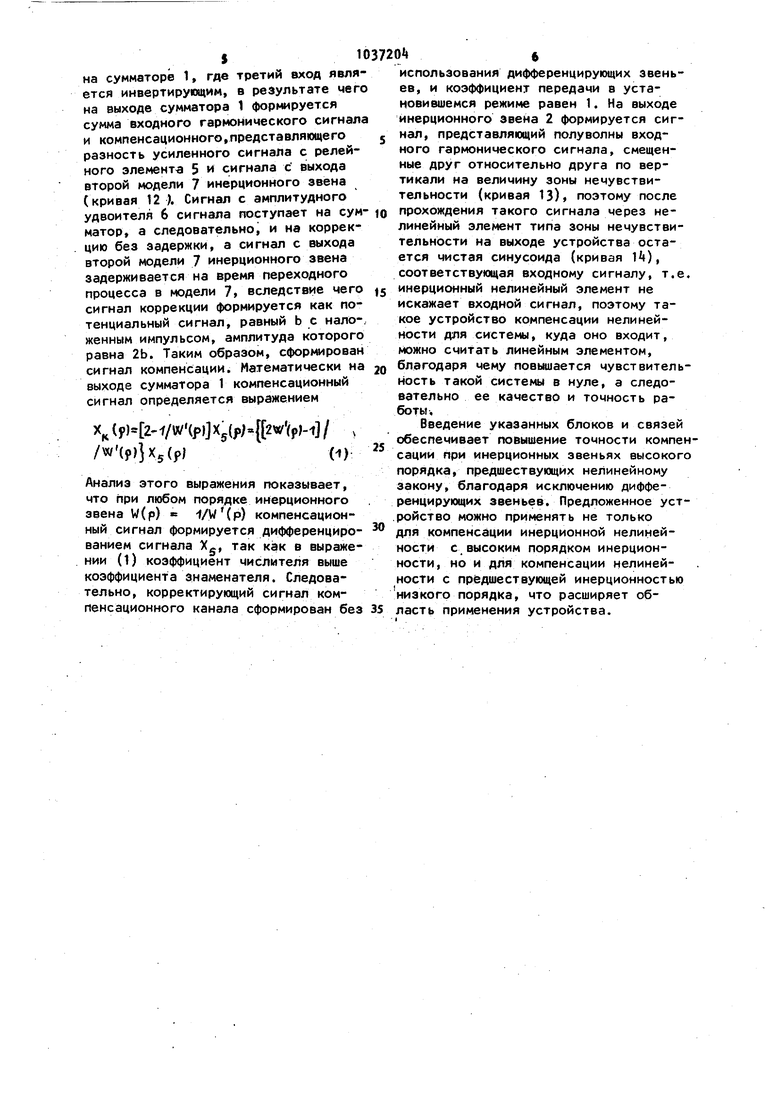
Изобретение, относится к автомати ческому регулированию и может быть использовано в следящих системах, сис темах стабилизации и программного ynt равления, в приборах вычислительной техники и автоматики и в другой аппаратуре, содержащей инерционный нелинейный элемент типа зоны нечувствительности, и предназначено для улучшения динамических характеристик этих систем. Известно устройство, содержащее последовательно соединенные сумматор и нелинейный элемент типа нечувствительности, а также релейный элемент, вход которого соединен с входом устройства, а выход - с вторым входом сумматора Г1 , Однако это устройство компенсирует только безинерционную зону нечувствительности и устраняет ошибку в системе, вызванную этой зоной. И если нелинейное звено с зоной нечувствитель ности является инерционным, например магнитный усилитель или электрогидравлический усилитель, то ошибка, вызываемая зоной нечувствительности, . устраняется неполностью. Промежуток времени, в течение которого зона нечувствительности не компенсируется, будет определяться длительностью переходного процесса в инерционном зве не , отражающем инерционные свойства нелинейного.элемента. Наиболее близким по технической сущности к предлагаемому является устройство компенсации нелинейности, содержащее последовательно соединенные сумматор, инерционное звено, отр жающее инерционные свойства нелинейности, нелинейное звено типа зоны не чувствительности, причем вход устрой ства через последовательно соединенные модель инерционного звена, релейный элемент и корректирующее звенс передатЬчная функция которого обрэтна передаточной функции инерционного звена, соединен с вторым входом сумматора С2 J . Известное устройство учитывает инерционные свойства нелинейного элемента, однако точность компенсации достигается только при инерционных звеньях низкого порядка. При высоком порядке инерционности из-за невозможности точной реализации передаточной функции корректирующего звена и плохой помехозащищенности точность компенсации нелинейности снижается. Применение известных методов проектирования корректирующих цепей не позволяет устранить указанные недостатки. Реальные корректирующие звенья строятся чаще всего на пассивных RC-цепях основным недостатком которых является ослабление полезного сигнала, проходящего через это звено, и поэтому для восстановления его уровня необходимы дополнительные средства усиления. Кроме того, если на полезный сигнал накладываются быстроизменяющиеся шумы и помехи, спектр которых расположен в области высоких частот, то эти шумы и помехи будут пропускаться устройством без ослабления. Существенное Ослабление полезного сигнала с одной стороны и пропускание без искажения помех с другой приводит к уменьшению соотношения сигнал-шум, что также снижает точность .компенсации .; Цель изобретения - повышение точности компенсации инерционной нелинейности типа зоны нечувствительности при высоком порядке инерционного звена, а следовательно, расширение области применения устройства. Эта цель достигается тем, что в устройство компенсации нелинейности, содержащее последовательно соединенные сумматор, инерциЬнное звено, нелинейное звено типа зоны нечувствительности, а также последовательно соединенные первую модель инерционного звена и релейный элемент, причем вход первой модели инерционного звена соединен с первым входом сумматора, введены вторая модель инерционного звена и амплитудный удвоитель сигнала, причем выход