Изобретение относится к области технических средств судовождения, а именно к двухрежимным корректируемым гирокурсоуказателям (ГКУ) и гироазимуткомпасам (ГАК), предназначенным для определения курса относительно географического меридиана - в режиме гирокомпаса (ГК) или угла отклонения от заданного направления - в режиме гироазимута (ГА). Поскольку гирокомпасы (режим ГК) по своим техническим возможностям могут работать, как правило, только до широт 80-87°, то в более высоких широтах используется режим ГА, в том числе при ведении счисления в квазигеографической системе координат.
Как известно, названные гироскопические курсоуказатели и гироазимуткомпасы в режиме гирокомпаса имеют широтную и скоростную девиацию. Для осуществления широтной коррекции к гироскопическому чувствительному элементу (ЧЭ) гироазимуткомпаса и гирокурсоуказателя прикладывается горизонтальный корректирующий момент (коррекция в азимуте), а для скоростной коррекции - вертикальный корректирующий момент (коррекция по высоте) [Е.Л.Смирнов, А.В.Яловенко, А.А.Якушенков. Технические средства судовождения. Теория. - М.: Транспорт, 1988. - 376 с.].
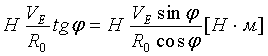
При использовании названных гироскопических приборов в режиме ГА, а такое использование имеет актуальное значение в высоких и приполюсных районах, осуществляется только широтная коррекция:

где Н - кинетический момент гироскопа [Н·м·с];
ω0 [рад/с] - угловая скорость вращения Земли в инерциальном пространстве;
φ [градусы, минуты] - широта плавания;
VE [м/с] - линейная скорость движения судна по параллели;
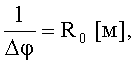
R0 [м] - радиус Земли [м];
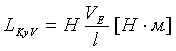
Lky [Н·м] - горизонтальный (азимутальный) корректирующий момент;
Hω0sinφ[Н·м] - первая составляющая корректирующего момента, вызванная вертикальной составляющей угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат). В данной составляющей величина:
ω0sinφ=ω2 [рад/с] - вертикальная составляющая угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат);
 - вторая составляющая корректирующего момента, вызванная вертикальной составляющей угловой скорости вращения судна при его движении по параллели (угловой скорости вращения меридиана вследствие движения судна по параллели). В данной составляющей величина:
- вторая составляющая корректирующего момента, вызванная вертикальной составляющей угловой скорости вращения судна при его движении по параллели (угловой скорости вращения меридиана вследствие движения судна по параллели). В данной составляющей величина:
R0cosφ=r [м] - радиус параллели места судна;
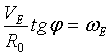 [рад/с] - вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели);
[рад/с] - вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели);
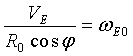 [рад/с] - полный вектор угловой скорости вращения судна вокруг оси Земли (в инерциальном пространстве) вследствие его движения по параллели.
[рад/с] - полный вектор угловой скорости вращения судна вокруг оси Земли (в инерциальном пространстве) вследствие его движения по параллели.
Удержание чувствительного элемента в плоскости горизонта осуществляется вертикальным моментом, который формируется по данным физического маятника - индикатора горизонта (ИГ) или акселерометра, которые измеряют отклонение ЧЭ по высоте.
В настоящее время надводные суда достигают районов северного полюса, следовательно, реальным становится вопрос промышленного освоения Арктики. Таким образом, задачи обеспечения плавания судов в арктических широтах приобретают особую актуальность. В частности, актуальной становится техническая задача повышения точности и степени автоматизации курсоуказания в высоких и приполюсных широтах. В этих широтах, как известно, не работают ни магнитные компасы, ни гирокомпасы, поэтому и по курсу судно управляется только от гироазимута.
Для ведения графического счисления в диапазоне широт 80-85° используются морские карты как в географической, так и в квазигеографической системах координат. В указанном диапазоне широт переходят к ведению счисления из географической системы координат в квазигеографическую, поскольку в широтах выше 85° морские карты существуют только в поперечной меркаторской проекции (в квазигеографической системе координат). Для перехода от географического курса ГК [градусы] судна к квазикурсу Kg [градусы] используется формула
Kg=ГК+Q [градусы],
где Q - угол перехода, то есть угол между квазимеридианом и географическим меридианом, и равный, без учета сжатия Земли, географической долготе χ места судна в градусах:
Q=λ [градусы].
С этого момента выработка вышеназванной второй составляющей корректирующего момента прекращается, так как теперь квазиполюс находится на квазиэкваторе в новой системе координат, следовательно, вращение квазимеридиана от движения судна по квазипараллели не происходит. Таким образом, в квазигеографической системе координат вырабатывается только вышеназванная первая составляющая корректирующего момента:
Hω0sinφ=Lky1 [H·м].
Известен гироазимуткомпас «Вега» [В.В.Воронов, В.К.Перфильев, А.В.Яловенко. Технические средства судовождения. Конструкция и эксплуатация. - М.: «Элмор», 1988. - 336 с.], предназначенный для судов арктического плавания. ГАК «Вега» для судов арктического плавания имеет основной прибор, содержащий гироскопический чувствительный элемент с косвенным управлением по данным индикатора горизонта, обеспечивающим связь ЧЭ с Землей. Управляющие и корректирующие моменты прикладываются к ЧЭ датчиками моментов через вертикальные и горизонтальные торсионы. В состав комплекта ГАК «Вега» входит также прибор-корректор, вырабатывающий, в частности, сигналы, по которым формируются вышеназванные корректирующие моменты. Прибор-корректор имеет также электромеханическую схему в виде расшифровывающей следящей системы, позволяющей рассчитывать вторую составляющую горизонтального корректирующего момента Lky до широты 88°, однако эту схему в целях достоверности данных рекомендуется отключать и переходить в режим ГА уже в широте 85°. В этом случае, как указано выше, она не нужна, так как одновременно систему курсоуказания переводят введением угла перехода Q=λ в квазигеографическую систему координат и, гироазимут в этом случае вырабатывает квазикурс.
Недостатком известного прибора является отсутствие в высоких широтах географического курса на судне, а следовательно, невозможность определения географических направлений. Определение таких направлений необходимо при выполнении судном некоторых специальных задач.
Угол перехода Q может быть получен только расчетным путем и только вручную по счислимой географической долготе. Таким образом, отсутствие автоматической выработки текущего угла перехода QT в условиях влияния субъективного фактора является вторым недостатком известного прибора.
Третьим недостатком известного прибора является низкая точность выработки корректирующего момента с помощью упомянутой специально созданной для высоких широт электромеханической расшифровывающей следящей системы. Ее входной сигнал незначительный и пропорционален величине угловой скорости VE/R0, входящей во вторую составляющую корректирующего момента. В дальнейшем он сравнивается с также незначительным сигналом, пропорциональным cosφ. Так реализуется функция tgφ. Поскольку значение функции tφ при приближении к широте 90° резко увеличивается, то даже малая ошибка входного сигнала, умноженная на большую величину tgφ, на выходе схемы дает значительную погрешность в точности выработки данных. Кроме того, указанная схема вообще не позволяет реализовать функцию tgφ в широтах, близких к 90°, так как ее значение стремится к бесконечности. Точность работы схемы в широтах выше 88° резко снижается из-за изменения линейности сигнала tgφ. Названные обстоятельства являются основными причинами, вследствие которых в ГАК «Вега» для судов арктического плавания расчет второй составляющей корректирующего момента ограничен широтой 88°.
Четвертый недостаток известного прибора связан с необходимостью периодической ручной коррекции ЧЭ гироазимуткомпаса при плавании в квазигеографической системе координат. Дело в том, что в принципе для обеспечения курсоуказания в квазигеографической системе координат угол перехода Q, введенный в схему гироазимута в точке входа в квазигеографическую систему координат, менять не нужно, так как ЧЭ удерживается в квазимеридиане первой составляющей корректирующего момента. В этом случае в текущем месте судна гироскопический ЧЭ отклонен от географического меридиана на величину угла ΔQ, равного разности угла перехода QТ в текущем месте судна и угла перехода Q в точке входа в квазигеографическую систему координат: ΔQ=QT-Q.
Кроме того, гироазимут всегда имеет собственный неучтенный дрейф в азимуте  градус/час. Отклонение ЧЭ в азимуте (то есть поправка квазикурса ΔKg) за счет указанного дрейфа в азимуте может быть получено прямым измерением с помощью астрономических средств, что не всегда возможно по метеоусловиям. Для нахождения полного (суммарного) угла ΔK отклонения ЧЭ от географического меридиана производят алгебраическое суммирование значения ΔKg со значением угла ΔQ:
градус/час. Отклонение ЧЭ в азимуте (то есть поправка квазикурса ΔKg) за счет указанного дрейфа в азимуте может быть получено прямым измерением с помощью астрономических средств, что не всегда возможно по метеоусловиям. Для нахождения полного (суммарного) угла ΔK отклонения ЧЭ от географического меридиана производят алгебраическое суммирование значения ΔKg со значением угла ΔQ:
ΔK=ΔQ+ΔKg [градусы].
