарнир двуплечего рычага закреплен непосредственно на гайке, а его плечо, несущее ролик, выполнено телескопическим из двух секций и пружина установлена между секциями, причем подвижная секция электрически связана с приводом вращения винта, а свободный конец штанги контактирует с профильным кулачком, установленным на несущей раме.
При этом для прохождения узкой горловины манипулятору обеспечивается минимальный поперечный размер, причем гайка с шарниром закрепления штанги находится в крайнем нижнем положении на винте, а сама штанга приведена в крайнее угловое положение ее поворотом, определяемым конфигурацией и расположением профильного кулачка. При прохождении по трубопроводу большого и при этом изменяющегося в широком диапазоне диаметра опорный ролик, отслеживания изменение диаметра, перемещается перпендикулярно продольной оси устройства, т.е. осевая координата ролика не изменяется, тем самым сохраняется оптимальная раскладка сил, воздействующих на манипулятор.
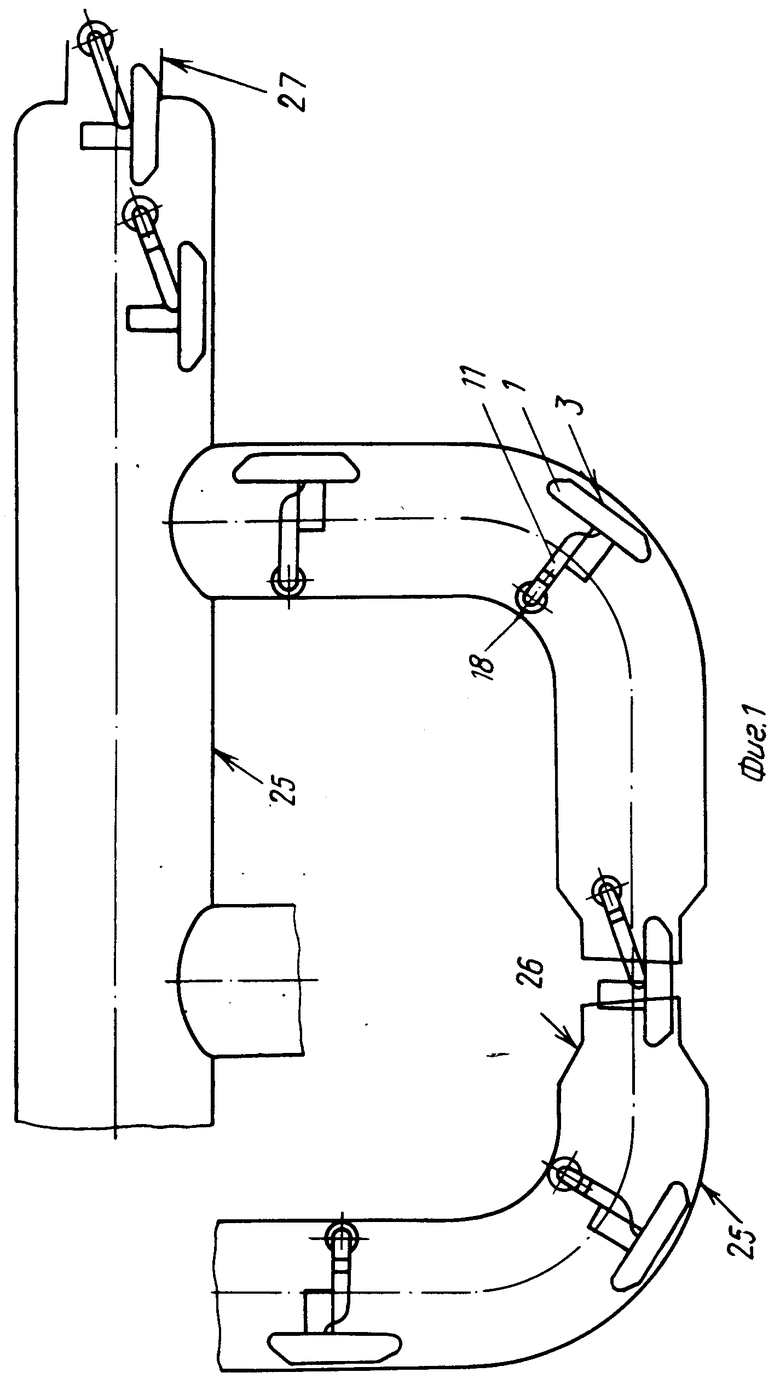
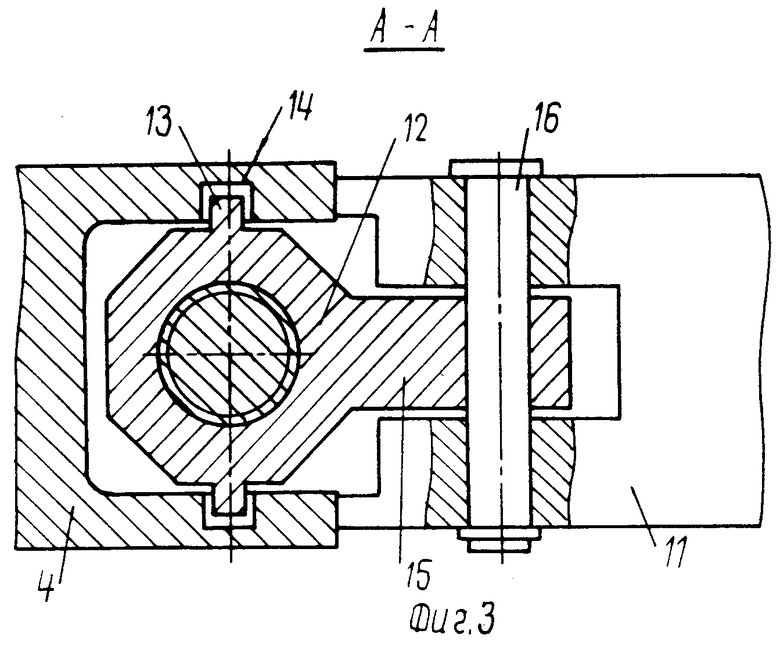
На фиг. 1 схематично представлены различные положения манипулятора в трубопроводе с вертикальными участками, гибами, изменениями внутреннего диаметра и с узкой горловиной; на фиг.2 манипулятор (пунктиром показана штанга в верхнем положении); на фиг.3 сечение А-А на фиг.2.
