Изобретение относится к навигационным приборам, осуществляющим счисление географических координат и прокладку курса подвижного объекта на карте.. Известны автопрокладчики типа АП-2, АП-3-, АП-4. В состав таких автопрЪкладчиков входят автомат счис.ле ния составляющих пути по параллели и меридиану, подключенные к нему устройство прокладки курса и устройство вычисления и Отображения географичес ких координат. Недостатком таких автопрокладчиков является невозможност автоматической коррекции курсопрокладчика и вычислителя координат 111 Известен также автопрокладчик,содержащий автомат счисления составляющих пути по параллели и меридиану, масштабный узел, задатчик масштаба и широты главной параллели, автоматический планшет, блок реверса механизма отработки разности широт, блок реверса механизма отработки отшествия вычислитель приращений географических координат, блоки управления знаками приращений широты и долготы, накопители широты и долготы, задатчики начальной широты и долготы и устройство отображения текущих координат,nt.Hчем первые входы масштабного узла к вычислители приращений географических координат подключены к выходу накопителя широты, блоки реверса механизмов отработки разности широт и отшествия первыми входами подключены к соответствснньм выходам масштабного узла, а выходами подключены к автоматическому планшету, второй вход масштабного узла подключен к задатчику масштаба и широты главной параллели, первые входы блоков управления знаками приращений широты и долготы подключены к соответственным выходам вычислителя приращений географических координат, а выходами подключены к первым входам соответственных некопителей координат, гторые входы которых подключены, сосгветственно к задатчикам начальной широты и дсшготы, а выходы подключены к устройству отображения текущих координат 2} , Такой автопрок.а дчик может р ботать только по пр ф ащениям линейных, но не угловых перемещений подвижного объекта, кг оме того, корракции положения пишус. ;го узла и данных устройства о ображения текущил координат пpoизвJдитcя вручную.
В настоящее время есть тенденция комплексирования навигационных источников информации. Так комплексируются устройства, обеспечивающие, непрерывное получение текущих координат, имеющие свойство накапливать ошибку счисления местоположения, и устройства эпизодического получения координат, например от спутника, один раз в час, при его появлении на горизонте, и т. д. Кроме того, в шельфовой зоне лучшую точность обеспечивают позиционные радионавигационные станции, что выявляет потребность в этом случае координатного входа в автопрокладчик. При удалении от шельфовой зоны лучшую точность определения местоположени обеспечивают.навигационные системы, работающие от приращений пути и имеющие возможность периодической коррекции. Таким образом, потребность практики выявляет необходимость расширения функции автопрокла:дчика с тем, чтобы была обеспечена и возможность его автоматической коррекции, и возможность работы от задатчиков географических координат.
Целью настоящего изобретения является повышение точности счисления географических координат.
Указанная цель достигается тем, что в автопрокладчик дополнительно введены блок задания точных географических координат, устройство коррекции составляющей пути по параллели, устройство коррекции составляющей пути по меридиану, суммирующее устройство канала широты и суммируюадее устройство канала долготы, причем первый вход суммирующего устройства канала долготы подключен к первому выходу автомата счисления составляющих пути по параллели и меридиану, второй вход его подключен к первому выходу устройства коррекции составляющей пути по параллели, а выход подключен ко второму входу вычислителя приращений географических координат и к третьему входу масштабного узла, второй выход устройства коррекции составляющей пути по параллели подключен ко вторым входам блока реверса механизма отработки отшествия и блока управления знаками приращений долготы, а первый и второй входы подключены соответственно к первому входу и выходу накопителя долготы, третий вход подключен к первому выходу блока задания точных географических координат, при этом второй выход автомата счисления подключен к первому входу суммирующего устройства канала широты/ второй вход которого подключен к первому выходу устройства коррекции составляющей пути по меридиану, а выход его подключен к третьему входу вычислителя приращений географических координат у к четвертому входу маештабного узла, второй выход устройства коррекции составляющей пути по ме ридиану подключен ко вторым входам блока реверса механизма отработки разности широт и блока управления знаками-приращений широты, а первый и второй входы подключены соответственно к первому входу и выходу накопителя широты, третий вход подключен ко второму выходу блока задания точных географических координат.