При каждом измерении поправки квазикурса ΔKg определяют дрейф ЧЭ в азимуте  по формуле
по формуле
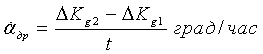
где ΔKg2 [градусы] - поправка, полученная в текущее время;
ΔKg1 [градусы] - ранее измеренная поправка;
t [часы] - промежуток времени между определениями поправок.
В случае невозможности выполнения астрономических наблюдений по погодным условиям отклонение ЧЭ рассчитывают по ранее определенному дрейфу с использованием формулы:
 ,
,
где tn [часы] - время плавания между предыдущим моментом ввода коррекции до текущего момента времени.
Однако с течением времени дрейф ЧЭ гироазимута  может изменяться. С целью его контроля при указанной невозможности астрономических наблюдений рекомендуется заклинивать судно во льдах и проверять дрейф по скорости изменения показаний курсовых шкал в течение не менее 30 минут [Б.М.Коган, М.В.Чичинадзе. Судовой гироазимуткомпас «Вега». - М.: «Транспорт», 1983. - 200 с.]. Очевидно, что любой вход в ледяное поле опасен для судна, однако в этом случае он необходим для целей курсоуказания.
может изменяться. С целью его контроля при указанной невозможности астрономических наблюдений рекомендуется заклинивать судно во льдах и проверять дрейф по скорости изменения показаний курсовых шкал в течение не менее 30 минут [Б.М.Коган, М.В.Чичинадзе. Судовой гироазимуткомпас «Вега». - М.: «Транспорт», 1983. - 200 с.]. Очевидно, что любой вход в ледяное поле опасен для судна, однако в этом случае он необходим для целей курсоуказания.
Принципиально названное суммарное отклонение ΔK чувствительного элемента от географического меридиана может достигать значения от 0 до 180°. Но при использовании известного прибора допустимая величина отклонения не должна превышать значения 30°, так как в противном случае значительно возрастает вертикальный дрейф ЧЭ, с которым схема ранее названного вертикального момента, формируемого от индикатора горизонта, не справляется, и ЧЭ отклоняется от плоскости горизонта на значительный угол [Б.М.Коган, М.В.Чичинадзе. Судовой гироазимуткомпас «Вега». - М.: «Транспорт», 1983. - 200 с.]. Данное обстоятельство, в свою очередь, приводит к резкому снижению точности работы гироазимута. Следовательно, ЧЭ необходимо периодически корректировать, приводя его в географический меридиан вручную. После чего вводят новый угол перехода Q для точки коррекции. Частота ввода коррекции зависит от курса и скорости судна и расстояния до полюса - чем ближе к полюсу, и(или) чем выше скорость, тем выше частота. Например, в широте 89° при движении судна по параллели скоростью 10 узлов производить коррекцию необходимо через 3 часа, а в широте 89,5° при тех же условиях движения корректировать ЧЭ необходимо уже через 1,5 часа. Причем в течение времени ввода коррекции прибор не может выполнять свои функции, что немаловажно. Такие же действия необходимо выполнить и по возвращению из приполюсных районов при обратном переходе в географическую систему координат, что также требует дополнительного времени и необходимой точности. Такие недостатки имеет известный гироазимуткомпас «Вега» для судов арктического плавания.
Известен гирокурсоуказатель «ГКУ-1» [Е.Л.Смирнов, А.В.Яловенко, В.К.Перфильев, В.В.Воронов, В.В.Сизов. Технические средства судовождения. Т.2. Конструкция и эксплуатация. - СПб.: «Элмор», 2000. - 656 с.], имеющий основной прибор, содержащий гироскопический чувствительный элемент, управляемый по данным индикатора горизонта путем наложения управляющих моментов, а также прибор-корректор, в котором сигнал, пропорциональный корректирующему моменту Lky, создается по данным широты φ от автопрокладчика и скорости V от лага. При переходе в квазигеографическую систему координат прибор может использоваться в режиме гирокомпаса (ГК) до широты 87°. Таким образом, вторая составляющая корректирующего момента вырабатывается до широты φ=87°. В более высоких широтах известный «ГКУ-1» переводят в режим ГА, и выработка второй составляющей корректирующего момента прекращается. Проблема нахождения географического курса ГК решается обратным путем - вычислением из известного уравнения относительно географического курса:
ГК=Kg-Q [градусы].
Этот вариант реализуется или вручную, или автоматически с помощью автопрокладчика, или с помощью электронной картографической системы, снабженной специальной программой. Для непрерывного получения географического курса необходимо постоянно из квазикурса вычитать значение географической долготы.
Недостатком известного прибора является то обстоятельство, что коррекция ЧЭ как в географической, так и квазигеографической системах координат, а также угол перехода вырабатываются неавтономно, что не позволяет использовать прибор отдельно, не в составе навигационного комплекса.
Второй недостаток известного прибора состоит в том, что в квазигеографических координатах географический курс только вычисляется, но не вырабатывается, а гироскопический чувствительный элемент в режиме ГА находится в квазигеографическом меридиане. Таким образом, остается необходимость в вышеназванной периодической ручной коррекции ЧЭ. Такие недостатки имеет гирокурсоуказатель «ГКУ-1».
Известен гирокомпас с внешней коррекцией [Патент РФ №2063611], включающий все элементы основного прибора и прибора коррекции известных гирокомпасов с косвенным управлением (типа "Вега", ГКУ-1 и др.), а также блок дополнительной коррекции, сопряженный с комплексом судовых навигационных средств и прибором коррекции и работающий таким образом, что по данным внешней информации и сигналу управления прецессией чувствительного элемента формируется сигнал дополнительной коррекции, обеспечивающий приведение оси ЧЭ к плоскости меридиана и горизонта.
Недостаток известного прибора состоит в том, что блок дополнительной коррекции не является автономным и работает по данным внешних источников информации. В случае потери связи с указанными источниками или выходе из строя одного из них блок дополнительной коррекции работать не сможет.
Второй недостаток известного прибора заключается в невозможности использования блока дополнительной коррекции в режиме ГА. Таким образом, в приполюсных широтах необходима ручная коррекция ЧЭ, которая, как указано выше, выполняется эпизодически, а проблема автоматической коррекции ЧЭ и автоматической выработки угла перехода остается нерешенной.
Известен принятый за прототип гироазимуткомпас с автоматической выработкой навигационной информации [заявка №2010103270/28(004528) на патент РФ], с автоматической коррекцией широты места судна, содержащий функционально самостоятельные элементы и их связи: пульт оператора, имеющий узлы ручного ввода данных широты места и скорости судна, блок электронный, блок внешнего источника информации, имеющий в составе лаг и приемоиндикатор спутниковой навигационной системы, а также центральный прибор с гироскопическим чувствительным элементом, трансляционное устройство курса с репитерами курса и устройство автономной автоматической коррекции широты места судна, образованное последовательно соединенными усилителем, интегрирующим устройством и суммирующим устройством. При этом первый выход блока электронного соединен с первым входом центрального прибора, второй выход блока электронного имеет электрическую связь со вторым входом центрального прибора, а выход центрального прибора имеет электрическую связь с трансляционным устройством курса судна. Узел ручного ввода широты места судна пульта оператора подключен к первому входу устройства автоматической коррекции широты места судна, а выход устройства автоматической коррекции широты места судна, в свою очередь, подключен к первому входу блока электронного. Узел ручного ввода скорости судна пульта оператора подключен к второму входу блока электронного, лаг и приемоиндикатор спутниковой навигационной системы блока внешнего источника информации подключены к блоку электронному соответственно через его третий и четвертый с пятым входы. Причем первый выход блока электронного дополнительно соединен со вторым входом устройства автоматической коррекции широты места судна.