релейного элемента соединен через амплитудный удвоитель сигнала с вторым входом сумматора, а через вторую модель инерционного звена - с третьим входом сумматора. Введение амплитудного удвоителя, вход которого соединен с выходом релейного элемента, а выход - с вторым входом сумматора, позволило усилить сигнал компенсационного канала, что дало возможность ускорить поступление требуемой величины компенсационного сигнала на нелинейный элемент. Так, например, для инерционного звена первого порядка, стоящего перед нелинейным элементом, величина половины зоны нечувствительности которого равна Ь, время переходного процесса равно ЗТ, а если на вход инерционного звена поступает усиленный сигнал компенсации, равный 2Ь, то время достижения уровня требуемого сигнала компенсации Ь определяется из решения уравнения ,,т 2Ь(1 - )- Ь t 0,695Т. где Т - постоянная времени инерционного звена. Благодаря этому компенсационный сигнал поступает на нелинейный элемент почти без задержки, с задержкой ЗТ поступает удвоенный сигнал компен сации, поэтому для исключения влияния этого удвоенного компенсационног сигнала на точность компенсации вклю чается вторая модель инерционного звена, вход которой соединен с выходом релейного элемента, а выход с третьим входом сумматора, в резуль тате чего в момент окончания переходного процесса сигнал компенсации принимает требуемое для установившегося процесса значение, равное Ь. При этом требуемый компенсационный сигнал формируется без использования дифференцирующих звеньев, реализоват которые точно в случае высокого порядка инерционного звена практически невозможно. Кроме того, дифференцирующие звенья обладают низкой помехозащищенностью и при реализации на пассивных цепях вызывают существенное ослабление полезного сигнала. 8 связи с этим в предлагаемом устройст ве без использовани дифферецирующих цепей повышается точность компенсаци нелинейности для инерционных звеньев icoKoro порядка, а следовательно, улучша1ртся технические характеристики устройства, и область его применения расширяется. На фиг.1 изображена структурная схема устройства компенсации нелиней ности; на фиг.2 - графики формирования выходного напряжения устройства при входном синусоидальном. Устройство компенсации нелинейнос ти включает последовательно соединен ные сумматор 1, инерционное звено 2, нелинейное звено 3 типа зоны нечувст вительности, а также последовательно соединенные первую модель k инерционного звена, релейный элемент 5, амплитудный удвоитель 6 сигнала, при чем вход устройства соединен с входо первой модели t инерционного звена. 1 Ад а выход амплитудного удвоителя 6 - с вторым входом сумматора 1, и вторую модель 7 инерционного звена, вход которой соединен с выходом релейного элемента 5. а выход - с третьим, инвертирующим входом сумматора 1. Работа устройства компенсации нелинейности заключается в следующем. Входной сигнал поступаетна два канала - основной и компенсационный. Основной канал включает сумматор 1, инерционное звено 2, нелинейное звено 3 типа зоны нечувствительности. Компенсационный канал включает первую модель инерционного звена, релейный элемент 5 амплитудный удвоитель 6 сигналов, вторую модель 7 инерционного звена. На выходе сумматора t входной сигнал основного канала суммируется с сигналом компенсационного канала. В силу действия закона суперпозиции выходной сигнал сумматора 1 можно представить в виде суммы входного гармонического и компенсационного, поступающего в момент, определяемый инерционными свойствами нелинейного элемента, формирование компенсационного сигнала начинается в момент окончания переходного процесса на выходе первой модели инерционного звена, передаточная функций которой равна передаточной функции инерционного звена 2. Поэтому начало подачи сигнала компенсации совпадает с моментом времени, когда основной сигнал пройдет через инерционное звено и достигнет нулевого значения, т.