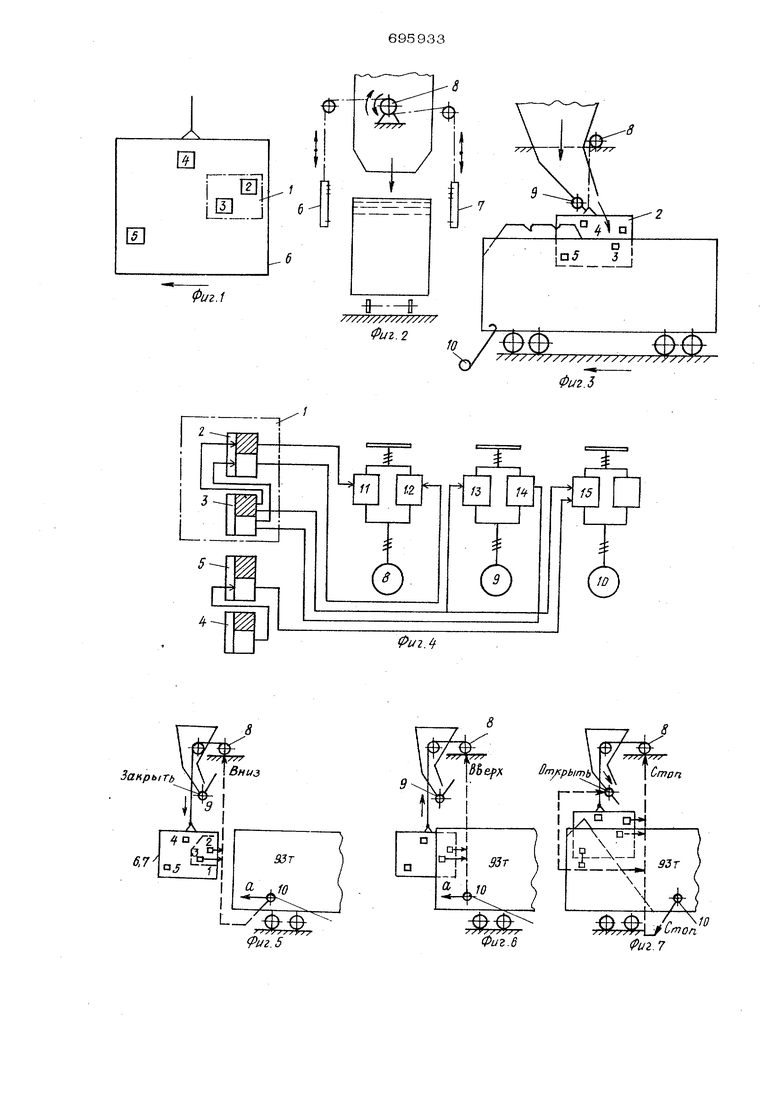
Изобре1ение относится к области погрузочньтх работ и может быть использовано при погрузке навалочных сыпучих грузов в полувагоны в угольной, горнорудной, коксохимической и других отраслях промышленности. Известно устройство для автоматического управпешя аогрузкой сыпучих грузов в полувагоны, содержащее набор датчиков, установленных точно в фиксированных положениях на неподвижных конструкЩ1ЯХ и предназначенных для определения высоты бортов каждого полувагона соот ветствующей грузоподъемности, для опред ления начала и конца загрузки полувагона, датчики, а также датчик,предназначенный для определения верхнего уровня загрузки полувагона и монтированный на неподвижной телескопической части погрузочного конвейера при загрузке полувагона с регулированием по весу, или на подвижной раме дозировочного желоба при загрузке полувагона по объему с самоподпором, и программные элементы, учитывающие конкретное расположение в каждом составе полуваго 1О& различной грузоподъемности l}. К числу недостатков, харе1ктеризуто1г1ик известное устройство для автоматического управлегшя погрузкой сыпучих грузов в nonyaarosibi, можно отнести: сложность аппаратуры автоматического управления погрузкой сыпучих материалов в полувагоны на дейстэ пощих погрузочных пунктах предприятий и необходимость полной остановки, без значительной реконструкШ1И на время монтажа и наладки 5 сложность согласования объема подаваемого груза загрузочным механизмом со- скоростью передвижения полувагхэна, находящегося под загрузкой (при загрузке по весу); важность комплектования составов однотипными вагонами по грузоподъемности и необходимость в иных случаях предварительного ввода программы загрузки при укомплектовании их разнотипными вагонами; сложность унификации аппаратуры автоматизации загрузки сыпучих материа3( пов в полувагоны; индивидуальность ра,зработки конструктивных узлов устройства при применении большого числа датчиков фиксированного контроля высоп : борта полувагона различной грузоподъемности (восемь типоразмеров), а также датчиков начала и конца погрузки полувагонов. Наиболее близким к изобретепию по технической сущности и достигаемому результату является устройство пля автома тического управления погрузкой сыпучих г;рузов в полувагоны, содержащее датчик Ейысоты борта полувагона, датчик начала п:огрузки, датчик высоты загрузки, разiviemeHHHft на подвижной в вертикальном нaпpaвлe ши раме, и блоки пуска nenepi HB |ых пр1гводов рамы и загрузочного меха11)зма и привода маневровотч.) Me: oifH3Ma Известное устройство им ear слол.укэ-|шге недостатки: для каждого от;-иг-акчце--ГОСЯ по высоте и ГруЗОПОДЬг МПС: : ; т лОлувагона должен устанаштипать::, ,, датчик высоты борта nonvBur-.ii-i на , специалт.ных конструк1щях в ггр.