(54) АВТОПРОКЛАДЧИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Автопрокладчик | 1979 |
|
SU836524A1 |
| Автосчислитель | 1979 |
|
SU836525A1 |
| АВТОМАТИЧЕСКИЙ ПРОКЛАДЧИК | 1968 |
|
SU231850A1 |
| Проекционный путепрокладчик | 1960 |
|
SU142779A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| Автопрокладчик пути судна на карте | 1989 |
|
SU1716554A1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
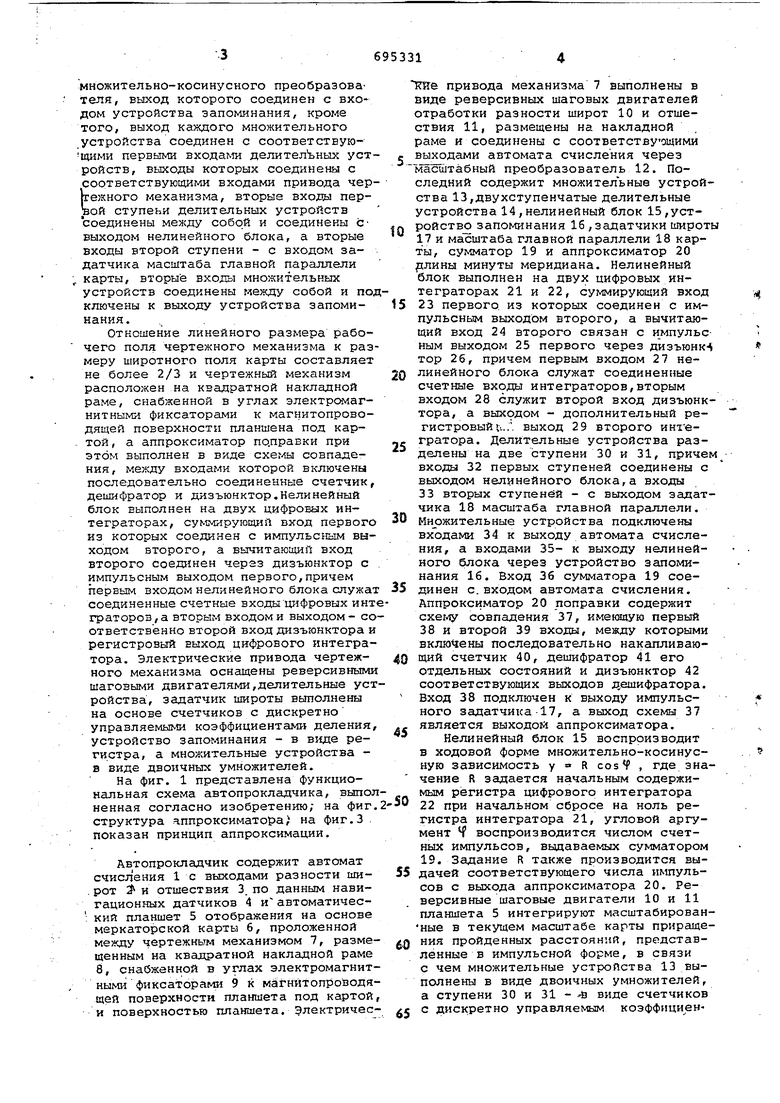
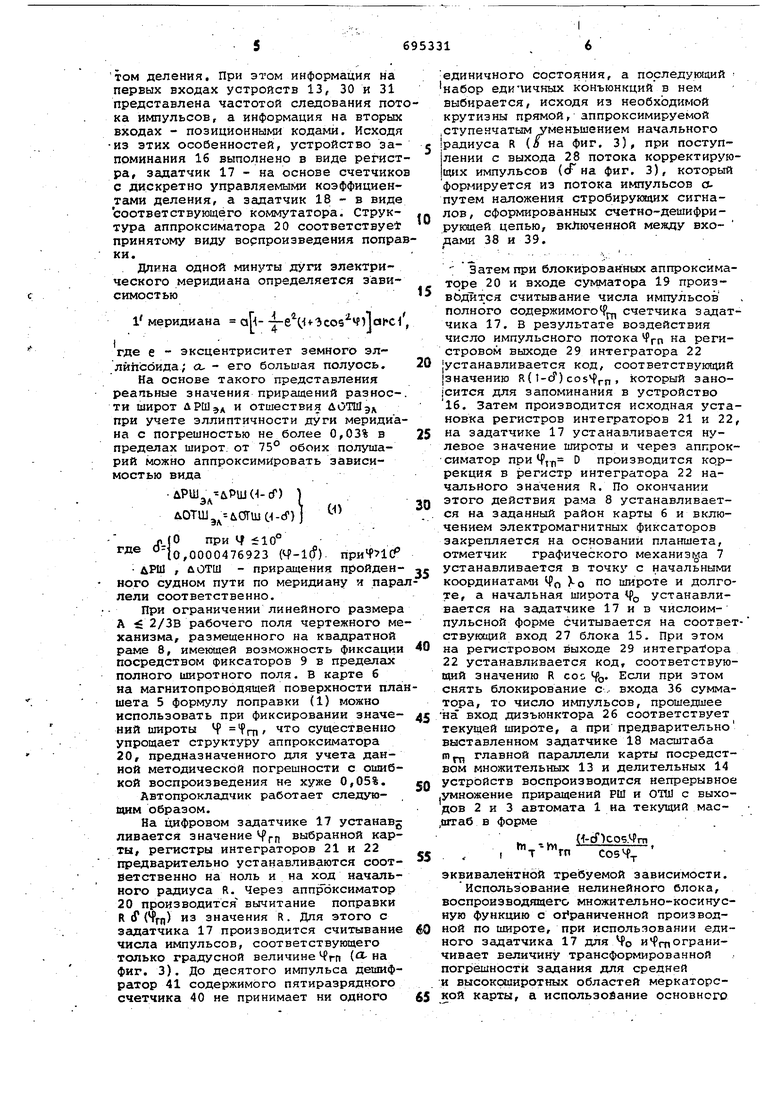
Изобретение относится к навигацион ному обеспечению детальных морских геофизических исследований, а также может найти применение в системах навигации по данным прецизионных датчиков направления и скорости движения судна. известен автопрокладчик средней точности, содержащий последовательно соединенные устройство счисления разности широт и отшествия, масштабное устройство и автоматический планшет отображения, причем масштабное устройство представляет собой блок умножения секанса текущей широты на предварительно вычисленное штурманом отношение масштаба главной параллет к секансу ее широты fl . Наиболее близким техническим решением к изобретению является автопрокладчик, содержащий блок навигационных датчиков и автомат счисления разности широт и отшествия по данным навигационных датчиков, последовательно соединенные между собой, автоматический планшет отображения на основе меркаторской .карты, проложенной между чертежным механизмом, оснащенным электрическими приводами отработки разности широт и отшествия, и поверхностью планшета, а также масштабный преобразователь, содержащий нелинейный блок, два множительных устройства, задатчик широты и масштаба главной параллели карты, причем первые входы множительных устройств соединены с соответствующими выхода1 ш автомата счисления, а первый вход нелинейного блока соединен через сум:матор с входом задатчика широты и соответствукщим выходом автомата счисления р. Недостатком известного автопрокладчика является недостаточная точность отображения места судна на путевой навигационной карте меркаторской проекции. Целью изобретения является увеличение точности отображения места судна на путевой навигационной карте меркаторской проекции. Цель достигается тем, что в автопрокладчик введены два двухступенчатых делительных устройства,аппроксиматор поправки на длину минутгл меридиана и запоминакяяее устройство, причем выход аппроксиматора соединен с входом задатчика широты, .а вход аппроксиматора - с вторум входом нелинейного блока, выполненного в виде множительно-косинусного преобразователя, выход которого соединен с входом устройства запоминания, кроме того, выход каждого множительного устройства соединен с соответствую1ДИМИ первыми входами делительньзх уст ройств, выходы которых соединены с соответствующиг-от входами привода чер ггежного механизма, вторые входы первой ступени делительных устройств соединены между собой и соединены С выходом нелинейного