(54) ЦИФРОВОЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой регулятор напряжения | 1973 |
|
SU484497A1 |
| Цифровой регулятор напряжения | 1975 |
|
SU540261A1 |
| Цифровое устройство для управления инвертором с квазисинусоидальным напряжением | 1983 |
|
SU1089756A1 |
| Многодвигательный электропривод | 1985 |
|
SU1300623A1 |
| Устройство для программного управления шаговым двигателем | 1988 |
|
SU1596308A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Цифровой регулятор частоты вращения | 1988 |
|
SU1552148A1 |
| Устройство для управления вентильным двигателем циклоконверторного типа (его варианты) | 1983 |
|
SU1137562A1 |
| Цифровое устройство для управления вентильным преобразователем | 1978 |
|
SU748783A1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
Изобретение относится к системам автоматического регулирования и может быть использовано для точной стабилизации тока нагрузки.
Известны цифровые регуляторы, построенные по принципу синхронной или асинхронной системы импульсно.фазового управления .
Недостатком этих регуляторов является низкая точность регулирования о
Наиболее близким по технической сущности к данному является цифровой регулятор, содержащий последовательно соединенные нуль-орган, распределитель импульсов и вентильный преобразователь, выход которого через датчик напряжения, инвертор и преобразователь напряжение - частота соединен со входом счетчика импульсов, выход которого подключен к распределителю импульсов, блок задания регулируемых параметров и последовательно соединенные преобразователь ток-интервал времени, пороговый блок, преобразователь код-интервал времени и третий блок перезаписи кода 3 .
