1
Изобретение предназначено для использования его в системах автоматики, преимущественно в машиностроении, радиотехнике, электропромьпштенности и т. п.
В современных системах автоматического и полуавтоматического управления наиболее актуальными и важными задачами являются обеспечение требуемой динамической точности и устойчивости в условиях действия большого уровня помех.
Известны устройства, выполняющие динамическую коррекцию сигнала управления в классе нелинейных и самонастраивающихся систем 1 2.
Эти устройства обладают недостаточной помехозащищенностью и существенно ухудшают устойчивость системы управления из-за больших фазовых сдвигов скорректированного сигнала.
Наиболее близким по технической сущности является устройство для дина-гмической коррекции, содержащее последовательно соединенные первое и второе инерциот1ые звенья, выход второго инерционного звена подключен ко входу второго инерционного звена, соединенного своим выходом непосредственно и через первый блок дифференцирования со входами первого сумматора .
Однако, это устройство в ряде случаев не позволяет обеспечить необходимые точность, помехозащищенность и устойчивость систем управления. Ввиду дискретного принципа работы сигнал на его выходе имеет нелинейную форму в виде ломаной кривой, что приводит к дополнительным фазовым сдвигам при дифференцировании такого сигнала звеньями системы управления.
Цель предлагаемого изобретения увеличение точности, устойчивости и помехозащищенности систем управления в широком диапазоне условий применений.
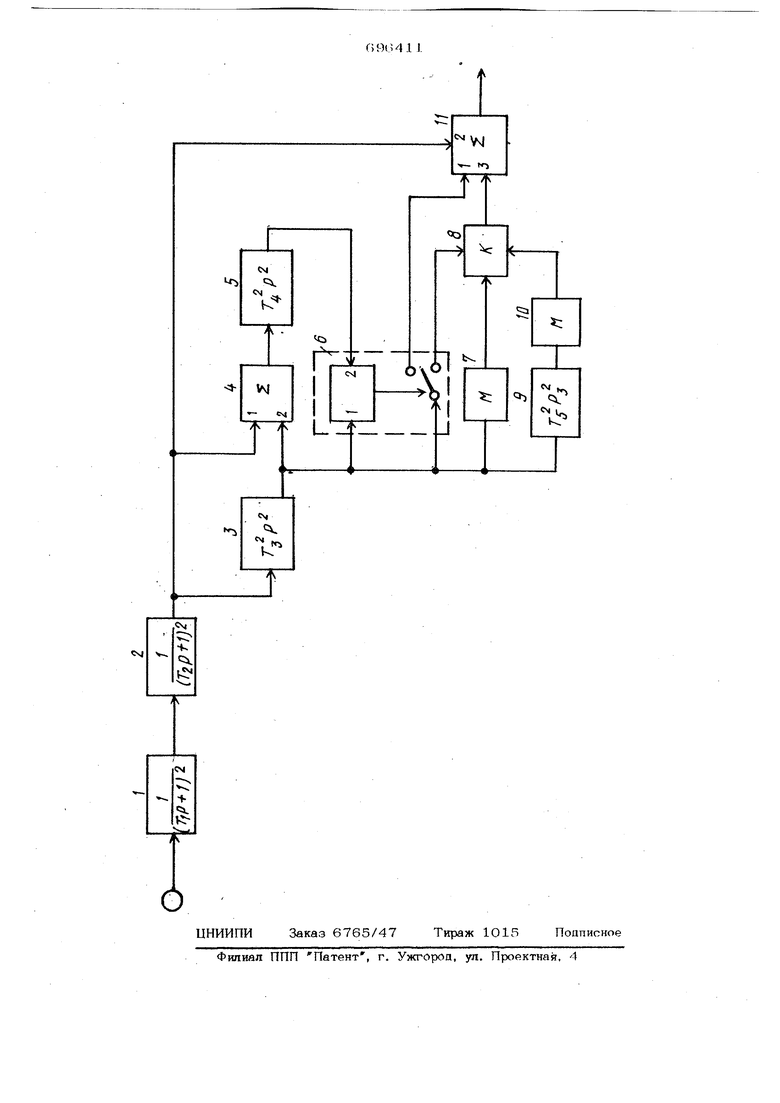
Для этого в устройство введены два блока выделения модуля, второй и третий блоки дифференцирования, второй сумматор, блок перестройки коэффициента усиления и релейный элемент, первый и 36 второй входы которого соединены с выходом первого блока дифференцирования, третий вход через второй блок дифференцирования соединен с выходом первого сумматора, первый )выход - с первым входом блока перестройки коэффициента усиления, а второй, выход - с первым входом второго сумматора, второй вход. которого подключен к выходу второго , инерционного звена, третий вход - к выходу блока перестройки коэффициента уси ления, второй и третий входы которого соответственно через первый блок выделения модуля и через последовательно соединенные второй блок выделения мопупя и третий блок дифференцирования подключены к выходу первого блока дифференцирования. На чертеже представлена блок-схема предлагаемого устройства. Устройство для коррекции сигналов управления содержит первое инерционное звено 1, второе инерционное звено 2, первый блок 3 дифференцирования, первый сумматор 4, второй блок 5 дифференцирования, релейный элемент б, срабатыва щий в зависимости от полярности входных сигналов, первый блок 7 выделения модуля, блок 8 перестройки коэффициента усиления, третий блок 9 дифференцирования, второй блок ,10 выделения моду ля и второй сумматор 11. При этом сигналы на выходе второго и третьего блоков 5 и 9 дифференцирова ния пропорциональны четной производной входных сигналов. Вход устройства через два инерционных звена 1 и 2 с передаточными