Кроме того, устройства коррекции составляющих пути по параллели и меридиану включают в себя накопитель географической координаты, устройство сравнения, первый и второй конъюнкторы и задатчик скорости коррекции, причем первый вход устройства коррекции составляющей пути подключен к первому входу первого конъюктора, второй вход подключен к первому вхоДУ .устройства сравнения, третий вход подключен к первому входу накопителя географической координаты, второй выход устройства коррекции составляющей пути подключен к первому входу устройства сравнения, первый же выход устройства коррекции составляю- . щей пути подключен к выходу второго конъюнктора, при этом второй выход устройства сравнения подключен к первому входу второго конъюнктора, а второй вход второго конъюнктора подключен к задатчику скорости коррекции, третий выход устройства сравнения подключен ко второму входу первого конъюнктора, выход же первого конъюнктора подключен ко второму входу накопителя географической координаты, а выход накопителя подключен ко второму входу устройства сравнения.
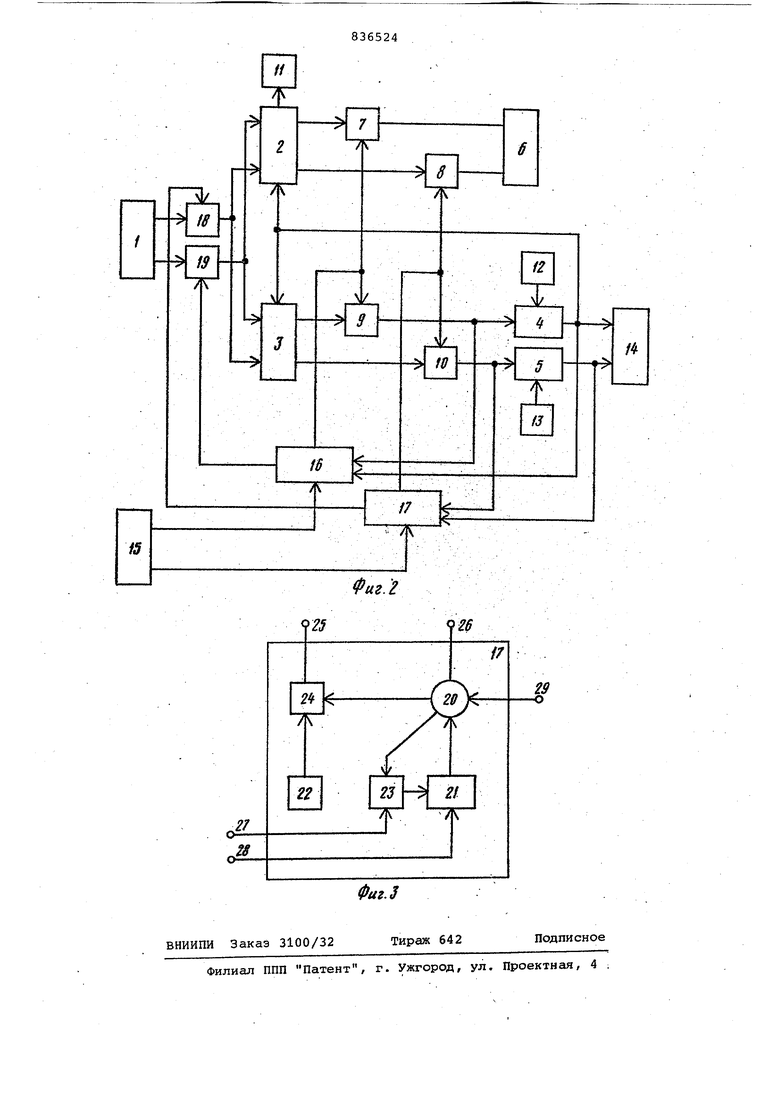
