(54)АВТОРУЛЕВОЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| Стабилизатор "нева" курса речных судов | 1976 |
|
SU615456A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1983 |
|
SU1183944A2 |
| Авторулевой | 1975 |
|
SU540258A1 |
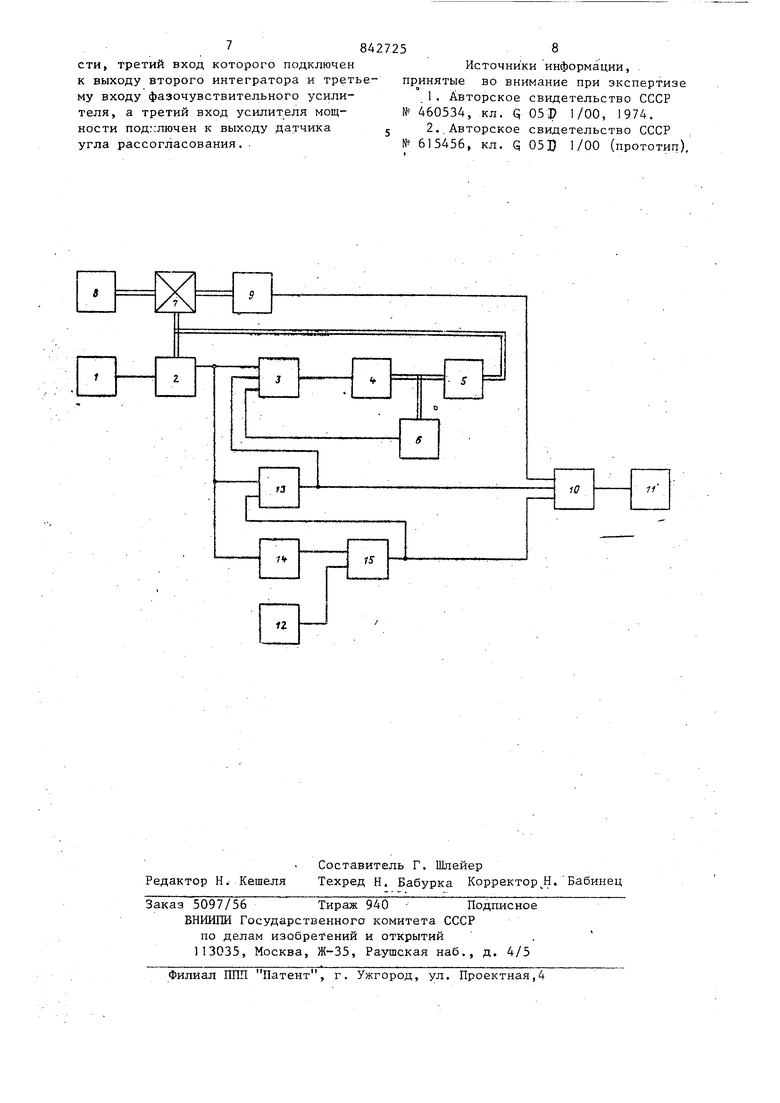
Изобретение относится к судовой автоматике и может быть использован для автоматизации управления курсом судов и в аналоговых системах управ ления движением. , Известны авторулевые, предназнач ные для маневрирования и стабилизации судов на желаемом курсе. Для этого в указанных авторулевых вырабатывается управляющий сигнал, представляющий собой сумму сигналов отклонения истинного курса от- желаемог скорости изменения курса и величины угла перекладки руля, и приводящий к перемещению руля в сторону уме«ьше ния величины отклонения истинного курса от желаемого. Так как измерение истинного курса входящего в управляющий сигнал, при многократных циркуляциях судна затруднитеяьно реализовать в ограниченном линейном диапазоне аналоговых устройств, то обычно формируется непосредственно сигнал отклонения i cтинного курса от желаемого с помощью индукционных машин приемника и задатчика курса, включенных по дифферен- циальной схеме, не позволяющей выделить сигнал истинного курса. Поэтому скорость изменения курса в сигнале управления, получают дифференцированием величины отклонения истинного курса от желаемого ClJ. Непосредственное использование сигнала скорости изменения угла: курсав суммарном управляющем сигнале приводит к излишним срабатьгеаниям рулевого привода, реагирующего в этом случае на незначительные колебания курсового угла, вибрацию корпуса судна высокочастотные случайные ветроволновые возмущения и другого рода помехи. Наиболее близким по технической сущности к предлагаемому, является авторулевой, который предусматривает . получение сигнала скорости изменения курса с тахогенератора двигателя следящего привода индукционной машищ приемника курса. Известный авторулевой содержит сельсин-датчик, связанный с сельсином-приёмником, фазочувствительный усилитель, двигатель, снабженный редуктором и имеющий тахо генератор, электрически связанный с усилителем мощности рулевого привода Г21. Однако тахометрический скоростной сигнал имеет низкую точность при малых значениях скорости, соответствующих режиму стабилизации судна на желаемом курсе, и содержит погрешности отработки угла электромеханическим следящим приводом. Цель изобретения - повышение точности и помехозащвденности авторулевого. Эта цель достигается тем, -что в авторулевой, содержащий последовател но включенные усилитель мощности и рулевой привод с датчиком угла перекладки руля и последовательно включе ные вращающиеся трансформаторы - дат чик и приемник курса, фазочувствительный усилитель и двигатель, на валу которого установлены тахогенера тор, выходом подключенный ко второму входу фазочувствительного усилителя и редуктор, механически подсоединенный к приемнику курса и к дифференциалу, киг ематически соединенному с задатчиком курса и датчиком угла рас согласования, введены два интегратор входами подключенные к выходу приемника курса, и блок вычитания, входы которого подключены к выходу датчика угла перекладки руля и выходу первог интегратора, а выход - ко второму входу второго интегратора и ко второ му входу ;усш1ителя мощности, третий вход которЬго подключен к выходу второго