Известный прибор имеет достаточно высокую степень автоматизации: в частности процедура запуска и остановки осуществляется автоматически; применен автоматический переход из режима «Гирокомпас» в режим «Гироазимут» при маневрировании судна; реализовано автоматическое введение информации о скорости и широте места судна от спутниковой навигационной системы, а также автоматическая сигнализация об исчезновении этой информации [Е.Л.Смирнов, А.В.Яловенко, В.К.Перфильев, В.В.Воронов, В.В.Сизов. Технические средства судовождения. Т.2. Конструкция и эксплуатация. - СПб.: «Элмор», 2000. - 656 с.]; в случаях, когда автоматическая коррекция широты невозможна от приемоиндикатора спутниковой навигационной системы, используют устройство автоматической коррекции широты места судна [заявка №2010103270/28(004528) на патент РФ]. Известный гироазимуткомпас используют в режиме «Гирокомпас» только до широт 75°, а в режиме «Гироазимут» - до 80°. Автоматический запуск известного гироазимуткомпаса обеспечивает достаточно быстрый его приход в меридиан. По этой причине он не имеет устройства ускоренного приведения в меридиан, то есть устройства ручного управления чувствительным элементом в азимуте. Указанное обстоятельство ограничивает возможности использования прибора в режиме «Гироазимута». Например, плавание в широтах от 75 до 80°, что возможно по техническим условиям, не может быть длительным. Несмотря на то что дрейф ЧЭ названного гироазимуткомпаса составляет всего 0,1-0,2 градус/час, за сутки поправка гироазимута может достичь около 5°. При этом ввести коррекцию в прибор невозможно. Это является недостатком гироазимуткомпаса. Вторым недостатком известного прибора остается невозможность его использования в квазигеографической системе координат как из-за отсутствия ручной или автоматической коррекции гироазимута, так и невозможности ввода угла перехода к квазикурсу в приполюсных широтах для ведения счисления в квазигеографической системе координат.
Технической задачей, на которую направлено заявляемое изобретение, является устранение указанных недостатков, а именно при постоянной выработке с высокой точностью географического курса в любых широтах с помощью гирокомпаса или гироазимута обеспечить в высоких широтах, вплоть до полюса Земли, дополнительно в режиме гироазимута его автоматическую коррекцию в географическом меридиане, а также автоматическую выработку квазикурса и тем самым обеспечить счисление в квазигеографической системе координат и соответственно с одновременной непрерывной автоматической выработкой счислимых географических координат места судна.
Указанная техническая задача достигается тем, что в известном гироазимуткомпасе с автоматической выработкой навигационной информации, содержащем пульт оператора, имеющий узлы ручного ввода данных широты места и скорости судна; центральный прибор с гироскопическим чувствительным элементом; блок электронный, формирующий сигналы коррекции гироскопического ЧЭ; блок внешнего источника информации, включающий лаг и приемоиндикатор спутниковой навигационной системы; трансляционное устройство курса (транслятор курса) с репитерами курса, а также устройство автоматической коррекции широты места судна, при этом первый выход блока электронного соединен с первым входом центрального прибора, второй выход блока электронного имеет электрическую связь со вторым входом центрального прибора, а выход центрального прибора имеет электрическую связь с трансляционным устройством курса судна; кроме того, узел ручного ввода широты места судна пульта оператора подключен к первому входу устройства автоматической коррекции широты места судна, а выход устройства автоматической коррекции широты места судна подключен к первому входу блока электронного; узел ручного ввода скорости судна пульта оператора подключен к второму входу блока электронного, лаг и приемоиндикатор спутниковой навигационной системы блока внешнего источника информации подключены к блоку электронному соответственно через его третий и четвертый с пятым входы, первый выход блока электронного дополнительно соединен со вторым входом устройства автоматической коррекции широты места судна, в отличие от него заявляемое дополнительно содержит обычное вычислительное устройство всеширотной коррекции гироазимуткомпаса; интегрирующее устройство; первое, второе и третье суммирующее устройство; первый и второй усилитель; первый и второй переключатель; узел ручного ввода начальных данных долготы места судна, индикатор текущей долготы места судна и устройство ручной коррекции гироазимуткомпаса. При этом первый вход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен с выходом узла ручного ввода скорости пульта оператора, его второй вход соединен с выходом лага блока внешнего источника информации, его третий вход соединен с выходом устройства автоматической коррекции широты места судна, а его четвертый вход соединен с выходом центрального прибора. Первый выход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен с входом первого усилителя, выход которого соединен со входом интегрирующего устройства. Выход интегрирующего устройства соединен с первым входом первого суммирующего устройства, второй вход которого соединен с выходом узла ручного ввода данных начальной долготы места судна, а выход первого суммирующего устройства соединен со входом индикатора текущей долготы места судна и с первым входом второго суммирующего устройства. Дополнительно к выходу центрального прибора подключен первый вход первого переключателя, имеющего три положения. Первый выход первого переключателя соединен со входом трансляционного устройства курса судна; второй выход первого переключателя соединен со вторым входом второго суммирующего устройства. Третий выход первого переключателя соединен со входами судовых потребителей географического курса при плавании судна в квазигеографической системе координат. Выход второго суммирующего устройства соединен со вторым входом первого переключателя. Второй выход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен с первым входом третьего суммирующего устройства, а третий выход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен со вторым входом третьего суммирующего устройства, выход которого соединен с входом второго усилителя. В свою очередь, выход второго усилителя соединен с первым входом второго переключателя. Второй вход второго переключателя соединен со вторым выходом блока электронного, а выход указанного второго переключателя соединен со вторым входом центрального прибора. Дополнительно к второму входу центрального прибора подключено своим выходом устройство ручной коррекции гироазимута.
Совокупность отличительных и ограничительных признаков заявляемого изобретения, выражающаяся в дополнительной установке известных вычислительного устройства всеширотной коррекции гироазимуткомпаса, первого и второго усилителей; первого, второго и третьего суммирующего устройства; первого и второго переключателей, узла ручного ввода начальных данных долготы места судна, индикатора текущей долготы места судна, интегрирующего устройства, в совокупности с их связями обеспечивает достижение поставленной технической задачи следующим путем.
При штатном запуске гироазимуткомпаса в пульт оператора вводят через соответствующие узлы ручного ввода данные о начальной долготе λН места и скорости судна. С выхода узла ручного ввода скорости снимается напряжение UV и подается одновременно на второй вход блока электронного и первый вход вычислительного устройства всеширотной коррекции гироазимуткомпаса. Напряжение UV, пропорциональное скорости судна, может подаваться и автоматически с блока внешнего источника информации от лага на третий вход блока электронного и второй вход вычислительного устройства всеширотной коррекции гироазимуткомпаса. Данные о начальной широте φН места судна вводят также с пульта оператора через узел ручного ввода широты, с выхода которого снимается напряжение UφН, которое подается на первый вход известного устройства автоматической коррекции широты [см. заявку №2010103270/28(004528)]. На второй вход названного устройства автоматической коррекции широты с первого выхода блока электронного подается напряжение, пропорциональное вертикальному корректирующему моменту скоростной девиации, который, в свою очередь, пропорционален приращению широты. Устройство автоматической коррекции широты формирует сигнал UφT, пропорциональный текущей широте места судна, и подает со своего выхода на первый вход блока электронного и на третий вход вычислительного устройства всеширотной коррекции гироазимуткомпаса. Кроме того, на четвертый вход вычислительного устройства всеширотной коррекции гироазимуткомпаса с выхода центрального прибора подается напряжение UГК, пропорциональное курсу судна.
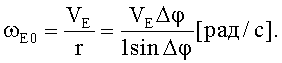
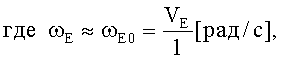
Вычислительное устройство всеширотной коррекции гироазимуткомпаса формирует угловые скорости, входящие в состав широтной коррекции:
- угловую скорость вращения меридиана вследствие вращения Земли [рад/с]:
ω2=ω0sinφ [рад/с],
где ω2 [рад/с] - вертикальная составляющая угловой скорости вращения Земли (угловая скорость вращения меридиана в горизонтной системе координат);
ω0 [рад/с] - угловая скорость вращения Земли;
φ [градусы, минуты] - широта плавания;
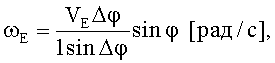
- и вертикальную составляющую угловой скорости вращения меридиана вследствие движения судна по параллели
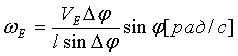
где ωE [рад/с] - вертикальная составляющая угловой скорости вращения меридиана вокруг вертикали вследствие движения судна по параллели;
VE [м/с] - линейная скорость движения судна по параллели;
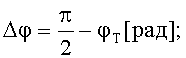
Δφ [рад] - угловое расстояние от текущей широты φТ места судна до полюса:
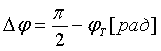 ;
;
l - [м] расстояние по меридиану от текущей широты φT до полюса;
π=3,14 [рад]=180°.
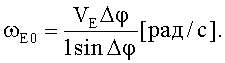
При этом сама составляющая ωE формируется в два этапа. На первом этапе формируется угловая скорость ωE0 вращения судна относительно оси Земли:
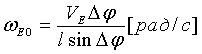 ,
,
которая является скоростью изменения долготы при движении судна по параллели.