Недостатком этого регулятора также является ограниченная точность его работы.
Целью изобретения является повышение точности работы цифрового регулятора ,
Это достигается тем, что устройство дополнительно содержит реверсивный счетчик, одни входы которого через второй блок перезаписи соединены с выходом блока задания регулируемых Ьараметров, выходы через .первый блок перезаписи - с другими входами счетчика импульсов, а другой
5 вход - с выходом порогового блока, выход блока задания регулируемых параметров подключен ко входу третьего блока перезаписи кода, а выход датчика напряжения через нагрузку соеди0нен со входом преобразователя токинтервал времени.
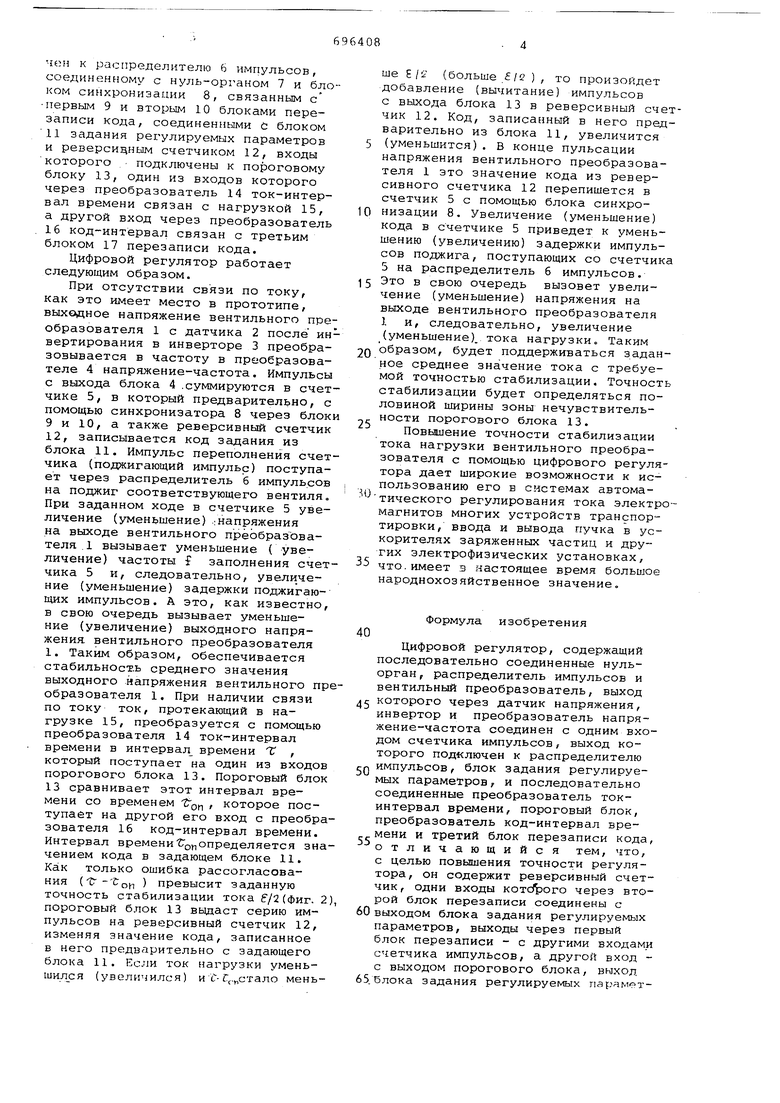
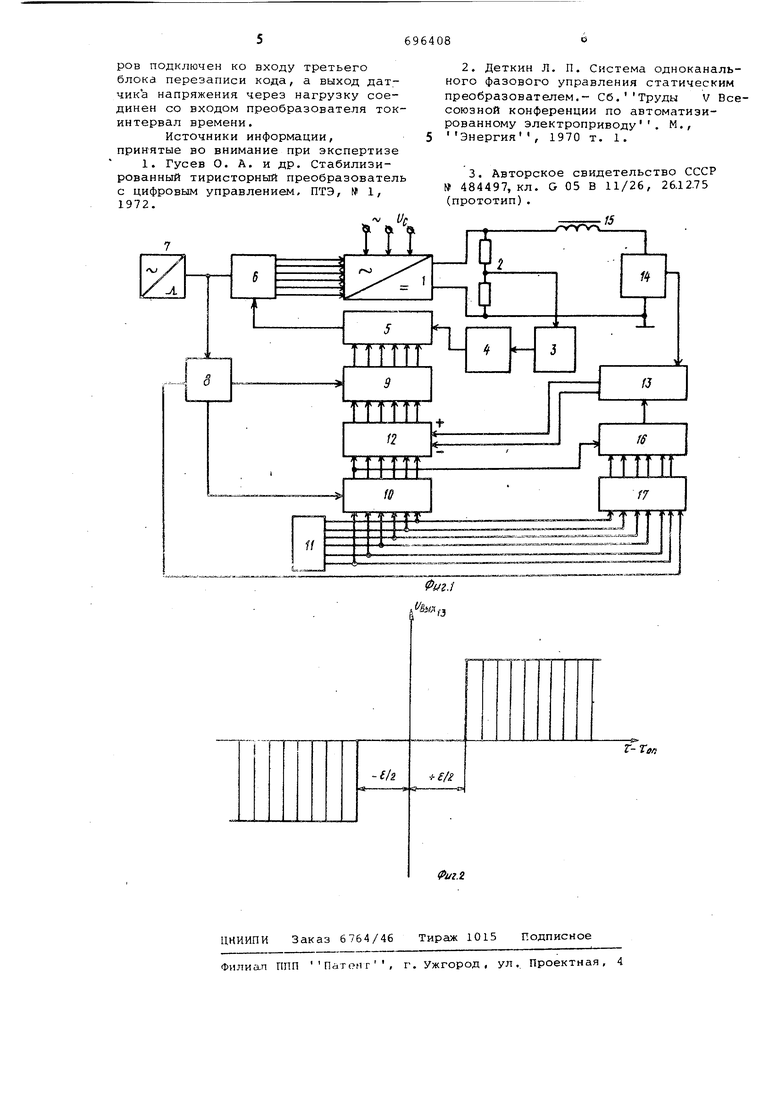
Блок-схема цифрового регулятора представлена на фиг. 1; на фиг. 2 характеристика порогового блока.
5
Цифровой регулятор содержит вентильный преобразователь 1, датчик 2 напряжения, выход которого через последовательно соединенные инвертор 3, преобразователь 4 напря0жение - частота и счетчик - гктлклюей к распределителю 6 импульсов, оединенному с нуль-органом 7 и блоом синхронизации 8, связанным с ервым 9 и вторым 10 блоками переаписи кода, соединенными с блоком 1 задания регулируемых параметров реверсивным счетчиком 12, входы оторого подключены к пороговому локу 13, один из входов которого ерез преобразователь 14 ток-интерал времени связан с нагрузкой 15, а другой вход через преобразователь 16 код-интервал связан с третьим блоком 17 перезаписи кода.