функциями типа -/-... т-tz. последовательно соединенные меноду собой. подключен к первому входу первого сумматора 4 непосредственно, а ко второму входу сумматора 4 - через первый блок 3 дифференцирования, вырабатывающий четную производную входного сигнала. Выход первого блока 3 дифференцирования соединен с первым и вторым входами релейного элемента 6, а третий вход релейного элемента 6 соединен с в ходом второго блока 5 дифференцирования. Вход второго блока 5 дифференцирования оЬединен с выходом первого сум матора 4. Кроме того, релейный элемент 6 подключен к первому входу второго суммато ра 11 непосредственно, а к третьему ег входу через блок 8 регулировки усиления изменяющий коэффициент усиления пропор ционально отношению сигналов в выходах 114 первого и второго блоков 7 и 10 (чыдоления модуля. При этом вход первого блока 7 выделения модуля соединен с выходом первого блока 3 дифференцирования, а вход второго блока 10 выделения модуля соединен с выходом третьего блока 9 дифференцирования. При этом первый вход второго сумматора 11 соединен с выходом последовательно соединенных инерционных звеньев 1 и 2. Выход второго сумматора 11 является выходом схемы. Предлагаемое устройство работает следующим образом. На вход устройства подается сигнал управления, содержащий полезную составляющую и вредную-сигнал помехи. Частота сигнала помехи выше частоты полезного сигнала и частоты среза, на которую настроено данное устройство. Эти сигналы корректируются инерционными звеньями 1 и 2 и подаются на первый блок 3 дифференцирования и на первый . вход первого сумматора 4. Втррой вход звена соединен с выходом первого блока 3 дифференцирования. Одновременно сигнал с выхода первого блока 3 дифференцирования через релейный элемент 6 подается на второй вход второго сумматора 11. Процесс ослабления сигнала помехи ссушествляе гся за счет использования первого блока 3 дифференцирования второго порядка, у которого выходной сигнал всегда находится в противофазе по сравнению с выходным сигналом инерционного звена 2, а амплитуда увеличивается с увеличением частоты входного сигнала. Для полного подавления помехи необходимо, чтобы амплитуда на выходе блока 3 дифференцирования второго порядка 3 была равна амплитуде на выходе инерционного звена 2, тогда сумма этих сигналов на выходе второго сумматора 11 будет равна нулю. Однако, при постоянном коэффициенте усиления блока перестройки коэффициента усиления процесс полного подавления помехи будет происходить только на одной частоте, равной частоте среза. Для подавления помехи, частота которой больше частоты среза, необходимо изменять амплитуду сигнала с выхода блока 3 дифферендировакия обратно пропорционально ее увеличению. Эту функцию выполняет блок 8 перестройки коэффициента усиления, который сигналом
jTopiioTc; блоки 7 выд.лопия модуля, второго блока 1О выделения модуля и третьего блока дифференцирования определяет во сколько раз увеличилась амплитуда сигнала на выходе первого блока 3 дифференцирования, а затем во столько же раз уменьшает амплитуду. Таким образом, помеха отфильтровывается до нуля на всех частотах, больших частоты среза.