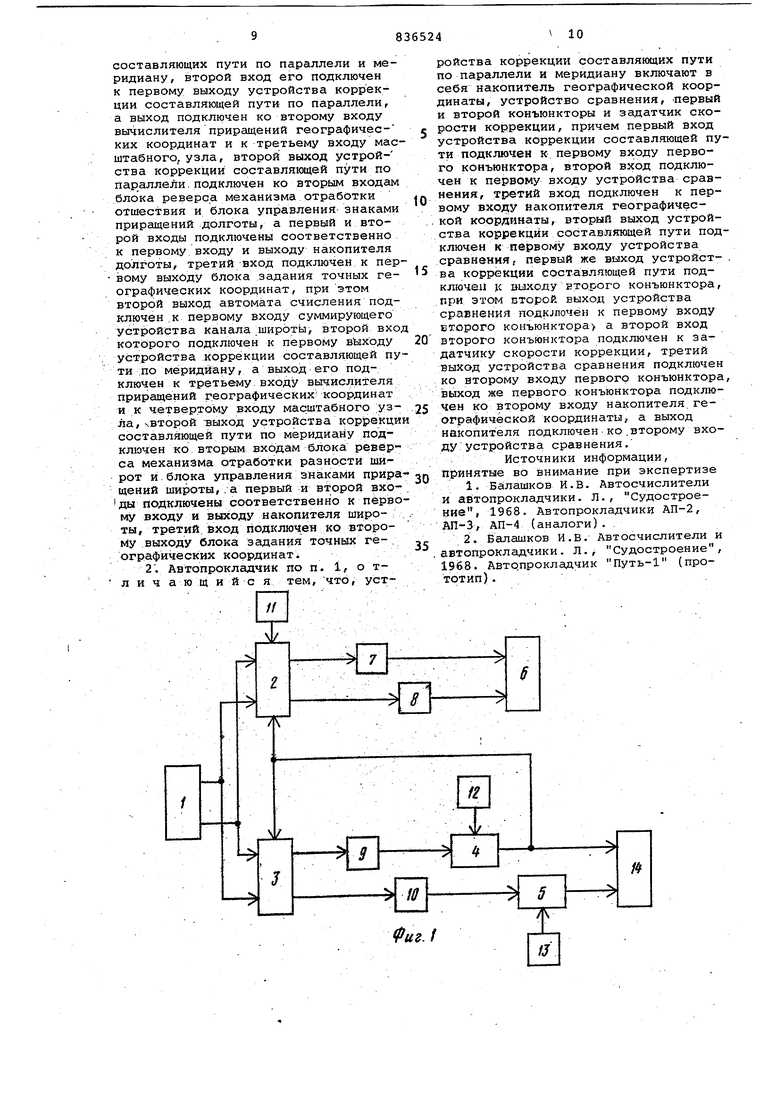
На фиг. 1 представлена структура прототипа, автопрокладчика Путь-1; на фиг. 2 - представлена структура предлагаемого автопрокладчика; на фиг. 3 представлена структура устройства коррекции составляющейпути.
Автопрокладчик содержит автомат счисления 1 составляющих пути по параллеяи и меридиану, масштабный узел 2, вычислитель 3 приращений географических координат, накопитель 4 широты, накопитель 5 долготы, автоматический планшет 6, блок 7 реверса механизма отработки разности широт, блок 8 реверса механизма отработки отшествия, блок .9 управления знаками приращений широты, блок 10 управления знаками приращений долготы, задатчик 11 масштаба и широты главной параллели, задатчик 12 начальной широты, згщатчик 13 начальной долготы, устройство отображения 14 текущих координат, блок 15 задания точных географических координат, устройство 16 коррекции составляющей пути по меридиану, устройство 17 коррекции составляющей пути по параллели, суммирующее устройство 18 канала долготы, суммирующее устройство 19 канала широты.