интегратора и третьему входу фазочувствительного усилителя, а третий вход усилителя мощности подключен к выходу датчика угла рассогласования . На чертеже изображена блок-схема авторулевого.: Авторулевой состоит из вращающегося трансформатора 1 - датчика угла курса, вращающегося трансформатора 2 - приемника, фазочувствитель ного усилителя 3, двигателя, 4, связанного с ротором вращающегося транс форматора 2 через редуктор 5 и с тахогенератором б непосредственно. дифференциала 7, задатчик 8 курса, датчик 9 угла рассогласования, усилитель 10 мощности, подключенный к рулевому приводу 1 с датчиком I2 угла перекладки руля,«интеграторы 13 и 14 и блок 15 вычитания. Авторулевой работает следующим образом. Вращающийся трансформатор 1 - датчик текущего угла курса судна-имеет четырехпроводную синхронную связь с вращающимся трансформатором(ВТ)2 приемником курса, вследствие чего на его роторной обмотке возникает сигнал разности углов развороти осей роторов вращающихся трансформаторов 1 и 2.. Этот разностный сигнал является сигналом ошибки для электромеханического следящего контура, состоящего из фазочувствительного усилителя 3, двигателя 4 с редуктором 5, через который угол разворота оси ротора JBT 2 приводится в соответствие с углом поворота ВТ 1 . При этом сигнал скорости вращения двигателя 4, получаемый с тахогенератора 6, поступает в фазочувствйтельный усилитель 3, компенсируя его входной сигнал, благодаря чему скорость двигателя 4 при отработке сигнала ошибки в начальный момент пропорциональна величине входного сигнала. Одновременно с вращением оси ротора РВ 2 производится разворот одной из шестерен дифференциала 7. Для задания желаемого угла курса судоводитель с помощью задатчика 8 курса разворачивает на соответствующий угол другую шестерню дифференциала 7. Разностный угол разворота шестерен дифференциала 7 преобразуется в датчике 9 рассогласования в пропорциональный электрический сигнал отклонения истинного курса судна от желаемого, который поступает в усилитель 10 мощности рулевого привода 11. Кроме описанного выше электромеханического следящего контура, авторулевой снабжен двумя дополнительными следящими контурами. Первый из них образован замкнутой цепью из элементов ВТ 2, интегратора 13, фазочувст-, вительного усилителя 3 и двигателя 4 с тахогенератором 6 и редуктором 5. В этом контуре выходной сигнал интегратора 13 одновременно является входным сигналом фазочувствительного усилителя 3, пропорциональным текущей
58А27256
скорости вращения электродвигателя 4, величине управляющего воздействия и обеспечивающего слежение за истинным углом курса судна. Поэтому выходной сигнал интегратора 13 представляет собой оценку скорости .изменения текущ го курса, высокочастотные составляющи которой, т.е. помеха, фильтруются за счет постоянных времени-следящего контура, включающих в себя постоянную времени интегратора 13 и постоянную времени замкнутой цепи из фазочувстви тельного усилителя 3, двигателя 4 и тахогенератора 6, образующей электромеханический интегратор. Причем на точность полученной-оценки скорости не влияет .скорость задания желаемого курса, как это имело бй место в случае дифференцирования сигнала рассогласовавия по курсу, а неравномерность вращения двигателя следящего привода ВТ - приемника курса - оказывается сглаженной. Второй дополнительный следящий контур представляет собой замкнутуцепь из ВТ 2, интегратора 14, блока 15 вычитания, интегратора 13, фазочу ствительного усилителя 3 и двигателя 4 с тахогенератором 6 и редуктором 5 Выходной сигнал интегратора 14, входящего в этот контур, пропорциона лен скорости изменения выходного сигнала интегратора 13, т.