блока, а вторые входы второй ступени - с входом задатчика масштаба главной параллели , карты, вторые входы множительных устройств соединены между собой и по ключены к выходу устройства запоминания. Отношение линейного размера рабочего поля чертежного механизма к раз меру широтного поля карты составляет не более 2/3 к чертежный механизм расположен на квадратной накладной раме, снабженной в углах электромагнитными фиксаторами к магнитопроводящей поверхности планшена под кар. той, а аппроксиматор по.правки при этом выполнен в виде схег-щ совпадения, меяузу входами которой включены последовательно соединенные счетчик дешифратор и дизъюнктор,Нелинейный блок выполнен на двух цифровых интеграторах, cy миpyю дий вход первого из которых соединен с импульсным выходом второго, а вычитаюищй вход второго соединен через дизъюнктор с импульсным выходом первого,причем первым входом нелинейного блока служа соединенные счетные в ходыцифровых инт граторов,а вторым входом и выходом- со ответственно второй вход дизъгонктора и регистровый выход цифрового интегратора. Электрические привода чертежного механизма оснащены реверсивным шаговыми двигателями,делительные ус ройства, задатчик широты выполнены на основе счетчиков с дискретно yпpaвляeмы и коэффициентами деления устройство запоминания - в виде регистра, а множительные устройства в виде двоичных умножителей. На фиг. 1 представлена функциональная схема автопрокладчика, выпо ненная согласно изобретению; на фиг структура аппроксиматора на фиг.З показан принцип аппроксимации. Автопрокладчик содержит автомат счисления 1 с выходами разности ши. рот 3 и отшествия 3. по данным навигационных датчиков 4 и автоматичес: кий планшет 5 отображения на основе меркаторской карты 6, проложенной между чертежным механизмом 7, разме щенным на квадратной накладной раме 8, снабженной в углах электромагнит ным15 фиксаторами 9 к мигнйтопроводя щей поверхности планшета под картой и поверхностью планшета. Электричес We привода механизма 7 выполнены в виде реверсивных шаговых двигателей отработки разности широт 10 и отшествия 11, размещены на накладной раме и соединены с соответствуощими выходами автомата счисления через Ласштабный преобразователь 12. Последний содержит множительные устройства 13,двухступенчатые делительные устройства 14,нелинейный блок 15,устройство запоминания 16 , задатчики широты 17 и масштаба главной параллели 18 карты, сумматор 19 и аппроксиматор 20 рлины минуты меридиана. Нелинейный блок выполнен на двух цифровых интеграторах 21 и 22, суммирующий вход 23 первого, из которых соединен с импульсным выходом второго, а вычитающий вход 24 второго связан с импульсным выходом 25 первого через дизъюнкЧ тор 26, причем первым входом 27 нелинейного блока служат соединенные счетные входы интеграторов,вторым входом 28 служит второй вход дизъюнктора, а выходом - дополнительный регистровый ;ч... выход 29 второго интегратора. Делительные устройства