Напряжение UωE0, пропорциональное угловой скорости вращения меридиана относительно оси Земли вследствие движения судна по параллели, с первого выхода вычислительного устройства всеширотной коррекции гироазимуткомпаса поступает на вход первого усилителя, где происходит преобразование сигнала в градусную меру:
MωE0=57,3 ωE0 [градус/с]
где М=57,3° - количество градусов в одном радиане.
Напряжение U1ωE0 в новом масштабе с него поступает на вход интегрирующего устройства. Следовательно, интегрирующее устройство без учета сжатия Земли рассчитывает приращение долготы:
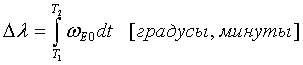
где Т1 и T2 [с] - пределы интегрирования, определяемые временем начала и окончания плавания судна по параллели.
Изложенное в представляемом происходящем процессе выражение формально отличается по записи от известной принятой без учета сжатия Земли в автосчислителях и автопрокладчиках [Паластров В.Ф. и др. Навигация. - М.: Воен. издат. МО, 1967. - 792 с.], которая имеет вид:
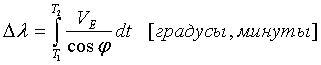
Размерность разности долгот в ней зависит от выбранных единиц скорости. Как правило, - это узлы, то есть мили в час. Поскольку одна минута по экватору равна 1 миле, то полученная величина равна количеству угловых минут, пройденных по экватору в заданное время. Деление в ней на cosφ дает разность долгот в зависимости от широты места судна. Однако скорость, как известно, может быть измерена также в градусах и дуговых минутах в час, тогда Δλ будет в градусах и минутах долготы.
В представляемой формуле входящее в нее соотношение VE/l не зависит от выбранных единиц измерения. Если скорость VE измерена в градусах и дуговых минутах в час, а расстояние до полюса l, как дуга меридиана выражена в градусах, то при вводе коэффициента масштаба М=57,3° Δφ получается в градусах. При этом угол и дуга, на которую этот угол опирается, равны друг другу и имеют одну размерность, следовательно, справедливо равенство Δφ/l=1, поскольку данные величины сокращаются. Известно также, исходя из значения входящего в формулу значения Δφ, что:
Представленные преобразования показывают и подтверждают достоверность изложенного, а именно, что:

Очевидно, что представляемая формула полностью обращается в принятую в судовождении формулу, но является предпочтительной в заявляемом изобретении, так как используется в нем для выработки момента коррекции посредством интегрирующего устройства, в то время как принятая в судовождении формула для работы гироазимуткомпаса не нужна.
С выхода интегрирующего устройства напряжение UΔλ, пропорциональное приращению долготы, подается на первый вход первого суммирующего устройства (первого сумматора). На второй вход указанного первого сумматора подается напряжение UλH, пропорциональное начальной долготе места судна, с выхода узла ручного ввода долготы. Данный узел в частном случае может монтироваться в пульт оператора. Таким образом, первый сумматор вычисляет текущую долготу места судна:
λT=(λH+Δλ) [градусы, мин].
С выхода названного первого сумматора напряжение UλT, пропорциональное текущей географической долготе места судна, поступает на индикатор текущей долготы λT и на первый вход второго суммирующего устройства. Так работает устройство выработки текущей долготы во всех широтах. Таким образом, заявляемый гироазимуткомпас приобрел дополнительные функции автосчислителя.
Дополнительно к выходу центрального прибора подключен первый вход первого переключателя, который имеет три положения. Географический курс в этом случае снимается в виде напряжения UГК с выхода центрального прибора и поступает на первый вход первого переключателя, который устанавливают в первое положение, в котором он коммутирует передачу курса с его первого выхода на вход трансляционного устройства и репитеры курса.
При переходе в квазигеографическую систему координат первый переключатель устанавливают во второе положение, тем самым коммутируют подачу напряжения UГК, пропорционального географическому курсу, со второго выхода названного переключателя на второй вход второго сумматора. Второй сумматор суммирует электрические сигналы:
Kg=ГК+λT=ГК+QT [градусы],
где QT [градусы] - текущий угол перехода к квазигеографическому курсу (квазикурсу).
Т.е. он вырабатывает квазикурс, учитывая, что угол перехода равен долготе места судна. С выхода второго сумматора напряжение UKg, пропорциональное квазигеографическому курсу, поступает на второй вход первого переключателя, а с его первого выхода поступает на трансляционное устройство и репитеры курса. Теперь названные репитеры отображают квазикурс Kg.
Третье положение первого переключателя используется также в квазигеографической системе координат: напряжения UГК, пропорциональное географическому курсу, с его третьего выхода поступает для обеспечения судовых потребителей географического курса, а со второго выхода названного переключателя поступает на второй вход второго сумматора, где, складываясь с напряжением UλТ, преобразуется в напряжение UKg, пропорциональное квазигеографическому курсу, которое поступает на второй вход первого переключателя, а с его первого выхода - на трансляционное устройство и репитеры курса.
Таким образом, имея три положения, первый переключатель решает следующие задачи. В первом положении он передает географический курс от центрального прибора на трансляционное устройство и репитеры. Во втором положении он передает географический курс от центрального прибора на второй сумматор, где формируется квазикурс, а затем передает квазикурс на трансляционное устройство и репитеры. В третьем положении первый переключатель выполняет последнюю из указанных функций, то есть передает квазикурс на трансляционное устройство и репитеры, и дополнительно через свой третий выход подключает судовые потребители географического курса, которые необходимы при плавании в квазигеографической системе координат. Потребителями географического курса, в зависимости от решаемых судном конкретных задач, могут быть пеленгаторные репитеры, некоторые системы судовой автоматики, радиолокаторы, системы ориентации неуправляемых летательных аппаратов, полет которых осуществляется за пределы квазигеографической системы координат.
Широтная коррекция гироскопического ЧЭ центрального прибора осуществляется следующим образом. Напряжение UωЕ, пропорциональное вертикальной составляющей угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат) вследствие движения судна по параллели, подается со второго выхода вычислительного устройства всеширотной коррекции гироазимуткомпаса на первый вход третьего суммирующего устройства (третьего сумматора). С третьего выхода вычислительного устройства всеширотной коррекции гироазимуткомпаса на второй вход третьего сумматора подается напряжение Uω2, пропорциональное вертикальной составляющей угловой скорости вращения меридиана вследствие вращения Земли. В третьем сумматоре происходит суммирование данных электрических сигналов:
ωΣ=(ω2+ωE) [рад/с]
где ωΣ [рад/с] - суммарная вертикальная составляющая угловой скорости вследствие вращения Земли и движения судна по параллели;
ω2=ω0sinφ [рад/с] - вертикальная составляющая угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат);
 [рад/с] - вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели).
[рад/с] - вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели).
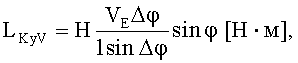
Напряжение UωΣ, пропорциональное сумме названных угловых скоростей, с выхода третьего сумматора подается на вход второго усилителя, где производится его умножение на величину кинетического момента гироскопа H [Н м/с]. Таким образом формируется напряжение ULky, пропорциональное моменту широтной коррекции:

где Lky [Н·м] - горизонтальный корректирующий момент;
Н - кинетический момент гироскопа [Н·м·с];
ω0 [рад/с] - угловая скорость вращения Земли в инерциальном пространстве;
φ [градусы, минуты] - широта плавания;
VE [м/с] - линейная скорость движения судна по параллели;
R0 [м] - радиус Земли [м].
Указанное напряжение ULky, пропорциональное азимутальному моменту широтной коррекции, с выхода второго усилителя подается на первый вход второго переключателя, находящегося в первом положении, с выхода которого названное напряжение через второй вход центрального прибора поступает на датчик горизонтальных моментов (не показан) для широтной коррекции ЧЭ. Как отмечалось ранее, названный второй переключатель имеет два положения. Во втором положении второго переключателя напряжение ULky, пропорциональное азимутальному моменту широтной коррекции, поступает со второго выхода блока электронного на второй вход второго переключателя, а с его выхода - на второй вход центрального прибора для коррекции ЧЭ.