е. момента, когда необходимо подать сигнал компенсации на нелинейность. На фиг.2 кривая 8 изображает входной синусоидальный сигнал в функции времени; кривая 9 сигнал на выходе первой модели Л инерционного звена (u)t+4)-W(yu))A К(у(4 -s5n(u)t+) де А - амплитуда входного сигнала; фазовый сдвиг, вносимый инерционным звеном;. OKJ)- коэффициент передачи инерционного звена. Сигнал Х поступает на релейный элемент 5, на выходе которого формируется сигнал Xg Ь sign X., где Ь половина величины зоны нечувствительности нелинейного элемента. Сигнал Хс поступает на амплитудный удвоитель 6 сигналов и на вторую модель 7 инерционного звена. Сигналы Х/(кривая 10) и Х-7{кривая 11) суммируются на сумматоре 1, где третий вход является инвертирующим, в результате чего на выходе сумматора 1 формируется сумма входного гармонического сигнала и компенсационного,представляющего разность усиленного сигнала с релейного элемента 5 и сигнала с выхода второй модели 7 инерционного звена (кривая 12 ). Сигнал с амплитудного удвоителя 6 сигнала поступает на сум матор, а следовательно, и на коррекцию без задержки, а сигнал с выхода второй модели 7 инерционного звена задерживается на время переходного процесса в модели 7, вследствие чего сигнал коррекции формируется как потенциальный сигнал, равный b с наложенным импульсом, амплитуда которого равна 2Ь. Таким образом, сформирован сигнал компенсации. Математически на выходе сумматора 1 компенсационный сигнал определяется выражением XK )2VWCplJXylpbfMpMJ / /W(p)5x5(p)(1) Анализ этого выражения показывает, что при любом порядке инерционного звена W(p) « -f/W(p) компенсационный сигнал формируется дифференцированием сигнала Х, так как в выражении (1) коэффициент числителя выше коэффициента знаменателя. Следовательно, корректирующий сигнал компенсационного канала сформирован без использования дифференцирующих звеньев, и коэффициент передачи в установившемся режиме равен 1. На выходе инерционного звена 2 формируется сигнал, представляющий полуволны входного гармонического сигнала, смещенные друг относительно друга по вертикали на величину зоны нечувствительности (кривая 13), поэтому после прохождения такого сигнала через нелинейный элемент типа зоны нечувствительности на выходе устройства остается чистая синусоида (кривая 14), соответствующая входному сигналу, т.е. инерционный нелинейный элемент не искажает входной сигнал, поэтому такое устройство компенсации нелинейности для системы, куда оно входит, можно считать линейным элементом. благодаря чему повышается чувствительность такой системы в нуле, а следовательно ее качество и точность работы. Введение указанных блоков и связей обеспечивает повышение точности компенсации при инерционных звеньях высокого порядка, предшествующих нелинейному закону, благодаря исключению дифференцирующих звеньев. Предложенное устройство можно применять не только для компенсации инерционной нелинейности с высоким порядком инерционности, но и для компенсации нелинейности с предшествующей инерционностью низкого порядка, что расширяет область применения устройства.