разделены на две ступени 30 и 31, причем входы 32 первых ступеней соединены с выходом нелинейного блока,а входы 33 вторых ступеней - с выходом залатчика 18 масштаба главной параллели. Мн ожительные устройства подключены входами 34 к выходу автомата счисления, а входами 35- к выходу нелинейного блока через устройство запоминания 16. Вход 36 сумматора 19 соединен с. входом автомата счисления. Аппроксиматор 20 поправки содержит совпадения 37, имеющую первый 38 и второй 39 входы, между которыми включены последовательно накапливающий счетчик 40, дешифратор 41 его отдельных состояний и дизъюнктор 42 соответствующих выходов дешифратора. Вход 38 подключен к выходу импульсного задатчика 17, а выход схемы 37 является выходом аппроксиматора. Нелинейный блок 15 воспроизводит в ходовой форме множительно-косинусную зависимость у R , где значение R задается начальным содержимым регистра цифрового интегратора 22 при начальном сбросе на ноль регистра интегратора 21, угловой аргумент Ч воспроизводится числом счетных импульсов, выдаваемых сумматором 19. Задание R также производится выдачей соответствующего числа илтульсов с выхода аппроксиматора 20. Реверсивные шаговые двигатели 10 и 11 планшета 5 интегрируют масштабированные в текущем масштабе карты приращения пройденных расстояний, представленные в импульсной форме, в связи с чем множительные устройства 13 выполнены в виде двоичных умножителей, а ступени 30 и 31 - .-и виде счетчиков с дискретно управляемым коэффици ен том деления. При этом информация на первых входах устройств 13, 30 и 31 представлена частотой следования пот ка импульсов, а информация на вторых входах - позиционными кодами. Исходя из этих особенностей, устройство запоминания 16 выполнено в виде регист ра, задатчик 17 - на основе счетчико с дискретно управляемыми ноэффициенте1ми деления, а эадатчик 18 - в виде соответствующего коммутатора. Структура аппроксиматора 20 соответствует принятому виду ворпроиэведения попра ки. Длина одной минуты дуги электрического меридиана определяется зависимостью1 меридиана - еЧиЗсое ГЛо1 с1 где е - эксцентриситет земного эллипсоида; о, - его большая полуось. На основе такого представления реапьные значения приращений разности широт и отшествия ДОТШэд при учете эллиптичности дуги меридиа на с погрешностью не более 0,03% в пределах широт, от 75° обоих полушарий можно аппроксимировать зависимостью вида дРш.лРшиЛОТШз : 60ГШ«СО при ilO° (0,0000476923 (Ч-К) приЧ КР &РШ , ЛОТШ - приращения пройденного судном пути по меридиану и пара лели соответственно. При ограничении линейного размера А 2/ЗВ рабочего поля чертежного ме ханизма, размещенного на квадратной раме 8, имеющей возможность фиксации посредством фиксаторов 9 в пределах полного широтного поля, В карте б на магнитопроводящей поверхности пла шета 5 формулу поправки (1) можно использовать при фиксировании значеНИИ широты Ч Чт/ существенно упрощает структуру аппроксиматора 