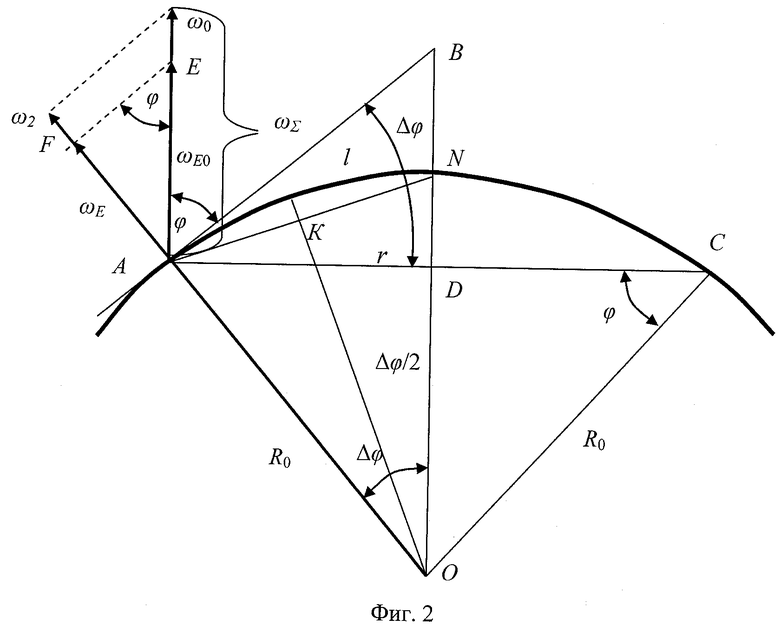
В заявляемом изобретении отличие в аппаратном расчете второй составляющей корректирующего момента заключается в разнице аппаратного расчета радиуса параллели r [м]. При обычном расчете радиус параллели r [м] равен:
r=R0 cosφ [м].
Если судно находится в точке А на параллели текущей широты φT, то, соответственно, угол AON при центре Земли, опирающийся на дугу меридиана l [м] от текущей параллели φT до полюса, равен:
 .
.
Тогда длина названной части меридиана будет представлена согласно следующему выражению [см. Математический энциклопедический словарь. - М.: «Советская энциклопедия», 1988. - 848 с.]:
l=R0Δφ [м],
где l [м] - длина дуги меридиана от текущей параллели φT до полюса;
R0 [м] - радиус Земли;
Δφ [рад] - угол при центре Земли, опирающийся на дугу l [м] или угловое расстояние от параллели текущей широты φТ до полюса.
Угловая скорость вращения судна от его движения по параллели направлена по оси вращения [Б.М.Яворский, А.А.Детлаф. Справочник по физике. - М.: «Наука», 1985. - 512 с.], то есть по оси Земли, и равна:
Вертикальная составляющая угловой скорости за счет движения судна по параллели (угловая скорость вращения меридиана в горизонтной системе координат) может быть представлена соотношением:
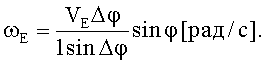
В то же время рассматриваемая часть корректирующего момента выражается соотношением:
где  (с учетом изложенного - это очевидное равенство).
(с учетом изложенного - это очевидное равенство).
Эти формулы полностью идентичны во всем диапазоне широт и являются вертикальной составляющей угловой скорости движения судна по параллели, то есть угловой скоростью вращения меридиана относительно вертикали в горизонтной системе координат. В расчетах они дают совершенно одинаковый результат вычисления угловых скоростей в пределах принятых округлений элементов референц-эллипсоида Красовского, что проверено как ручными расчетами, так и расчетами с помощью программы Mathcad. Такой результат естественен, поскольку формулы обратимы. Действительно
то есть отношение длины дуги, выраженной в единицах длины [м] к длине дуги в радианах, является радиусом окружности, следовательно, и радиусом кривизны дуги, то есть радиусом Земли. В то же время, как ранее изложено
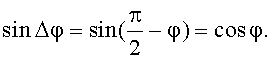
sin Δφ=sin .
.
Т.о. в новом виде изложено известное традиционное выражение, используемое во всех инерциальных навигационных системах, гироазимутах, ГАК и ГКУ как: 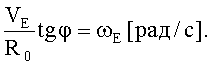
С этой точки зрения в электронных аппаратных схемах их применимость равнозначна. Однако представляемая формула имеет ряд преимуществ.
1. Данная формула более удобна при использовании в аналоговых электромеханических вычислительных схемах, поскольку в ней отсутствует величина tgφ, стремящаяся в высоких широтах к бесконечности, поэтому в приполюсных широтах возможна ее реализация. Таким образом указанные ранее недостатки электромеханических схем известных приборов полностью устраняются предлагаемой формулой.
2. Множитель
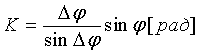
с увеличением широты стремится к единице. Таким образом, формула может быть аппаратно реализована практически до самого полюса. Точность расчета при этом не снижается, поскольку электрический сигнал на всех стадиях аппаратных вычислений остается достаточно высоким, так как его градиент остается практически постоянным с увеличением широты. Под градиентом здесь понимается величина сигнала на единицу измеряемой величины: скорости, расстояния, широты.
Более того, формула допускает значительное упрощение, поскольку для малых углов Δφ≈sinΔφ. По этой причине их отношение стремится к единице с увеличением широты. То же самое происходит с функцией sinφ. Поскольку в высоких широтах названный коэффициент К≈1, то его можно из расчетов исключить и использовать простейшее выражение:
 ,
,
 то есть вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели) и угловая скорость вращения судна вокруг оси Земли (в инерциальном пространстве) вследствие его движения по параллели становятся практически равными, что немаловажно при аппаратном решении задачи.
то есть вертикальная составляющая угловой скорости вращения судна при его движении по параллели (вращение меридиана в горизонтной системе координат вследствие движения судна по параллели) и угловая скорость вращения судна вокруг оси Земли (в инерциальном пространстве) вследствие его движения по параллели становятся практически равными, что немаловажно при аппаратном решении задачи.
Тогда, например, в широте уже 80° неучтенный дрейф гироазимута от этого допущения не превышает 0,015 градус/час, что на два порядка выше инструментальной точности известных приборов типа «Вега», в которых допустимый инструментальный дрейф составляет ±1 градус/час, и на порядок выше, чем у ГАК типа «Гюйс», допустимый дрейф ГА которых равен ±0,2 градус/час. В широте 85° неучтенный дрейф от названного упрощения составляет 0,012 градус/час и далее снижается практически до нуля.
3. В принципе формула аппаратно решаема и на полюсе: значение указанного коэффициента К и всей второй составляющей момента широтной коррекции равно нулю, что соответствует действительности, поскольку и числитель, и знаменатель равны нулю. Действительно: в числителе Δφ=0, а это означает, что все выражение равно нулю и к бесконечности не стремится, хотя в знаменателе как sinΔφ=0, так и l=0. Тем более, что пересечение полюса возможно только при движении судна по географическому меридиану, таким образом и значение скорости судна по параллели также равно нулю: VE=0.
4. Главным преимуществом предлагаемой формулы является возможность ее применения для аппаратного расчета долготы места судна, если использовать полный вектор угловой скорости движения судна по параллели, то есть угловую скорость вращения меридиана относительно оси Земли (в инерциальном пространстве). Поскольку она применима для автоматического получения и долготы, то, следовательно, применима и для автоматической выработки угла перехода и квазикурса для ведения аппаратного счисления в высоких широтах.