Устройство коррекции составляющих пути по параллели и меридиану включают- в себя устройство сравнения 20, накопитель 21 географической координаты, задатчик 22 скорости коррекции первый конъюнктор 23, второй конъюнктор 24, информационный выход 25, знаковый выход 26, первый вход 27, вт.орой вход 28, третий вход 29.
Автопрокладчик представляет собой систему из двух аппаратов. Из аппаратон прокладки курса и аппарата счисления географических координат. Оба аппарата построены на базе цифровых элементов и работают с одинаковой точностью. Причем инструментальные погрешности .как по величине, так и п знаку у обоих приборов близки друг к другу. Таким образом, замыкая обратной связью аппарат счисления географических координат и корректируя его тем самым корректируем и аппарат прокладки курса в силу синхронности его работы с аппаратом счисления географических координат. Несоответствие показаний первого и второго аппаратов после коррекции определится только погрешностью их синхронизации, которая может быть уменьшена до погрешности, неразличимой в процессе работы с картой. Так для карты масштаба 1:200 тыс можно задаваться погрешностью синхронизации до 200 м пути, что будет соответствовать 1мм на карте, явно неразличимому. Аппарат счисления географических координат замыкается обратной связью по каналу ширины и по каналу долготы, следовательно, коррекция аппарата прокладки курса производится также по двум каналам: по каналу разностной широты и поканалу отшествия.
Автономно аппарат прокладки курса функционирует следующим образом. Приращения составляющих пути по параллели ЛОТШ и меридиану д РШ поступают из автомата счисления 1, через суммирующие устройства 18, 19, на масштабный узел 2, в который также подаётся из задатчика 11 масштаб . главной параллели широты главной параллели Ч. , кроме того на него поступает текущая широта w из накопителя. 4 широты, масштабный узел вычисляет масштаб текущий М f (Чгп гп .т) Последняя запись говорит о том, что масштаб текущий может быть вычислен как по формуле шара, так и по формулам эллипсоида. Но в таком случае вычисление географических координат также должно вестись по собственнным формулам,- т.е. должна быть одна идея построения автопрокладчика/ или в предположении, что Земля есть шар, или в предположении, что Земля имеет форму эллипсоида.
В масштабном же узле вычисляются значения приращений разности широт ДРШ и отшествия ), в текущем масштабе карты по формулам дРШт ДРШ MT
д.ОТШт дОТШ- Мг
Приращения дРЩ- и ДОТШ поступают через блоки реверса 7 и 8, где им придаются соответствующие знаки, на автоматический планшет 6, который интегрирует эти приращения.
Автономно аппарат счисления географических координат функционирует следующим образом. Приращения составляющих пути по параллели ДОТШ и меридиану лРШ поступают от автомата счисления 1 через сумматоры 18, 19 на вычислитель приращений географических координат, вычисляющий приращение широты Л и приращения долготыдЛ по зависимостям шара или эллипсоида. Здесь также предположения о форме Земли должны быть единообразными и при реализации устройства 3 и при реализации устройства 2. Прирагдения координат через знаковые блоки 9, 10 поступают с соответствующими знаками на счетные входы накопителей 4 и 5, где они суммируются с учетом знаков с начальными координатами, поступившими от задатчиков 12, 13. Устройство отображения 14 индицирует текущие значения географических координат. Работа сумматоооБ 18, 19 заключается в пропускании входной информации на выход. Работа блока 15 заключается в периодической выдаче точных географических координат на устройства коррекции 16 и 17. Функционирование устройств коррекции 16 и 17 происходит одинаково. Так устройство. 17 функционирует в автономном режиме следующим образом, в накопитель 21 заносится через блок 15, . перед началом работы автопрокладчика величина координаты, а именно начальная долгота, равная величине координаты, заносимой в накопитель 5. В процессе работы автопрокладчика информация на накопители 21 и 5 приходит от блока 10, одинаковая по величине и знаку, и таким образом устройство сравнения 20 вьщает сигнал равенства на конъюнктор 23, поддерживая- его в открытом состоянии, а сигнал неравенства устройства сравнения 20 на конъюнктор 24 не поступает. Таким образом конъюнктор 24 «е разрешает прохождение сигналов от задатчика 22, который для цифрового автопрокладчика представляет генератор частоты .