и--. сттроввпном по выаоте попоже1-й-:: - itonji t каждого oтл п aюшeгocя по г-- 1 тру- апподъемпости полувагона яия Ч -ЧПТуПЛНО itt со17 асования датчиков кЛ пг:: толуваг-опа с системой ,,i:-;iгn огруаки на подвижной рамс: ;(. : : рг;буогся установка конечн-х г ff-чс- iч л-:;; : установка датчиков высоте 5oi; г.:: i ;л-у-ватоноь, датчиков начала и KOiii, .-vrrrv;.,- ш на спехшальных KoncTpyicrjur: г --оч1ю фиксированных полойсз И,х, ( котгечных выключателей гтсчсппи-;--- .;;; гялы течки, требует иидивкпуа;г;-оГ; рпзрчоотки схем и кОнструктпьма.о; .i: ;,Ст-ройства; сложность унифккагаиг .-яш/. рь1 устройства при использ.;М111 1: .-О дпя автоматизации погрузки иолуг.-а-о;;л:3 различной высоты и rpy3onciUb;:;MHij.-:;T, что в конечном счете делает ucyjiyioiv i: j я Експлуатации устройство., Цель изобретения tTt-Dbiuie; ;o у.цобс:т и а эксплуатадш. Указанная цель достит аотся i::;:,), что датчики высоты борта иолуп гипа и чала погрузки размещень rsn iion. -/ ;; ;--; Б вертикальном направлоч -) рог-го, д.-гшик высоты борта полувагопа iibiicijinoi. л5 двух чувствительных злет.геиго :.. расцоло женных один выше дру1ог-о со u-MS:rui. нижнего чувствительного jjnMc.нг;л в горизонтг льной плоскости по опюшанигс к верхнему в направлении дгя-жеьня полувагона, и установпен перепз Пй 5адпим фро тг;м потока груза по направлению движения полувагона и ниже датчика высоты загрузки, который разметцен за задним фронтом потока груза, датчик начала погрузки расположен ниже датчиков высоты борта полувагона и высоты загруэки и со смещением относительно них в горизонтальной плоскости в напранотении движешш полувагона, причем единичные в лходы чувствительных элементов датчика высоты борта полувагона соединены по схеме И и подключены к одному из блоков пуска реверсивного привода рамы, нулевые выходы этих элементов соединены по схеме и подключены к другому блоку пуска реверсивного привода рамы, нулевой выход нижнего , чувствитель1ГОГО элемента датчика высоты борта полувагопа соединен с из блоков пуска роверсивного привода загрузочного механизма J а едгтничпый - с другим блоком iiyciia э.гого привода и о блоком пуска привода маневрового мехат-тзма, соединенным дополнитэльпо и со включенными по схеме ИЛИ-НП нулевыми выходами датчиков высоты загрузки и начала погрузки. На фиг 1 предложет1а схема расположения ,цатчиков на подвижной раме; на ({|иг 2 - схема подвески панелр подвижкой pajv-iM; па фиг, 3 - схема подвески рамтл и расположение MexaHi-T3NfOB устройства; па фиг, 4 .-- схема coeдинe шя выходов д;.1Т:пков со входшу1и блоков пуска приво/ioi ч4е%.а1шзма; sia фиг. 5-11 - схемы аатруоки полувагонов при разных положепиш : подвижной рамы с датчиками. Усаройство для автоматического управления погрузкой сыпучих грузов в полуваготп 1 содержит датчик 1 высоты борта полу вэгопа, выполненный в виде двух чувстйнтельпых верхнего и нижнегю элементов У. и 3, например фотоэлементов, чувствуггелъпый элемент 3 является одновременно и датчиком конда погрузки полувагона, датчик 4 высоты загрузки полувагогта, датчик 5 начала погрузки полувагона. Вес д.