(54) ПЕРЕДВИЖНОЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2076840C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| Подъемник | 1987 |
|
SU1430338A1 |
| ".'О ЗНАЯ•''"'"^"СШ ць** &iSAМ. Кл. В 66f 7/08УДК 621.876.113(088.8) | 1973 |
|
SU384788A1 |
| Подъемник | 1990 |
|
SU1754638A1 |
| ПОДЪЕМНИК | 1991 |
|
RU2035390C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |

. Г
..у. .
Изобретение относится к поцъемноiipuHcnopTHbiM механизмам и может быть использовано в передвижных подъемных устройствах с достато 1но большой высотой подъема и небольшими транспортными габаритами.
Известен подъемник для обслуживания транспортных средств, содержащий опорную платформу с ходовой частью и грузовую платформу, опирающуксяна шарнирно-рычажный механизм с силоызтм цилиндром раз движения, шарнирно подвешенным на центральной оси шарнира рычажного механизма ijНедостатком указанного подъемника являются большие габариты в тра:нспор1%ном положении, что ограничивает область его применения.
Наиболее близким техническим решением к изобретению является передвиж- ной подъемник, содержащий опорную платформу с ходовой частью и грузовую платформу, опирающуюся на приводной . от силового элемента рычажный механизм, состоящий из четного числа пар рычагов, образующих при взаимном соединении подвижные параллелограммы, первая: из которых обязана с опорной платформой, а последняя - с грузовой платформой 2.
Указа аный по|тьвмник имеет малые габариты в сложенном положении, что достигается усложнением его конструкции. Наличие нескольких силовых циолиндров, требующих синхронизации их работы, введение гибких тяг, переброшенных через канатные шкивы, значительно ; снижает надежность работы подъемники.
5
Цель изобретения - уменьшение габаритов подъемника в транспортном положении и повышение надежности.
Для этого в предлагаемом устройстве рычаги выполне1&1 Г-образными и неравноплечими, подвижные паралле.;. лограммы образованы посредством шарнирного соединения коротких плеч рычагов четных, пар с короткими плечами
37
рычагов предыдзгтцих нечетных пар и длиных плеч рычагов четных пар с длинными плечами рычагов последующих нечетных пар, при этом шарнир, связывающий между собой рычаги каждой четной пары, расположен ниже шарнира, азязывающего между собой рычаги предыдущей нечетной пары, а рычаги каждо пары соединены между собой в средней точке так, что их одноименные пле1И расположены по одну сторону от соединяющего их шарнира.
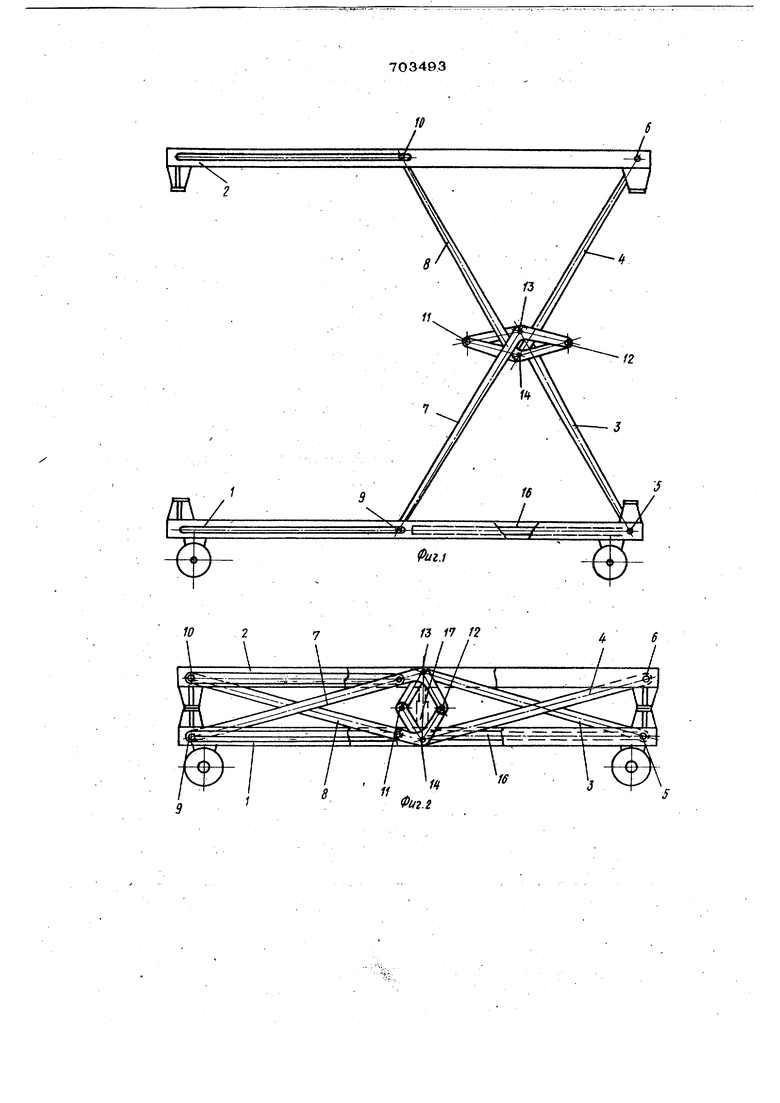
На фиг. 1 изображен предлагаемый подъемник в рабочем положении; на фиг. то же устройство в транспорт ном положении; на фиг. 3 - то же, вид сверху.