Электронное реле 6, второй блок 5 дифференцирования и первый сумматор 4 необходимы для определения значения частоты сигнала управления. При значении частоты сигнала управления меньше частоты среза релейный элемент 6 подключает сигнал с выхода первого блока 3 дифференцирования непосредственно ко входу второго сумматора 11, а при значении частоты, большей значения частоты среза, выход первого блока 3 дифферецирования подключается ко входу второго сумматора 11 черев блок 8 перестройки коэффициента усиления. Это обеспечивает полную фильтрацию помехи и не искажает полезного сигнала, частота которого меньше частоты среза.
Предлагаемое устройство по сравнению с известными увеличивает точность, помехозащищенность и устойчивость систем стабилизации летательных аппаратов
Формула изобретения
Корректируюшее устройство, содержащее последовательно соединенные первое . и второе инерционные звенья, выход второго инерционного звена непосредственно
и через первый блок дифференцирования соединен со входами первого сумматора, отличающееся тем, что, с целью повышения точности устройства, оно
содержит два блока выделения модуля, второй и третий блоки дифференцирования второй сумматор, блок перестройки коэффициента усиления и релейный элемент, первый и второй входы которого, соединены с выходом первого блока дифференцирования, третий вход через второй блок дифференцирования соединен с выходом первого сумматора, первый выход - с первым входом блока перестройки коэффициен
та усиления, а второй выход - с первым входом второго сумматора, второй вход которого подключен к выходу второго инерционного звена, третий вход ,- к выходу блока перестройки коэффициента усиления, второй и третий входы которого соответственно через первый блок выделения модуля и через последовательно . соединенные второй блок выделения модуля и третий блок дифференцирования подключены к выходу первого блока дифференцироВ:ания.
Источники информации, принятые во внимание при экспертизе .1. Авторское свидетельство СССР № 237319, кл. Q 05 В 13/02, 1970.
2.Островский Г. М. Применение нелинейных устройств в системах автоматического регулирования третьего поряд-
ка. Вестник МГУ, сер.Математика и механика № 1, 1956.
3.Емельянов С. В.; Системы автоматического управления с.переменной структурой. М.,,Наука, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференцирующее устройство с переменной структурой | 1974 |
|
SU461421A1 |
| Устройство для преобразования сигналов в системах управления | 1977 |
|
SU641485A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Нелинейное корректирующее устройство | 1979 |
|
SU866539A1 |
| Нелинейное корректирующее устройство | 1977 |
|
SU857923A1 |
| Аналоговое устройство для определения частной производной | 1982 |
|
SU1053065A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГАРМОНИЧЕСКИХ ИСКАЖЕНИЙ ЭЛЕКТРИЧЕСКОГО СИГНАЛА И ЕГО ПРОИЗВОДНЫХ С ВЫСОКОЙ ПОМЕХОЗАЩИЩЕННОСТЬЮ | 2012 |
|
RU2522827C2 |
| Самонастраивающаяся система | 1980 |
|
SU928302A1 |
| Дифференцирующее устройство с переменной структурой | 1975 |
|
SU559248A1 |
| Фильтр низших частот для подавления резонанса контура регулирования параметра прокатки | 1983 |
|
SU1135510A1 |