е. является оценкой ускорения изменения текущего курса судна, отфильтрованной от помех постоянными времени указанного вы ше электромеханического интегратора и интеграторов 13 и 14. Сигналы скорости и ускорения изменения текущего курса, получаемые с ин теграторов 13 и 14, а также сигнал по рассогласованию между текущими и заданным курсом судна с датчика 9. суммируются в усилителе 10 мощности, образуя управляющий сигнал на рулевой привод 11. I Однако указанные выше постоянные времени следящих контуров, обеспечивая помехозащищенность авторул;евого, вносят запаздывание в управляющий сиг нал, что может приводить к снижению устойчивости процесса стабилизации судна на желаемом курсе. Для сохранения устойчивости в блок 15 вычитания вводится форсирующий сигнал угла перекладки руля с датчика 12, устраняющий запаздьшание управляющего сигнала. Это обусловлено тем, что угол перекладки руля, соответствующий
поэтому пропорциональный действйтель(Ному ускорению изменения курса судна, |корректирует значения оценок второй и первой производных курсов, поступающих с интеграторов 13 и 14 в усилитель 10 мощности для формирования управляющего сигнала.(Для исключения ошибок при наличии инфранизкочастотных внешних возмущений в блоке 15 вычитания вырабатывается сигнал текуще го угла перекладки руля минус балансировочное значение угла перекладки руля). . По суммй рному управляющему сигналу разворачивается руль для приведения на заданный курс и удержания на нем судна в течение времени стабилизации. Как показьшают расчеты и математическое моделирование, предлагаемый авторулевой позволяет избежать излишних срабатьшаний рулевого привода, сократив их общее число в 1,3-2 раза, а при интенсивных ветроволновых возмущениях - в 2-3 раза, что способствует продлению его моторесурса и повышению надежности всей системы управления , Формула изобретения Авторулевой, содержащий последогвательно включенные усилитель мощ ности и рулевой привод с датчиком угла перекладки руля и последовательно включенные вращающиеся трансформаторыдатчик и приемник курса, фазочувствительный усилитель и двигатель, на валу которого установлены тахогенераТор, выходом подключенный ко второму входу фазочувствитёльного усилителя, и редуктор, механически подсоединенный к приемнику курса и к дифферент циалу, кинематически соединенному с задатчиком курса и датчиком угла рассогласования, отличающийся тем, что, с целью повьшеия .точности и помехозащищенности авторулевого, в него введены два интегратора, входами подключенные к выходу приемника курса, и блок вычитания, входы которого подключены к выходу датчика-угла перекладки руля и выходу первого интегратора, а выход КО второму входу второго интегратора и ко второму входу усилителя мощно7842725сти, третий вход которого подключен к выходу второго интегратора и третьему входу фазочувствительного усилителя, а третий вход усилителя мощности под :лючен к выходу датчика i 5 угла рассогласования. пр № № Источники информации, . инятые во внимание при экспертизе I. Авторское свидетельство СССР 460534, кл. Q 05 1/00, 1974. 2., Авторское свидетельство СССР , 615456, кл. Q 05) 1/00 (прототиц),