атчики {фиг. 2) расположены на ;одаи к1юй , состояшей из двух пане;гпй 6 и 7, приводимых в движение в верти кгяльной плоскости реверсивным привоrioiv; 8, который, в свою очередь, жестко укреплен, например, на течке загрузочного механизма 9, В устройство входят также манпвроБЫй .1схапизм 10 (фиг. 3) и блоки 11-15 (, -Л) пуска приводов всех порючисленьы::г ги.тше мехамиаглов. 569 Датчик 1 и датчик 4 распопожены по разные стороны от потока груза, причем последний расположен за задним фронтом потока груза по направлению движения по лувагона. Датчик 4 установлен выше сред ней точки, равно отстоящей от чувствитель ных элементов датчика 1 на расстоянии. равном заданной №1соте уровня загрузки полувагона над его бортами. Чувствительный элемент 2 датчика 1, установленного на подвижной раме 6 и 7, размещен выше элемента 3, который смещен относительно него по горизонтали в направлении движения полувагона (на фиг. 1 и фиг. 3 направление движения полувагона показано стрелкой). Элементы 2 и 3 размещены на минимальном расстоянии друг от друга, обес- речивающем их избирательное (раздельное) срабатывание от верхней кромки бор та полувагона и исключающим их воздействие друг на дру1-а. Расстояние между ними по горизонтали должно соответствовать начальному ра положению устья погрузочного механизма по отношению к торцовой стенке полувагона в момент начала его погрузки, а по вертикали при максимальном опускании подвижной рамы датчик 5 может достигать примерно до половины высоты борта полувагона наименьшей грузоподъемности. Единичные выходы, например . (нормально открытые контакты выходных реле чувствительных элементов 2 и 3 датчика 1 высоты борта полувагона (на фиг. 4 заштрихованы), соединены между собой по схеме И и подключены к блоку 11 пуска привода 8 рамы, обеспечивающему движение вниз, а их нулевые выходы (например, нормально закрытые контакты выходных реле) (на фиг. 4 не заштрихованы) соединены между собой по схеме НЕ-И и подключены к блоку 12 пуска, обеспечивающему движение рамы вверх. Кроме того, единичный выход чувствительного элемента 3 подключен к блоку 13 пуска пр1вода загрузочного механизма 9, задаюп ему команду закрыто и к блоку 15 пуска привода маневрового механизма Ю, формирующему команду вперед, а его нулевой выход - к блоку 14 пуска загрузочного механизма 9, задающему команду открыть. Нулевые выходы датчиков 4 и 5 (нормально закрытые контакты выходных реле) соединены между собой по схеме НЕ-И и подключены также к блоку пуска 36 15 прнвопа маневрового механизма 10. Пунктирными линиями со стрелками показаны связи датчика с соответствуюошми механизмами. Стрелками (сплошными) показаны направления передвижения механизма для полувагока в определенный момент погрузки (фиг. 5-11). Устройство для автоматического управления погрузкой сыпучих грузов в полувагоны работает следующим образом. Привод подвижной рамы осуществляет опускание (синхронное) ее панелей б и 7, при условии, когда оба чувствительных элемента 2 и 3 