Цифровой регулятор работает следующим образом.
При отсутствии связи по току, как это имеет место в прототипе, выходное напряжение вентильного преобразователя 1 с датчика 2 после инвертирования в инверторе 3 преобразовывается в частоту в преобразователе 4 напряжение-частота. Импульсы с выхода блока 4 .суммируются в счетчике 5, в который предварительно, с помощью синхронизатора 8 через блоки 9 и 10, а также реверсивный счетчик 12, записывается код задания из блока 11. Импульс переполнения счетчика (поджигающий импульс) поступает через распределитель 6 импульсов на поджиг соответствующего вентиля. При заданном ходе в счетчике 5 увеличение (уменьшение) :напряжения на выходе вентильного преобразователя 1 вызывает уменьшение (увеличение) частоты f заполнения счетчика 5 и, следовательно, увели чение (уменьшение) задержки поджигающих импульсов. А это, как известно, в свою очередь вызывает уменьшение (увеличение) выходного напряжения вентильного преобразователя 1. Таким образом, обеспечивается стабильности среднего значения выходного напряжения вентильного преобразователя 1. При наличии связи по току ток, протекающий в нагрузке 15, преобразуется с помощью преобразователя 14 ток-интервал времени в интервал времени Т , который поступает на один из входов порогового блока 13. Пороговый блок 13 сравнивает этот интервал времени со временем , которое поступает на другой его вход с преобразователя 16 код-интервал времени. Интервал времени tr определяете я значением кода в задающем блоке 11. Как только ошибка рассогласования ( ) превысит заданную точность стабилизации тока f/a (фиг. 2), пороговый блок 13 выдаст серию импульсов на реверсивный счетчик 12, изменяя значение кода, записанное в него предварительно с задающего блока 11. Если ток нагрузки уменьшился (увеличился) иС-Г,„стало меньше Е/2 (больше /2 ), то произойдет добавление (вычитание) импульсов с выхода блока 13 в реверсивный счетчик 12. Код, записанный в него предварительно из блока 11, увеличится (уменьшится). В конце пульсации напряжения вентильного преобразователя 1 это значение кода из реверсивного счетчика 12 перепишется в счетчик 5 с помощью блока синхронизации 8. Увеличение (уменьшение) кода в счетчике 5 приведет к уменьшению (увеличению) задержки импульсов поджига, поступающих со счетчика 5 на распределитель 6 импульсов. 5 Это в свою очередь вызовет увеличение (уменьшение) напряжения на выходе вентильного преобразователя . и, следовательно, увеличение (уменьшение), тока нагрузки. Таким 0 образом, будет поддерживаться заданное среднее значение тока с требуемой точностью стабилизации. Точность стабилизации будет определяться половиной ширины зоны нечувствительности порогового блока 13.
Повышение точности стабилизации тока нагрузки вентильного преобразователя с помощью цифрового регулятора дает широкие возможности к использованию его в системах автома- - тического регулирования тока электромагнитов многих устройств транспортировки, ввода и вывода пучка в ускорителях заряженных частиц и других электрофизических установках, 5 что. имеет в настоящее время бoльuJOe народнохозяйственное значение.
Формула изобретения
Цифровой регулятор, содержащий последовательно соединенные нульорган , распределитель импульсов и вентильный преобразователь, выход 5 которого через датчик напряжения, инвертор и преобразователь напряжение-частота соединен с одним входом счетчика импульсов, выход которого подключен к распределителю Q импульсов, блок задания регулируемых параметров, и последовательно соединенные преобразователь токинтервал времени, пороговый блок, преобразователь код-интервал времени и третий блок перезаписи кода, отличающийся тем, что, с целью повышения точности регулятора, он содержит реверсивный счетчик. Одни входы котсфого через второй блок перезаписи соединены с
0 выходом блока задания регулируемых параметров, выходы через первый блок перезаписи - с другими входами счетчика импульсов, а другой вход с выходом порогового блока, выход
Фш.1
Лм,гЗ