Внутритрубный манипулятор 1 содержит несущую раму 2 с гусеничными движителями 3. На несущей раме 2 закреплена стойка 4, в которой перпендикулярно к опорной плоскости гусеничного движителя 3 в подшипниках 5 установлен ходовой винт 6, который посредством пары зубчатых колес 7 и 8 связан с приводом 9 механизма 10 подъема опорной штанги 11. На винте 6 размещена гайка 12, на наружной поверхности которой спрофилированы выступы 13, а на стойке 4 имеются ответные направляющие пазы 14. Гайка 12 имеет проушину 15 для шарнира 16 штанги 11. Штанга 11 представляет собой двуплечий рычаг, закрепленный в проушине 15 посредством оси 16 на гайке 12. Свободный конец штанги 11 снабжен щупом 17, а другой несет ролик 18 и выполнен из двух взаимно подвижных, телескопически соединенных секций: неподвижной секции 19 и подвижной секции 20, которые распираются пружиной 21. На раме 2 закреплен профильный кулачок 22, контактирующий со щупом 17. Подвижная секция 20 соединена с подвижным контактом 23 реостатного датчика 24, который включен в схему управления приводом 9. Манипулятор 1 предназначен для диагностирования трубопровода 25, который имеет переменный диаметр: ступени 26 и горловину 27.
Манипулятор работает следующим образом.