вд.Х
4
V-i
/9
Xff,X7
/Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации нелинейности | 1986 |
|
SU1444705A1 |
| Устройство для компенсации инерционной нелинейности типа насыщения | 1980 |
|
SU940129A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1550473A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
УСТРОЙСТВО КОМПЕНСАЦИИ НЕЛИНЕЙНОСТИ, содержащее последовательно соединенные сумматор, инерционное Лд .звено, нелинейное звено типа зоны нечувствительности, а также последовательно соединенные первую модель инерционного звена и релейный элемент, причем вход первой модели инерционного звена соединен с первым входом сумматора, о т л и чающее с я тем, что, с целью повышения точности устройства и расширения области его применения, в него введены вторая модель, инерционного звена и амплитудный удвоитель сигнала, причем выход релейного элемента соединен через амплитудный удвоитель сигнала с вторым входом сумматс а и через вторую модель инерционного звена - с третьим входом сумматора. О) с .1Й..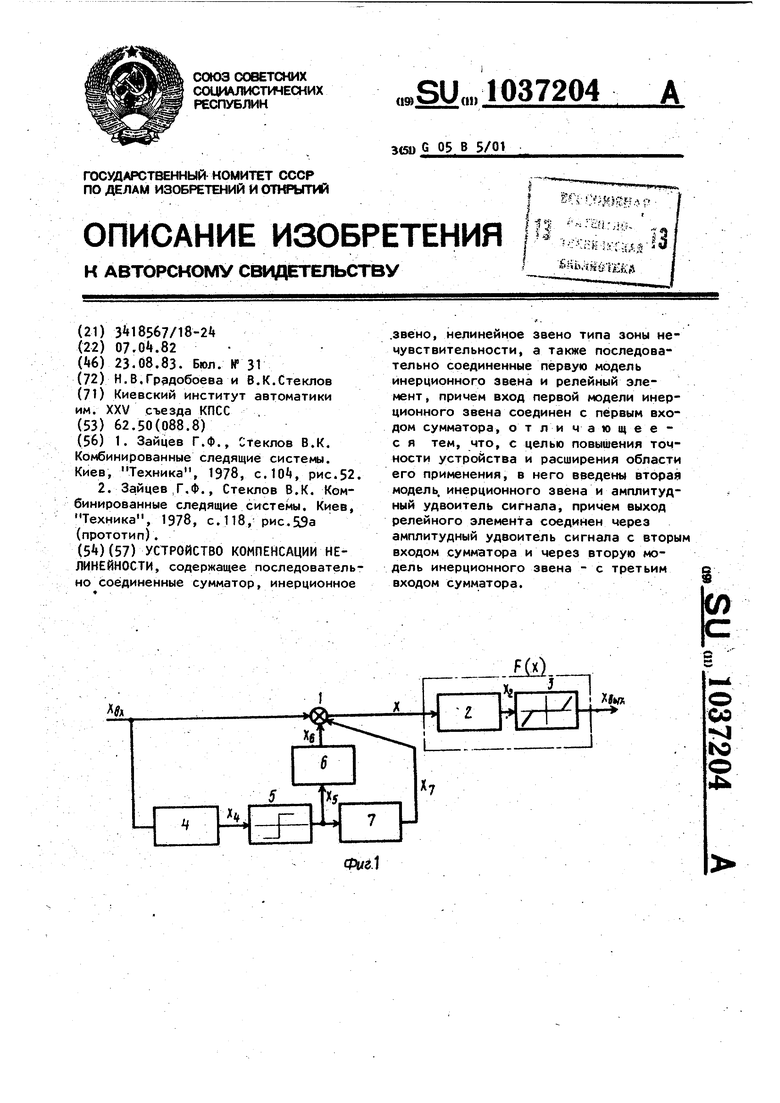
J
J
ХЛ/А
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зайцев Г.Ф., Стеклов В.К | |||
| Комбинированные следящие системы | |||
| Киев, Техника, 1978, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Зайцев ,Г.ф., Стеклов В.К | |||
| Комбинированные следящие системы | |||
| Киев, Техника, 1978, с.118, рис.Эа (прототип). | |||