20, предназначенного для учета данной методической погрешности с ошибкой воспроизведения не хуже 0,05%. Автопрокладчик работает следующим образом. На цифровом задатчике 17 устанав ливается значение 4гп выбранной карты, регистры интеграторов 21 и 22 предварительно устанавливаются соответственно на ноль и на ход начального радиуса R, Через аппроксиматор 20 производится вычитание поправки R (Г (Чгп) из значения R. Для этого с задатчика 17 производится считывание числа импульсов, соответствующего только градусной величине fгr ( на фиг. 3), До десятого импульса дешифратор 41 содержимого пятиразрядного счетчика 40 не принимает ни одного единичного состояния, а последующий набор едишчных конъюнкций в нем выбирается, исходя из необходимой крутизны прямой, аппроксимируемой .ступенчатым уменьшением начального радиуса R (на фиг, 3), при поступлении с выхода 28 потока корректирующих импульсов (сГ на фиг, 3), который формируется из потока импульсов опутем наложения стробируквдих сигналов, сформированных счетно-дешифрируквдей цепью/ включенной между входами 38 и 39. ; атемпри блокированных аппроксиматоре 20 и входе сумматора 19 произвбдйтся считывание числа импульсов полного содержимогоЧ счетчика задатчика 17, В результате воздействия число импульсного потока }rn на регистровом выходе 29 интегратора 22 |устанавливается код, соответствующий |значению R( t-c) cosSrn который зано|сится для запоминания в устройство 16, Затем производится исходная установка регистров интеграторов 21 и 22, на задатчике 17 устанавливается нулевое значение широты и через аппроксиматор при 4,. D производится коррекция в регистр интегратора 22 начального значения R, По окончании этого действия рама 8 устанавливается на заданный район карты 6 и включением электромагнитных фиксаторов закрепляется на оснований планшета, отметчик графического мехами31 а 7 устанавливается в точку с начальными координатами о по широте и долготе, а начальная широта tpo устанавливается на задатчике 17 и в числоимпульсной форме считывается на соответствующий вход 27 блока 15. При этом на регистровом выходе 29 интегратора 22 устанавливается код, соответствующий значению R сое %, Если при этом снять блокирование с-.- входа 36 сумматора, то число импульсов, прошедшее на вход дизъюнктора 26 соответствует текущей широте, а при предварительно выставленном задатчике 18 масштаба tn главной параллели карты посредством множительных 13 и делительных 14 устройств воспроизводится непрерывное умножение приращений РШ и отаз с выходов 2 и 3 автомата 1 на текущий масштаб в форме к, -W, (t-cf)cog.4m , , cosM эквивалентной требуемой зависимости. Использование нелинейного блока, воспроизводящего множительно-косинусную функцию с ограниченной производной по широте, при использовании единого задатчика 17 для ЛРо иН гп° Рэничивает величину трансформированной погр ёшностй задания для средней и высоксядиротных областей меркаторской карты, а использование основного