Подъемник состоит из опорной платформы 1 с ходовой частью и грузовой платформы 2. Длинные плечи пар Г-образных рычагов 3 и 4 соединены с опорной 1 и грузовой 2 платформами неподвижньтми шарнирами 5 и 6, а двух других пар рычагов 7 и 8 - подзижными шарнирами 9 и 10, установленными в направляющих, выполненных на платформах. Короткие плечи пар рычагов соответственно соединены подвижными шарнирами 11 и 12. Пары рычагов. 3, 4 и 7, 8 шарнирами 13 и 14 соединены в шарнирные четырехзвенники, короткие плечи которых образуют подвижные параллелограммы. Шарниры 9 связаны между собой жесткой связью 15, к которой может быть присоединен силовой элемент 16, например гидропилиндр, закрепленный на опорНой платформе.
При включении силового элемента на подъем происходит сближение подвижных шарниров 9 с неподвижными 5, при этом шарниры 11 и 12 подвижных параллелограммов расходятся, а шарниры 13 и 14 сближаются, что вызывает сближение подвижных шарниров 10 с неподвижными 6. При этом платформа 2 поднимается вверх.
Опускание платформы происходит в обратной последовательности.
Для уменьшения рабочего хода силового элемента он может быть вклю4934
чен в диагональ подвижного параллелограмма. 3 этом случае при включении , силового элемента 17 на подъем усилием сжатия происходит сближение шар-. 5, ниров 13 и 14, в результате чего происходит подъем платформы 2. При этом элемент 16 исключается.
Применение предлагаемого подъемника позволяет принезначительных его габаритах в транспортном положении обеспечить большую высоту подъема грузовой платформы при небольшом ходе силового элемен -а.
Формула изобретения
, Передвижной подъемник, содержащий опорную платформу, смонтированную на ходовой части,и грузовую платформу, опирающуюся ни приводной от силового элемента рычажный механизм, состоящий из четного числа пар рычагов, образующих при взаимном соединении
j подвижные параллелограммы, первая из которых связана с опорной платформой, а последняя - с грузовой платформой, отличающийся тем, что, с целью уменьшения габаритов подьемниp ка в транспортном положении и повышения надежности, рычаги выполнены Г-образными и неравнбплечими, подвижные параллелограммы образованы посредством шарнирного соединения коротких плеч
J рычагов четных пар с короткими плечами рычагов предыдущих нечетных пар, и длинных плеч рычагов четных пар с длинными плечами рычагов последующих нечетных пар, при этом шарнир, связыj, вающий между собой рычаги каждой пары, расположен ниже шарнира, связывающего между собой рычаги предыдущей нечетной Пары, а рычаги каждой пары соединены между собой в средней точке
5 так, что, их одноименные плечи расположены по одну сторону от соединяющего их шарнира.
Источники информации, принятые во внимание при экспертизе
Q 1. Патент Франции № 22ОО19О, кл. В 66 F 11/08, 1974.
,
7O3-403
fngrЧ,1Гг4,
Фыг. -
7 S
A
tXntr
Г6