Совокупность отличительных и ограничительных признаков заявляемого изобретения - устройства, выполняющего функцию всеширотной коррекции гироазимуткомпаса, автоматической выработки координат места судна независимо от района плавания и квазигеографического курса в высоких и приполюсных широтах, его элементов и связей приводит к следующим положительным результатам:
- осуществление широтной коррекции во всех широтах, вплоть до полюса, позволяющее непрерывно вырабатывать географический курс от экватора до полюса;
- увеличение промежутков времени ручной коррекции ГАК при плавании в квазигеографической системе координат, так как ЧЭ непрерывно удерживается в географическом меридиане с точностью, определяемой только неучтенным дрейфом гироазимута. Для прототипа допустимое значение неучтенного дрейфа составляет
 ,
,
а допустимая величина отклонения ЧЭ, как отмечалось ранее, должна быть не более 30°. Таким образом, при оптимальном функционировании ГАК и неизменном дрейфе гироазимута необходимость в ручной коррекции наступит через 100-150 часов независимо от широты плавания в приполюсных широтах. Для аналога типа «Вeгa»
 ,
,
такая необходимость наступит через 20-30 часов. В то же время при существующем положении при плавании по географической параллели, например, в широте 89° со скоростью 15 узлов такая необходимость для обоих известных ГАК возникает менее чем через 2 часа;
- повышение надежности выработки момента широтной коррекции за счет создания заявляемого дублирующего канала в виде вычислительного устройства всеширотной коррекции гироазимуткомпаса, третьего суммирующего устройства, второго усилителя и второго переключателя, в совокупности с их связями;
- повышение точности расчета момента широтной коррекции, так как в заявляемом устройстве всеширотной коррекции гироазимуткомпаса и выработки квазигеографического курса в высоких и приполюсных широтах, то есть в квазигеографической системе координат, градиент сигнала остается практически постоянной величиной. Береговые испытания гироазимуткомпаса с рабочим названием «Вега-С» с электронной схемой обработки информации, в котором установлено заявляемое устройство, показали, что неучтенный дрейф ЧЭ в режиме ГА составляет ±0,05 [градус/час] во всех широтах, в то время как базовый комплект, один из названных аналогов «Вега», по техническим данным имеет остаточный дрейф ±1 [градус/час] в широтах до 70° и ±1,5 [градус/час] в широтах выше 70°. Приращение долготы вырабатывалось с точностью до ±0,7% на курсах, близких к 90-270°, и до 1,5% на курсах, близких к 0-180°;
- непрерывная автономная автоматическая выработка долготы, а в высоких широтах - угла перехода, что обеспечивает ведение счисления в квазигеографической системе координат;
- приобретение гироазимуткомпасами и гирокурсоуказателями возможности работать в квазигеографической системе координат в режиме «Гирокомпаса» автономно до широт, определяемых техническими условиями, так как центральный прибор в указанной системе координат продолжает вырабатывать географический курс, а заявляемое устройство в виде: устройства всеширотной коррекции гироазимуткомпаса, интегрирующего устройства, первого суммирующего устройства, устройства ручного ввода начальной долготы места судна, индикатора текущей долготы места судна, второго суммирующего устройства и первого переключателя, продолжает вырабатывать долготу места судна, которая в высоких широтах используется для выработки квазикурса, необходимого для управления судном в квазигеографической системе координат. Например, упомянутый гирокурсоуказатель ГКУ-1 по техническим условиям работает в режиме «Гирокомпаса» до широты 87°, но реализация этого режима неавтономная, а возможна только с помощью автопрокладчика;
- обеспечение в высоких широтах судовых потребителей как квазикурса, так и географического курса;
- приобретение гироазимуткомпасом функций автосчислителя, что способствует снижению негативного влияния человеческого фактора, так как обеспечивает дублирование процесса расчета координат и вводит дополнительный контроль за процессом счисления;
- сохранение указанных выше достоинств при использовании для построения аппаратной схемы ГАК как электромеханической, так и электронной элементной базы, чем достигается дополнительный эффект.
Вывод. Заявляемое изобретение вносит определенные эксплуатационные преимущества ГАК и ГКУ, а именно: обеспечение выработки географического курса во всех широтах; выработка долготы места судна и угла перехода к квазикурсу для ведения счисления в приполюсных широтах в квазигеографической системе координат; использование режима «Гирокомпас» до предельно высоких широт, обусловленных техническими возможностями прибора; снижение частоты ручной коррекции чувствительного элемента в режиме «Гироазимута» в высоких широтах в квазигеографической системе координат; ведение автоматического счисления путем выработки географических координат (широты и долготы) места судна, что снижает вероятность человеческой ошибки и повышает надежность счисления; выработка географического курса и географических направлений на объекты при плавании судна в приполюсных районах, что важно для выполнения судном специальных задач, особенно если такие объекты находятся за пределами квазигеографической системы координат; повышение надежности азимутальной широтной коррекции путем введения дублирующего канала выработки азимутального канала широтной коррекции ГАК; возможность реализации заявляемого устройства с помощью схем на электромеханических элементах.
Заявляемое устройство гироазимуткомпас с автоматической выработкой навигационной информации поясняется следующими графическими материалами.
На фиг.1 представлена блок-схема, позволяющая реализовать заявляемое устройство; на фиг.2 показан график аппаратного расчета радиуса параллели.
Заявляемое устройство с целью выполнения всеширотной коррекции гироазимуткомпаса и автоматической выработки квазигеографического курса в высоких и приполюсных широтах (фиг.1) содержит центральный прибор 1 с гироскопическим чувствительным элементом (не показан); блок электронный 2, формирующий сигналы коррекции гироскопического ЧЭ; выходы I и II блока электронного 2 электрически сообщены соответственно с входами I и II центрального прибора 1; пульт оператора 3, содержащий узел 4 ручного ввода начальной широты φH места судна через вход I в известное устройство 5 автоматической коррекции широты, состоящее из последовательно соединенных усилителя, интегрирующего устройства и суммирующего устройства (не показаны) [см. заявку №2010103270/28(004528)]. С его выхода в блок электронный 2 через вход I вводится напряжение UφТ, пропорциональное текущей широте места судна, а с выхода I блока электронного 2 дополнительно на вход II устройства 5 автоматической коррекции широты поступает напряжение ULkZ, пропорциональное вертикальному моменту скоростной коррекции, следовательно, и меридиональной составляющей VN скорости судна. Пульт оператора 3 содержит также узел 6 ручного ввода скорости, с выхода которого напряжение UV, пропорциональное скорости судна, поступает через вход II в блок электронный 2; блок 7 внешнего источника информации, содержащий лаг 8 для автоматического ввода измеренной скорости судна через вход III в блок электронный 2 и приемоиндикатор 9 спутниковой навигационной системы, также подключенный к блоку электронному через входы IV и V. Выход центрального прибора 1 имеет электрическое сообщение с трансляционным устройством курса 10 и репитерной системой (не показана). В заявляемом устройстве для расчета корректирующего момента Lky широтной коррекции ГАК дополнительно установлено обычное вычислительное устройство 11 всеширотной коррекции гироазимуткомпаса, в которое осуществляется ввод следующей информации в виде напряжения, пропорционального указанным ниже величинам: на его вход I подается напряжение UV, пропорциональное скорости судна, с выхода узла 6 ручного ввода скорости, находящегося в пульте оператора 3; или оно же на его вход II из блока внешнего источника информации 7 от лага 8 автоматически; на вход III устройства 11 поступает напряжение UφT, пропорциональное текущей широте места судна с выхода устройства 5 автоматической коррекции широты, а на вход IV напряжение UГК географического курса с выхода центрального прибора 1.
С первого выхода I вычислительного устройства 11 сигнал UωE0, пропорциональный полному вектору угловой скорости ωE0 движения судна по параллели, то есть в проекции на ось Земли (фиг.2), поступает на первый усилитель 12, где происходит преобразование сигнала в градусную меру. С выхода первого усилителя 12 напряжение U1ωE0 в новом масштабе поступает на вход интегрирующего устройства 13. С его выхода снимается напряжение, пропорциональное приращению географической долготы UΔλ, которое поступает на вход I первого суммирующего устройства (сумматора) 14. На вход II названного первого сумматора 14 поступает напряжение UλH, пропорциональное начальной долготе места судна, установленной вручную с помощью узла 15 ручного ввода начальной долготы λН. При этом в частном случае данное устройство может быть установлено в пульт оператора 3. После их суммирования в первом суммирующем устройстве (сумматоре) 14 напряжение UλТ, пропорциональное текущей долготе λТ места судна (или текущему углу перехода QT в квазигеографической системе координат), через его выход поступает на индикатор 16 текущей долготы λT места судна и на вход I второго сумматора 17. Дополнительно к выходу центрального прибора подключен вход I первого переключателя 18. Первый переключатель 18 имеет три положения (не показано). В первом положении через его вход I и выход I напряжение UГК, пропорциональное географическому курсу ГК, передается с выхода центрального прибора 1 на трансляционное устройство 10 курса судна и на репитеры курса (не показаны). При переходе в квазигеографическую систему координат первый переключатель 18 вручную переводят из первого положения во второе положение. При этом напряжение географического курса UГК с выхода центрального прибора через вход I и выход II первого переключателя 18 поступает на II вход второго сумматора 17, в котором в результате сложения географического курса ГК с полученной текущей долготой λT места судна (текущим углом перехода QT) образуется напряжение UKg, пропорциональное квазигеографическому курсу, которое подается на выход второго сумматора 17. Данное напряжение через вход II и выход I первого переключателя 18 подается на трансляционное устройство 10 курса судна и на репитеры курса (не показаны). В третьем положении первый переключатель 18 используют также в квазигеографической системе координат. При этом с выхода I первого переключателя 18 для управления судном от второго сумматора 17 поступает информация о квазикурсе Kg на трансляционное устройство курса 10 и на путевые репитеры курса (не показаны), а с его выхода III поступает информация от центрального прибора 1 судовым потребителям географического курса ГК, например, на пеленгаторные репитеры, радиолокационную станцию, в другие системы судовой автоматики (не показаны). Схему подключения выхода III первого переключателя 18 монтируют при установке рассматриваемого ГАК в зависимости от конкретных задач, которые должно решать судно в высоких широтах.