возбуждены, т. е. если оба эти элемента находятся в зоне междувагонного пространства или вообще не перекрыты в 1гонами. При этом маневровый механизм 10 включен на передвижение состава вперед под загрузку. Подъем паналей 6 и 7 подвижной рамы осуществляется, если оба элемента 2 и 3 перекрыты полувагоном, и они не возбуждены. Остановка привода 8 возникает в момент, когда при подъеме чувствительный элемент 2 выходит за уровень верхней кромки борта полувагона и возбуждается, а элемент 3 остается ниже кромки борта полувагона и затемнен. При этом открывается течка загрузочного мьханизма 9. При частичной загрузке сверх борта полувагона затемняется датчик 4 и включается в работу маневровый механизм 1О в старт-стопном режиме. При выходе чувствительного элемента 3 в зону междувагонного пространства включается загрузочный механиз 9 на закрытие и погрузка полувагона заканчивается. Однако протягивание состава продолжается, так как маневровый механизм 10 остается включенным. При затемнении датчика 5 следующим в составе полувагоном, установленным в этот момент под погрузку, происходит открытие загрузочного механизма. Пикл погрузки повторяется. На фиг. 5-11 в качестве примера показаны схемы погрузки полузагонов при разных положениях рамы-с датчиками и в зависимости от установки полувагона по отношению к заг- рузочному механизму, а также от степени его загрузки. При подаче локомотивом состава и его головного полувагона к загрузочному механизму (фиг. 5) все дат чики и их чувствительные элементы 1, 2, 3, 4 возбуждены, панели подвижной рамы опущены в нижнее положение. При подаче оператором погрузки команды погрузка в автоматическоь режиме включается маневрОЕЫЙ механизм 10 и состав про- 7 тягивается- (фиг, 5,стрелка а) При аа-гем Heinffl чувствительных эпементов 2 н 3 датчика 1 полувагоном (фиг. 6) включается привод 8, рама начинает подиимать ся до момента, когда чувствительный эле- мент 2 датчика 1 окажется выше борта полувагона (фиг. 7), тогда привод от.ключаэтся и подвижная рама останавливае1Х2я Ьысота борта полувагона определенно Полувагон продолжает продвигаться (по стрелке а) до момента, когда окажет1зя затемненным датчик 5, При этом отключается маневровый механизм 10, состав останавливается, загрузочный механи. 9 устанавливается в начале погрузки полувагона и его течка открывается. Начина еГ::а о:руэка полувагона. При затамгсе™ nvK датчика 4 первым корпусом aarpj-жае r/fo,-o ;-11г.-г}риала (фиг, 8) включается ме Y.9,i iTai;t .10 и состав проталкивается (по Г;:-iOjfLsf; i) ДО момента, когда опять воз™ ; 6-у.и1гг:;я датчик 4 При эгом мехагтзм 10 Огключо.ется и состав останавливается, i 1огру3 1а продолжается до следующего аа );:: л ич;;н датчика 4„ Маневровый леха:; 3-.-; J О работает в старт-стоп то ; pejKM-л;г (fp , 9) до момента, когда чувстет ;::, зломонт 3 (фиг 1О) чдйтигТ в кснае 1 слузаго11а в междуваг-онтюе прос-р-Oi-ГСл :, Пмн этом аакрываэтся тс/р;/) ;:;зг руяочлогО мехониама 9, после чего BjtHEO чактск глеханизм 10 и протягивав состав 13 .