Для введения во внутреннюю полость трубопровода 25 через горловину 27 штангу 11 с опорным роликом 18 опускают в крайнее нижнее положение (см. фиг. 2), добиваясь наименьшего поперечного размера манипулятора 1. Для этого включают привод 9 механизма 10 подъема штанги 11, винт 6 вращается, а гайка 12 перемещается по винту 6 в крайнее нижнее положение. Щуп 17 штанги 11 при этом постоянно упирается в профильный кулачок 22, который определяет пространственное положение штанги 11. В крайнем положении штанга 11 не выступает за габарит стойки 4 и позволяет манипулятору 1 вводиться через горловину 27 в трубопровод 25. Затем привод 9 включается реверсивно, при этом гайка 12 переходит в другое крайнее положение. При движении гайки 12 вниз шарнирно закрепленная штанга 11, упираясь щупом 17 в профильный кулачок 22, устанавливается в крайнее положение. Угловое положение штанги 11 определяется взаимным положением оси 16 и профильного кулачка 22, а также конфигурацией кулачка 22, которые подобраны так, чтобы осевая координата ролика 18 в положении упора располагалась не за пределами опоры движителя (см. фиг. 2, положение штанги, обозначенное пунктиром). Рабочее положение штанги 11 вертикальное. Ролик 18 прижимается к внутренней поверхности трубопровода 25 пружиной 21. Наличие двух противолежащих опор гусениц 3 и ролика 18, распираемых в двух противоположных направлениях пружиной 21, обеспечивает перемещение манипулятора 1 также и на вертикальных участках трубопровода 25. Если диаметр трубопровода 25 колеблется (см. ступень 26), штанга 11 уменьшается, преодолевая пружину 21, или увеличивается на величину полупрозрачности диаметров трубопровода (в районе ступени 26). При этом колеблется усилие пружины 21, т.е. заменяется сила разжатия манипулятора 1 в трубопроводе 25. Если величина сжатия пружины 21 и, как следствие, сила разжатия манипулятора 1 превысит предельно допустимые величины наибольшую и наименьшую предельно допустимые значения схема управления, получив соответствующий сигнал от реостатного датчика 24, дает сигнал на включение привода 9, гайка 12 перемещается по винту 6, пружина 21 сжимается или расслабляется в зависимости от знака рассогласования. Участок профильного кулачка 22, соответствующий этому участку перемещения гайки 12, спрофилирован так, что ролик 18 получает только радиальное перемещение и не меняет своей осевой координаты, лишь при крайнем нижнем положении гайки 12 профиль кулачка позволяет штанге 11 изменить свое угловое положение, т.е. сложиться.
Изобретение позволяет повысить надежность манипуляторов, предназначенных для перемещения в трубопроводах большого и при этом изменяющегося диаметра, при доступе во внутреннюю полость через горловину малого диаметра.
Повышенная надежность позволяет использовать предлагаемый манипулятор на объектах атомной энергетики или на других объектах с аналогичными высокими требованиями к надежности и работоспособности для выполнения диагностических или ремонтных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1976 |
|
SU599873A2 |
| Кантователь | 1973 |
|
SU510285A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| МОЙКИ СТЕКЛЯННЫХ БАНОК | 1970 |
|
SU265742A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Машина для контактной стыковой сварки | 1981 |
|
SU1337216A1 |

Использование: для доставки к участку производства работ приспособлений для зачистки внутренней поверхности трубопроводов. Сущность изобретения: опорная штанга выполнена в виде двуплечего рычага с подпружиненным опорным роликом. Механизм подъема штанги содержит приводную винтовую пару, гайка которой установлена с возможностью перемещения. На несущей раме с движителем установлен профильный кулачок. Двуплечий рычаг шарнирно закреплен непосредственно на гайке и выполнен в виде двух взаимно подпружиненных и телескопически соединенных подвижной и неподвижной секций. На подвижной секции установлен опорный ролик, и она электрически связана с приводом вращения винтовой пары. Неподвижная секция снабжена щупом, контактирующим с кулачком. 3 ил.
ВНУТРИТРУБНЫЙ МАНИПУЛЯТОР, содержащий несущую раму с движителем, опорную штангу, выполненную в виде двуплечего рычага с подпружиненным опорным роликом, и механизм подъема штанги, включающий приводную винтовую пару, гайка которой установлена с возможностью перемещения, отличающийся тем, что, с целью повышения надежности манипулятора при работе в стесненных условиях, на несущей раме установлен профильный кулачок, двуплечий рычаг шарнирно закреплен непосредственно на гайке и выполнен в виде двух взаимно подпружиненных и телескопически соединенных подвижной и неподвижной секций, причем на подвижной секции рычага установлен опорный ролик и она электрически связана с приводом вращения винтовой пары, а неподвижная секция рычага снабжена щупом, контактирующим с профильным кулачком.
| Устройство для автоматической сварки внутренних кольцевых швов | 1982 |
|
SU1026996A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