Напряжение UωE, пропорциональное вертикальной составляющей угловой скорости вращения судна при его движении по параллели, и Uω2, пропорциональное вертикальной составляющей угловой скорости вращения Земли, с соответствующих выходов II и III вычислительного устройства 11 поступают соответственно на входы I и II третьего суммирующего устройства 19 для формирования корректирующих моментов. С выхода третьего суммирующего устройства 19 суммарное напряжение UωΣ, пропорциональное сумме вертикальных составляющих угловых скоростей вращения меридиана от движения судна по параллели (фиг.2) и от вращения Земли, передаются на второй усилитель 20, где производится его умножение на величину кинетического момента гироскопа Н [Н м/с]. Дополнительно в схеме установлен второй переключатель 21 на два положения (не показаны). В первом положении второго переключателя 21 сформированное напряжение ULky, пропорциональное моменту широтной коррекции, с выхода второго усилителя 20 подается на вход I второго переключателя 21, а с его выхода указанное напряжение через вход II центрального прибора 1 поступает на датчик горизонтальных моментов (не показан) для широтной коррекции ЧЭ. Во втором положении второго переключателя 21 напряжение ULky поступает на его вход II уже с выхода II блока электронного 2, а с выхода второго переключателя 21 указанное напряжение также через вход II центрального прибора 1 поступает на датчик горизонтальных моментов (не показан) для широтной коррекции чувствительного элемента (не показан). При этом при достижении во время плавания в широтах выше 75° поправки гироазимута значения более 20° возникает необходимость в ее ручной коррекции. Для этой цели предусмотрено устройство 22 ручной коррекции, присоединенное своим выходом к входу II центрального прибора 1. При ручной коррекции гироазимута с выхода устройства 22 ручной коррекции подается напряжение UK на вход II центрального прибора 1.
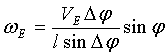
Заявляемый гироазимуткомпас с функцией всеширотной коррекции гироазимуткомпаса, автоматической выработки координат места судна и географического и квазигеографического курса в высоких и приполюсных широтах используют следующим образом. Перед выходом в море при штатном запуске осуществляют ручной ввод начальной широты φH и начальной долготы λН места судна через соответствующие узлы 4 и 15. С началом движения судна вводится скорость или вручную с узла 6 ручного ввода скорости в блок электронный 2 через его вход II и в вычислительное устройство 11 всеширотной коррекции гироазимуткомпаса через его вход I, или автоматически от лага 8: в блок электронный 2 через его вход III, а в вычислительное устройство 11 всеширотной коррекции гироазимуткомпаса через его вход II. Поскольку с началом движения изменяются координаты и курс судна, то на вход III вычислительного устройства 11 всеширотной коррекции гироазимуткомпаса с выхода устройства 5 автоматической коррекции широты поступает напряжение UφT текущей широты места судна, а на его вход IV с выхода центрального прибора I поступает напряжение UГК, пропорциональное географическому курсу ГК судна. Вычислительное устройство 11 всеширотной коррекции гироазимуткомпаса рассчитывает вертикальную составляющую угловой скорости от движения судна по параллели по следующей формуле:
где ωE [рад/с] - вертикальная составляющая угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат);
VE [м/с] - линейная скорость движения судна по параллели;
Δφ [рад] - угловое расстояние от текущей широты φT места судна до полюса, которое составляет величину:
l - [м] расстояние по меридиану от текущей широты φT до полюса;
π=3,14 [рад]=180°,
и с выхода II оно подает пропорциональное напряжение UωE на вход I третьего сумматора 19.
Одновременно вычислительное устройство 11 всеширотной коррекции гироазимуткомпаса рассчитывает вертикальную составляющую угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат) по формуле:
ω2=ω0sinφ [рад/с],
где ω2 [рад/с] - вертикальная составляющая угловой скорости вращения Земли (угловой скорости вращения меридиана в горизонтной системе координат);
ω0 [рад/с] - угловая скорость вращения Земли в инерциальном пространстве;
φ [градусы, минуты] - широта плавания,
подавая с выхода III на вход II третьего сумматора пропорциональное напряжение Uω2. С выхода третьего сумматора 19 сумма двух напряжений UωΣ, пропорциональных сумме угловых скоростей
ωΣ=(ω2+ωE) [рад/с],
поступает на вход второго усилителя 20, где происходит его умножение на кинетический момент гироскопа Н. Полученное в нем напряжение ULky, пропорциональное моменту широтной коррекции, подается на вход I второго переключателя 21. Вариант широтной коррекции выбирает судоводитель. Если установить второй переключатель 21 в первое положение, то напряжение ULky, пропорциональное моменту широтной коррекции, подается с выхода второго усилителя 20 на вход I второго переключателя 21, а с его выхода - на вход II центрального прибора 1 для осуществления широтной коррекции гироскопического ЧЭ, что выражено зависимостью:

где Н [H·м·с] - кинетический момент гироскопа.
При этом канал широтной коррекции блока электронного 2 (не показан) находится в рабочем резерве.
При установке второго переключателя 21 во второе положение напряжение ULky, пропорциональное моменту широтной коррекции Lky, поступает с выхода II блока электронного 2 на вход II переключателя 21, а с его выхода, соответственно, на вход II центрального прибора 1 для широтной коррекции гироскопического ЧЭ. Вход I переключателя 21 отключается, а весь канал всеширотной коррекции гироазимуткомпаса переходит в рабочий резерв.
Независимо от положения переключателя 21 в вычислительном устройстве всеширотной коррекции гироазимуткомпаса рассчитывается полный вектор угловой скорости вращения судна вокруг оси Земли (в инерциальном пространстве) вследствие его движения по параллели (фиг.2):
Напряжение UωE0, пропорциональное указанной угловой скорости, подается с выхода I вычислительного устройства 11 всеширотной коррекции гироазимуткомпаса на первый усилитель 12, где происходит преобразование электрического сигнала в градусную меру, исходя из выражения:
MωE=57,3ωE0 [градус/с]
где М=57,3° - количество градусов в одном радиане.
Напряжение U1ωE0 в новом масштабе с его выхода поступает на вход интегрирующего устройства 13, с выхода которого снимается напряжение UΔλ, пропорциональное приращению географической долготы Δλ, которое поступает на вход I первого сумматора 14. На второй вход II названного первого сумматора 14 поступает напряжение UλH, пропорциональное начальной долготе места судна λн, установленной вручную, как отмечалось ранее, при запуске ГАК с выхода узла 15 ручного ввода долготы. После суммирования электрических сигналов в первом сумматоре 14 текущая долгота λт будет равна:
λT=(λH+Δλ) [градусы, минуты],
и пропорциональное ей напряжение UλT с выхода первого сумматора 14 подается на вход индикатора текущей долготы 16, где отображается текущая долгота λT места судна, и на вход I второго сумматора 17. Географический курс ГК при этом передается с выхода центрального прибора 1 на вход I первого переключателя 18, а с его первого выхода I на транслятор курса 10 и репитеры курса. Так используется ГАК в низких и средних широтах.
С приходом в приполюсные районы гироскопический ЧЭ центрального прибора 1 переводят на работу от вычислительного устройства всеширотной коррекции гироазимуткомпаса 11 и автоматической выработки квазигеографического курса в высоких и приполюсных широтах, если это не было сделано ранее. Для этого второй переключатель 21 устанавливают во второе положение. Тогда с его выхода напряжение ULky, сформированное вычислительным устройством 11 всеширотной коррекции гироазимуткомпаса, третьим сумматором 19 и вторым усилителем 20, поступает на вход II центрального прибора 1 для осуществления коррекции гироскопического ЧЭ. После чего в диапазоне высоких широт от 80 до 85° осуществляют переход на ведение счисления в квазигеографической системе координат. Для этого первый переключатель 18 переводят во второе положение. В этом случае напряжение UГК центрального прибора 1, пропорциональное географическому курсу ГК, через вход I и выход II первого переключателя 18 поступает на вход II второго сумматора 17, где суммируется с напряжением UλТ, то есть напряжением текущего угла перехода Qт. В результате аппаратного суммирования решается уравнение:
Kg=ГК+λT=ГК+Q [градусы],
и квазикурс судна с выхода второго сумматора 17 через вход II и выход I первого переключателя 18 подается на трансляционное устройство курса 10 и репитеры. Таким образом квазикурс сформирован, и ГАК переведен на работу в квазигеографической системе координат.
На судах, где имеются судовые потребители географического курса при плавании судна в приполюсных районах, первый переключатель 18 устанавливают в третье положение. В этом случае квазикурс вырабатывается и транслируется, как выше указано, а с третьего выхода первого переключателя 18 транслируется географический курс названным судовым потребителям.