Функционирование автопрокладчика
в режиме отработки данных, поступающих от автомата счисления 1 составляющих пути.
В этом режиме аппарат прокладки курса вычерчивает курс судна на карте, аппарат счисления координат вычисляет и отображает координаты судна, устройства коррекции 16 и 17 работают синхронно с накопителями широ ты 4 и долготы 5, накапливая координаты, на суммирующие устройства 18, 19 поступает информация только от автомата счисления 1. Блок 15 не функционирует. Функционирование автопрокЛадчика в- режиме отработки данных, поступающих от блока 15.задания координат. Если частота выдачи координат из блока 15 достаточно велика, то в этом случае автомат счисления 1 можно вообще отключить и автопрокладчик будет.отрабатывать угловые величины, а именно, поступающие от блока 15 те кущие широту и олготу. Аппарат прокладки курса в этом случае прокладывает курс от физически других источников навигационной информации, не меняя свою.структуру. При редкой выдаче координат из блока 15 будет про исходить, собственно , коррекция автопрокладчика по данным блока 15. Эти данные можно вводить как вручную так и автоматически. При поступлении координат из блока 15 на устройства коррекции 16 и 17, отличных от координат, накопленных в накопителях 4 и 5, устройства сравнения 20 блочков коррекции 16 и 17 закроют конъюнкторы 23 и откроют конъюнкторы 24. Из задатчиков 22 на сумматоры 18 и 19 поступают сигналы, физически представленные в форме сигналов автомата счисления 1, величины которых определяют скорость коррекции. Собственно, задатчик 22 может вьадавать любые сигналы, схожие с сигналами автомата 1, но для быстрой отра рассогласования в координатах между накопителями 4,5 аппарата счисления координат и накопителями 21 устройств коррекции 16 , 17 эти сигналы должны быть, по возможности, больше. Так, в предлагаемом автопрокладчике скорость коррекции соответствует 250 узлам, И она ограничена только скоростными возможностями аппарата прокладки курса. Знаковые выходы блоков коррекции 16 и 17 управляют блоками 7-10. Информационные и знаковые выходы блоков коррекции полностью определяют в каком направлении и на сколько должны быть откор ректиррваны и положение карандаша пишущего устройства автоматического планшета б и показания устройства отображения 14. . Таким образом,, корректируя автомат счисления координат не просто сменой состояний его накопителей 4, 5, а путем воздействия на сумматоры 18, 19 произвольным сигналом, тем самым корректируем и аппарат прокладки курса в силу синхронизации его работы с аппаратом счисления координат и тем самым обогащаем функции автопрокладчика, придавая ему способность отрабатывать перемещения, заданные не только в линейной, но и в угловой форме. Потребности детального изучения морей и океанов, их экономическое освоение определили комплек.сное использование различных навигационных датчиков и аппаратуры обработки навигационной информации. В состав разрабатываемой геофизической аппаратуры входит и предлагаемый автопро-. кладчик. Расширение функций автопрокладчика позволит подключать его и к допплер-лагу, например в открытом море, и к специализированной ЭВМ, работающей по данным позиционных систем местоопределения. Формула изобретения 1. Автопрокладчик, содержащий автомат счисления составляющий пути по параллели и меридиану, масштабный узел, задатчик масштаба и широты главной параллели, автоматический планшет, блок реверса механизма отработки разности широт, блок реверса механизма отработки отшествия,вы.