увагонном пространстве течка заг; рузоч1го1 О механизКШ закрыта, Од ювреме но включается привод 8,на отпусканнз ггодвижной рамы с датчикам:и, 3 полоясеНИИ (фиг. 11) отражено начсшо новч-о рени ujuoia загрузки полувагона, например, .мен ший грузоподъемности в 62 т„ и показано |-:ояожение, когда огфеделена высо-га борт гкового полупагюна и начата загрузка его Г йр вого конус а, 1 спольэование усфойсГ1 я иочволит ,;ократн1Ъ число датчиков высочът борта ir nycaroHOB до одного за счг-г :утг1 ановш1 7ТО на подвижной раме; гш &илгть иа геж;;ость определения высоты борто. tionj-Baro m за счет размещения чуссч вктельных ЭЛ8МОНТОВ датчика выссты бор7а иолувагонов; повысить надежност). работы датчиков, а соответственко и всего устройства за счет вынесения датчиков из зоны iiOTOKa груза; упростить схему устройстэл упраачения, 9338 Формула изобретения Устройство для автомат51ч ескотчз управления погрузкой сыпучих грузов в полувагоны, содержащее датчик высоты борта полувагона, датчик начала погрузки, датчик BbicoTiii загрузки, размещенный нй подвижной в вертикальном направлении раме, и блоки нуска реверсивных приводов рамы загрузочного меха1шзма и привода маневрового механизма, о т л и ч а юта.е е с я тем, что, с целью повьпиения удобства эксплуатации, датчики высоты борта полувагона и начааа погрузки размещены на подвижной в вертикальном напраглении раме, датчик высоты борта полувагона выполнен из двух чувствительных элементов, расположенных один другого со сме1шшгем нижнего чувствительного элемента в горизонтальной плоскости по отношению к верхв:ему в направлении движешш полувагона, и установлен перед передним фронтом потока груза по направлению полувагона и датчика высоты загрузки, который ра;зме11(ен за задним фронтом потока груза, датчик начала погручзки расположен ниже датчиков высоты борта нолувагона и В5з1соты загрузки и со относительно них в горизонтальной плоскости в направлении движения полувагона, причем единичные выхс ды чувствительных элементов датчика высоты борта полувагона соединены по схеме И и подключены к одному из блоков пуска реверсивного привода рамы, нулевые выходы, этих элементов соединены по схеме И ЛИ-НЕ и подключены к блоку пуска реверсивного п)эивода рамы, нулевой выход нижнего чувствительного элемента датчика высоты, борта полувагона соединен с одшш из блоков пуска реверсивного привода загрузочного механизма, а едиHH4iibjfi - с другим блоком пуска этого привода и с пуска привода маневpojooro механизма, соединенным допопнитеньно и со включенными по схеме ИЛИН.Е 11улешэ1ми выходами -датчиков высоты аагрузки и начала погрузки, ИсточшПш информации, принятые во внимание при экспертизе 1- Мелькумов Л Г., Автоматизация технологических процессов 5тольных шахт, М., Недра, 1973, с„ 127. 2., РЬденко А. В н др Меха П1запия и авгоматиза1шя ногрузки угля в железнодорожные вагоны, М,, Недра. 1974, с 56-58, 6O-G4, 99-103.