Гироазимуткомпас может использоваться как в режиме «Гирокомпаса», так и в режиме «Гироазимута». Переход из режима «Гирокомпас» в режим «Гироазимут» осуществляют, как правило, с приходом в широту, предельную для работы гирокомпаса, так как в режиме «Гирокомпаса» не возникает необходимость в ручной коррекции ЧЭ. Как отмечалось ранее различные ГАК и ГКУ могут работать в режиме «Гирокомпас» до широт 75-87°, выше которых гирокомпас теряет компасные свойства. Теперь положение ЧЭ центрального прибора 1 независимо от курсов и скорости судна будет удерживаться в географическом меридиане с точностью, определяемой неучтенным дрейфом гироазимута. Когда поправка гироазимута достигнет значения более 20° с помощью устройства 22 ручной коррекции, чувствительный элемент приводят в географический меридиан. Таким путем используется заявляемое устройство.
Испытание опытной модели заявляемого изобретения в лабораторных условиях показало достижение следующих технических результатов: осуществление широтной коррекции во всех широтах, вплоть до широты 90° (до полюса), чем обеспечивается непрерывная выработка географического курса от экватора до полюса; увеличение промежутков времени ручной коррекции ГАК в режиме ГА; повышение надежности выработки момента широтной коррекции за счет создания заявляемого дублирующего канала; повышение точности расчета момента широтной коррекции; непрерывная автономная автоматическая выработка долготы, а в высоких широтах - угла перехода к квазикурсу, что обеспечивает ведение счисления в квазигеографической системе координат; приобретение гироазимуткомпасом функций автосчислителя, что способствует снижению негативного влияния человеческого фактора, так как выполняет дублирование процесса расчета координат и обеспечивает дополнительный контроль и надежность счисления; обеспечение в высоких широтах потребителей как квазикурса, так и географического курса; возможность использования ГАК в режиме «Гирокомпаса» в широтах выше 85°, если позволяют его технические условия; возможность использования для построения схемы ГАК как электромеханической, так и электронной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ШИРОТЫ МЕСТА СУДНА | 2010 |
|
RU2419767C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| ГИРОКОМПАС | 1992 |
|
RU2079106C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| Автопрокладчик | 1979 |
|
SU836524A1 |
| Способ определения поправки курса двухрежимного одногироскопного курсоуказателя | 1991 |
|
SU1838760A3 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
Изобретение относится к области навигационного приборостроения подвижных объектов и может найти применение во всех районах Мирового океана, включая высокие и приполюсные широты. Технический результат - расширение функциональных возможностей за счет выработки географического курса во всех широтах, включая высокие и приполюсные широты. Для достижения данного результата гироазимуткомпас дополнительно содержит устройство автоматической коррекции широты места судна и вычислительное устройство всеширотной коррекции гироазимуткомпаса, вырабатывающее сигналы, пропорциональные вертикальной составляющей угловой скорости вращения Земли и вертикальной составляющей угловой скорости движения судна по параллели. Сумма этих сигналов дает выработку момента азимутальной широтной коррекции чувствительного элемента центрального прибора. Вычислительное устройство формирует напряжение, пропорциональное угловой скорости движения судна относительно оси Земли, которое при интегрировании в интеграторе задает приращение долготы, а при суммировании этого приращения с данными начальной долготы вырабатывает текущую долготу места. 2 ил.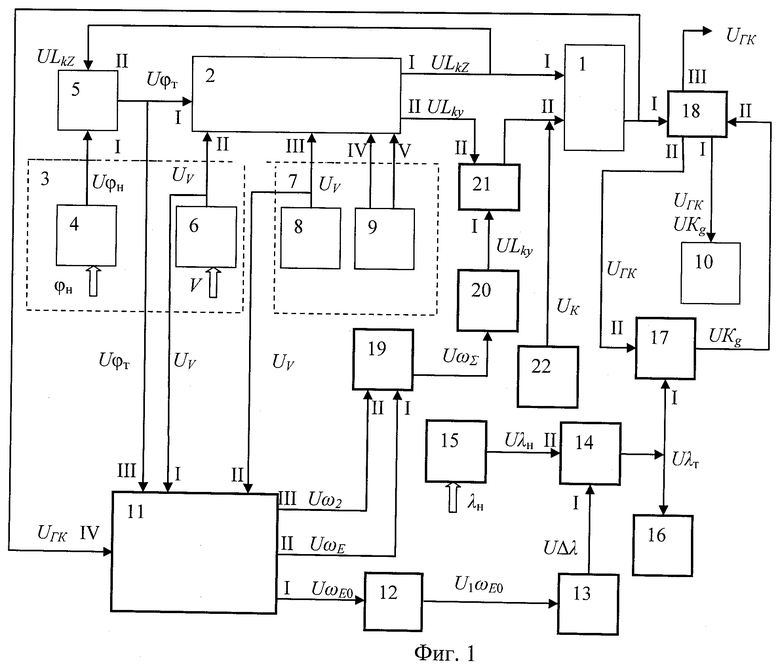
Гироазимуткомпас с автоматической выработкой навигационной информации, содержащий пульт оператора, имеющий узлы ручного ввода данных начальной широты места и скорости судна, блок электронный, блок внешнего источника информации, включающий лаг и приемоиндикатор спутниковой навигационной системы, центральный прибор с гироскопическим чувствительным элементом, трансляционное устройство курса судна с репитерами курса и устройство автоматической коррекции широты места судна, при этом первый выход блока электронного соединен с первым входом центрального прибора, второй выход блока электронного имеет электрическую связь со вторым входом центрального прибора, а выход центрального прибора имеет электрическую связь с трансляционным устройством курса судна, узел ручного ввода широты места судна пульта оператора подключен к первому входу устройства автоматической коррекции широты места судна, а выход устройства автоматической коррекции широты места судна подключен к первому входу блока электронного, узел ручного ввода скорости судна пульта оператора подключен ко второму входу блока электронного, лаг и приемоиндикатор спутниковой навигационной системы блока внешнего источника информации подключены к блоку электронному соответственно через его третий и четвертый с пятым входы, первый выход блока электронного дополнительно соединен со вторым входом устройства автоматической коррекции широты места судна, отличающийся тем, что он дополнительно содержит вычислительное устройство всеширотной коррекции гироазимуткомпаса, интегрирующее устройство, первое, второе и третье суммирующее устройство, первый и второй усилитель, первый и второй переключатель, узел ручного ввода данных начальной долготы места судна, индикатор текущей долготы места судна и устройство ручной коррекции гироазимута, при этом первый вход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен с выходом узла ручного ввода скорости судна пульта оператора, его второй вход соединен с выходом лага блока внешнего источника информации, его третий вход соединен с выходом устройства автоматической коррекции широты места судна, а его четвертый вход соединен с выходом центрального прибора; первый выход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен со входом первого усилителя, выход которого соединен со входом интегрирующего устройства; выход интегрирующего устройства соединен с первым входом первого суммирующего устройства, второй вход которого соединен с выходом узла ручного ввода данных начальной долготы места судна; выход первого суммирующего устройства соединен с входом индикатора текущей долготы места судна, а также с первым входом второго суммирующего устройства; дополнительно к выходу центрального прибора подключен первый вход первого переключателя, имеющего три положения, который содержит первый выход, соединенный со входом трансляционного устройства курса судна, второй выход первого переключателя соединен со вторым входом второго суммирующего устройства, третий выход первого переключателя соединен со входами судовых потребителей географического курса в квазигеографической системе координат, а выход второго суммирующего устройства соединен со вторым входом первого переключателя; второй выход вычислительного устройства всеширотной коррекции гироазимуткомпаса соединен с первым входом третьего суммирующего устройства, а его третий выход соединен со вторым входом третьего суммирующего устройства, выход которого соединен со входом второго усилителя, выход которого, в свою очередь, соединен с первым входом второго переключателя, второй вход которого соединен со вторым выходом блока электронного, причем выход второго переключателя соединен со вторым входом центрального прибора и дополнительно второй вход центрального прибора соединен с выходом устройства ручной коррекции гироазимута.
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ШИРОТЫ МЕСТА СУДНА | 2010 |
|
RU2419767C1 |
| RU 2056037 С1, 10.03.1996 | |||
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| СМИРНОВ Е.Л., А.В.ЯЛОВЕНКО А.В, ЯКУШЕНКОВ А.А | |||
| Технические средства судовождения | |||
| Теория | |||
| - М.: Транспорт, 1988, 376 с | |||
| ВОРОНОВ В.В., ПЕРФИЛЬЕВ В.К., ЯЛОВЕНКО А.В | |||
| Технические средства судовождения | |||
| Конструкция и эксплуатация | |||
| - М.: Элмор, 1988, 336 с | |||
| КОГАН Б.М., ЧИЧИНАДЗЕ М.В | |||
| Судовой гироазимуткомпас «Вега» | |||
| - М.: Транспорт, 1983, 200 с. | |||