числитель приращений географических координат, блоки управления знаками приращений широты и долготы, накопители долготы и широты, задатчики начальной долготы и широты и устройство отображения текущих координат, причем первые входы масштабного узла и вычислителя приращений географических координат подключены к выходу накопителя широты, блоки реверса механизмов отработки разности широт и отшествия первыми входами подключены к соответствеННым выходам масштабного узла, а выходами подключены к автоматическому планшету, второй вход масштабного, узлэ подключен к задатчику масштаба и широты главной параллели, первые входы блоков управления знаками приращений широты и долготы подключены к соответственным выходам вычислителя приращений географических координат, а выходами подключены к первым входам соответствующих накопителей координат, вторые входы которых подключены, соответственно, к задатчикам начальной широты и долготы, а выходы подключены к устройству отображения текущих координат, о тличающийся тем, что, с целью повышения точности счисления географических координат, в него дополнительно введены блок задания точных географических координат, устройство коррекции составляющей пути по параллели, устройство коррекции сое-, тавляющёй пути по меридиану, суммирующее устройство канала широты и суммирующее устройство канала долготы, причем первый вход су2имирующего устройства канала долготы подключен к первому выходу автомата счисления составляющих пути по параллели и меридиану, второй вход его подключен к первому выходу устройства коррекции составляющей пути по параллели, а выход подключен ко второму входу вычислителя приращений географических координат и к третьему входу мас штабного, узла, второй выход устройства коррекции составляющей пути по параллели.подключен ко вторым входам блока реверса механизма отработки отшествия и блока управления- знаками приреицений долготы, а первый и второй входы подключены соответственно к первому входу и выходу накопителя долготы, третий вход подключен к пер вому выходу блока задания точных географических координат, при этом второй вfcdxoд автомата счисления подключен .к первому входу суммирующего устройства канала .широты, второй вхо которого подключен к первому вЬ1Ходу устройства коррекции составляющей пу ти по меридиану, а выход его подключен к третьему, входу вычислителя приращений географических координат и к четвертому входу масштабного узла, чвторой ВЫХОД устройства коррекци составляющей пути по меридиану подключен ко вторым входам блока реверса механизма отработки разности ши рот и. блока управления знаками прира щений широты,.а первый и второй входы подключены соответственно к перво му входу и выходу накопителя широты, третий, вход подключен ко второму выходу блока задания точных ге-. ографических координат. 2. Автопрокладчик по п. 1, о тл и ч а ю щ и и с я тем, что, устройства коррекции составляющих пути по параллели и меридиану включают в себя накопитель географической координаты, устройство сравнения, -первый и второй конъюнкторы и за.цатчик скорости коррекции, причем первый вход устройства коррекции составляющей пути подключен к первому входу первого конъюнктора, второй вход подключен к первому входу устройства сравнения, третий вход подключен к первому входу накопителя географической координаты, вторый выход устройства коррекции составляющей пути подключен к первому входу устройства сравнения, первый же выход устройст- . ва коррекции составляющей пути подключен .к выходу Еторого конъюнктора, при этом второй выход устройства сравнения пoдкJпoчё i к первому входу второго конъюнкторау а второй вход второго конъюнктора подключен к задатчику скорости коррекции, третий выход устройства сравнения подключен ко второму входу первого конъюнктора, выход же первого конъюнктора подключен ко второму входу накопителя географической координаты, а выход накопителя подключен ко .второму входу устройства сравнения. Источники информации, принятые вО внимание при экспертизе 1.Балашков И.В. Автосчислители и автопрокладчики. Л., Судостроение, 1968. Автопрокладчики АП-2, АП-3, АП-4 (аналоги). 2.Балашков И.В. Автосчислители и автопрокладчики. Л., Судостроение, 1968. Авто, про кладчик Путь-1 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Автосчислитель | 1979 |
|
SU836525A1 |
| Автопрокладчик | 1977 |
|
SU695331A1 |
| Проекционный путепрокладчик | 1960 |
|
SU142779A1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| АВТОМАТИЧЕСКИЙ ПРОКЛАДЧИК | 1968 |
|
SU231850A1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ШИРОТЫ МЕСТА СУДНА | 2010 |
|
RU2419767C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2660383C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |