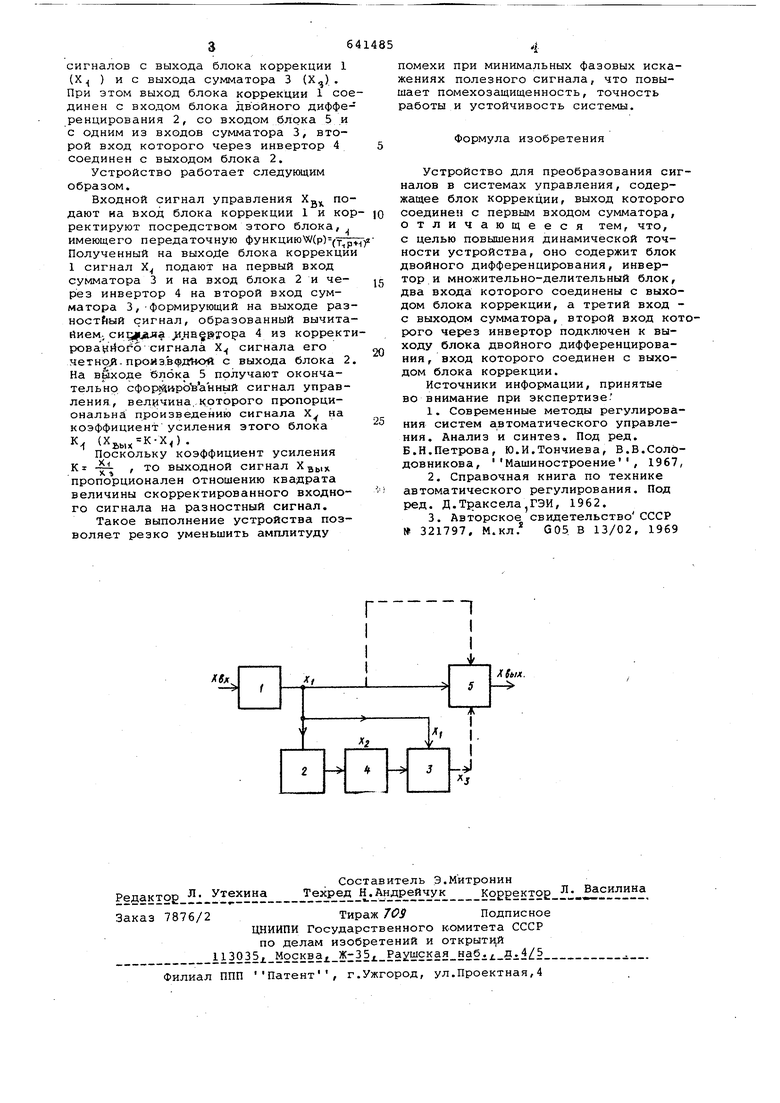
Изобретение относится к технике автоматического регулирования и пред назначено для повышения помехоустой чивости и точности систем управлени летательных аппаратов. Известны устройства для преобразования сигналов, в которые введены корректирующие устройства непрерывного действия для придания им требуемых динамических характеристик Однако каждое из них в отдельности характеризуется взаимно однозначным соответствием между видом переходного .процесса амплитудно-частотной и фазовой характеристик 1 и (2 . Наиболее близким по технической сущности к изобретению является уст ройство р , содержащее блок корре ции, выход которого соединен с перв входом сумматора, и нелинейное звено с ограничением. Это устройство позволяет уменьшить фазовые сдвиги по сравнению с линейными устройствами, но из-за наличия нелинейного звена с ограничением искажает форму выходного сигнала, что ухудшает точ ность работы и устойчивость систем регулирования и снижает помехозащищенность . Целью изобретения является повыше-ние помехозащищенности, устойчивости и точности работы системы. Поставленная цель достигается тем, что в предложенное устройство для преобразования сигналов в системах, автоматического управления, содержащем блок коррекции, выход которого соединен с первым входом сумматора, дополнительно введены блок двойного дифференцирования, инвертор и множительно-делительный блок, два которого соединены с выходом блока коррекции, а третий вход - с выходом сумматора, второй вход которого через инвертор подключен к выходу блока двойного дифференцирования, вход которого соединен с выходом блока коррекции. На чертеже приведена функциональная схема устройства. Устройство содержит блок коррекции 1, блок двойного дифференцирования 2, вырабатывающий на выходе сигнал четной производной входного сигнала (например, второй, четвертый и т.д.) сумматор 3, инвертор 4 и на выходе множительно-делительный блок 5, коэффициент усиления которого изменяется пропорционально отношению сигналов с выхода блока коррекции 1 (Х ) и с выхода сумматора 3 При этом выход блока коррекции 1 со динен с входом блока двойного диффе ренцирования 2, со входом блока 5 и с одним из входов сумматора 3, второй вход которого через инвертор 4 соединен с выходом блока 2. Устройство работает следующим образом. Входной сигнал управления Х- по дают на вход блока коррекции 1 и ко ректируют посредством этого блока, . имеющего передаточную функи.