U i
UrdL.J
Фиг.1
////x/x/// ////// Фиг. 2

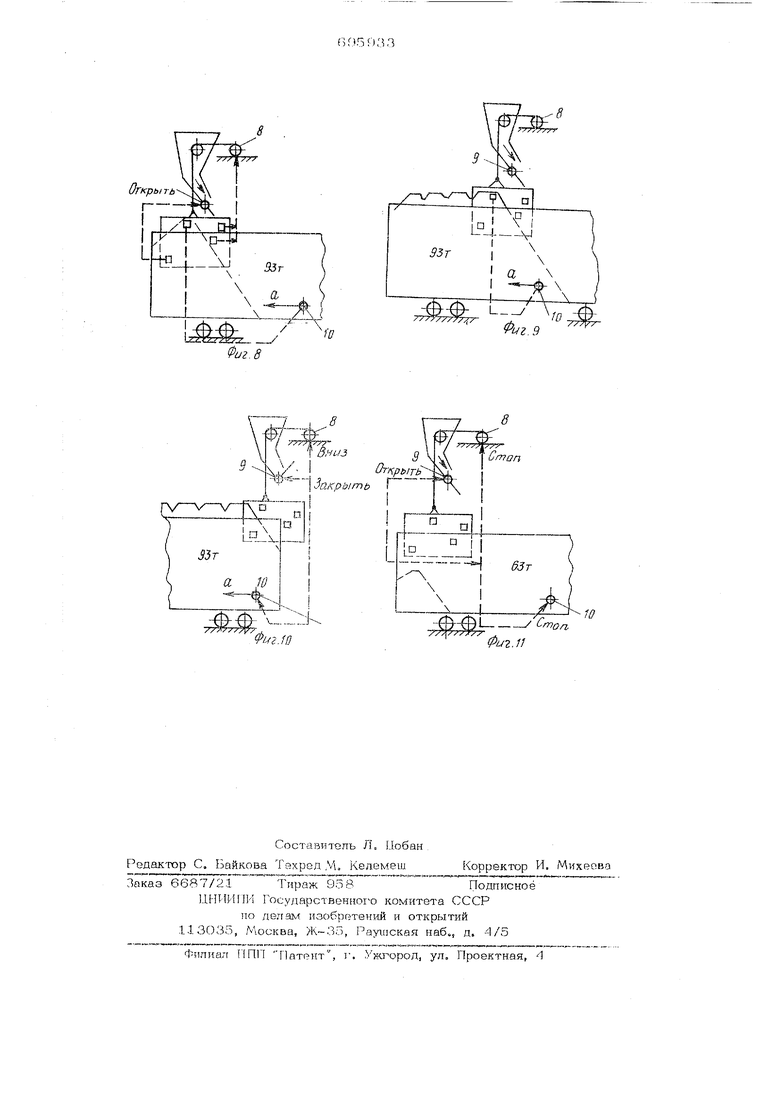
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозированной погрузки сыпучих материалов в железнодорожные полувагоны | 1981 |
|
SU1006350A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО СЫПУЧИХ ГРУЗОВ ИЗ БУНКЕРНОЙ УСТАНОВКИ | 2020 |
|
RU2742620C1 |
| Способ мониторинга воздействия нагрузок на вагон в процессе его эксплуатации | 2021 |
|
RU2760245C1 |
| Устройство для беспылевой погрузки сыпучих материалов в транспортные средства | 1989 |
|
SU1745652A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство для погрузки кокса из бункера в полувагоны | 1958 |
|
SU115084A1 |
| Устройство для погрузки сыпучих грузов в железнодорожные полувагоны | 1980 |
|
SU1011473A1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Устройство для разравнивания и уплотнения поверхности сыпучего груза | 1976 |
|
SU593994A2 |
| Устройство для загрузки железнодорожных полувагонов сыпучим материалом | 1978 |
|
SU765162A1 |
Ь
flj
.
Закрьгть
9иг.5
y
T
U77;
W/Z
IKт П-.
Гф -J I
tl iT ч , I 9Ъг
-- --
i
; Фиг.6
Ч-. ./л //7
Pu2.7
ХМ
Iz
г. 9
фиг. 11