ию(р )(Полученный на выходе блока коррекци 1 сигнал Х подают на первый вход сумматора 3 и на вход блока 2 и через инвертор 4 на второй вход сумматора 3,формирующий на выходе раз ностйый сигнал, образованный вычита йиеМ; сим,дла jH, 4 из poaattrfoi o сигнала Х сигнала его HeTHpJt. произвфд куй с выхода блока 2 На выходе блока 5 получают окончательно сфор1йирЬЪ анный сигнал управления, величина,.которого пропорциональна произведению сигнала Х на коэффициент усиления этого блока -f ьых К-Х) . Поскольку коэффициент усиления Кг -г , то выходной сигнал X -- , ти выхиднии ;и1-пс1л лд, пропорционален отношению квадрата величины скорректированного входного сигнала на разностный сигнал. Такое выполнение устройства позволяет резко уменьшить амплитуду 4 помехи при минимальных фазовых искажениях полезного сигнала, что повышает помехозащищенность, точность работы и устойчивость системы. Формула изобретения Устройство для преобразования сигналов в системах управления, содержащее блок коррекции, выход которого соединен с первым входом сумматора, отличающееся тем, что, с целью повышения динамической точности устройства, оно содержит блок двойного дифференцирования, инвертор и множительно-делительный блок, два входа которого соединены с выходом блока коррекции, а третий вход с выходом сумматора, второй вход которого через инвертор подключен к выходу блока двойного дифференцирования, вход которого соединен с выходом блока коррекции. Источники информации, принятые во внимание при экспертизе 1.Современные методы регулирования систем автоматического управления. Анализ и синтез. Под ред. Б.Н.Петрова, Ю.И.Тончиева, В.В.Солодовникова, Машиностроение , 1967, 2.Справочная книга по технике автоматического регулирования. Под ред. Д.Траксела,ГЭИ, 1962. 3.Авторское свидетельствоСССР 321797, М.кл G05 В 13/02, 1969
| название | год | авторы | номер документа |
|---|---|---|---|
| Корректирующее устройство | 1977 |
|
SU696411A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Нелинейное корректирующее устройство | 1977 |
|
SU857923A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Интерференционный способ измерения перемещений и устройство для его осуществления | 1982 |
|
SU1108328A1 |
| Устройство для определения частотных характеристик динамических объектов | 1977 |
|
SU744474A1 |
| МНОГОМЕРНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1974 |
|
SU429640A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| СИНТЕЗАТОР ЧАСТОТЫ С ДЕЛЕНИЕМ НА ДРОБНОЕ ЧИСЛО И КОРРЕКЦИЕЙ ОСТАТОЧНОЙ ПОГРЕШНОСТИ И СПОСОБ СИНТЕЗА ЧАСТОТЫ | 1994 |
|
RU2134930C1 |
Хвл
XSbix.
