:СО
4
09 О
оо
Од 00
ду опорной 1 н под7 емной 8 гшатфор- мамн и присоединяемый к Ш1М с помощью поворотнык нижних 2 и верхних 7 толкателей, выполнен из двух участков - нижнего призматического 4 и верхнего пирамидального 5. Лпя обеспечения требуемого направления раз- движения рычагов 11 из сложенного положения кронштейны 6 снабжены ограничительными упорами. Шток 15 гидроцилиндра привода подъема установлен с возможностью взаимодействия непосредственно с подъемной платформой 8 и посредством телескопических тяг связан с кронштейнами 3 не ниже второго уровня нижнего участка 4. Подъем платформы 8 на первом этапе производится непосредственно штоком 15. При этом ШРМ начинает растягиваться На определенной высоте подъема происходит натяжение тяг 16 и дальнейший подъем осуществляется воздействием штока 15 через эти тяги на кронштейны .3о 1 з„По ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1990 |
|
SU1754638A1 |
| ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ | 2000 |
|
RU2184074C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| Подмости | 1990 |
|
SU1776739A1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| Шаговый подъемник | 1990 |
|
SU1740313A1 |
| Подъемник | 1989 |
|
SU1744061A1 |

Изобретение относится к лодъём- но-транспортным средствам и может найти применение при монтаже и обслуживании высоковольтных линий элек тропередач и высотных сооружений Цель изобретения - пдвышение грузо-: подьемности, высоты подъема и удовст ва в эксплуатации. Шарнирно-ричажныЙ механизм (ШРМ), - располагаемый.меж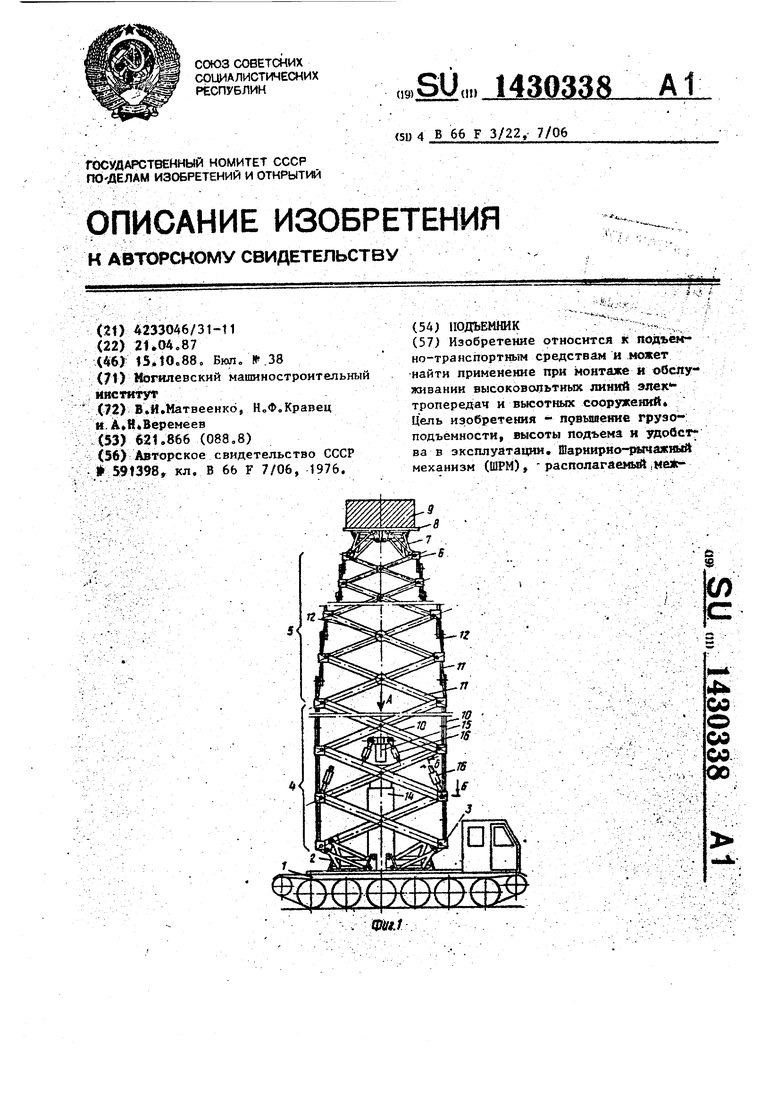
1
Изобретение относится к подъемно- транспортным устройствам и может быть использовано при монтаже и обслуживании высоковольтных линий электропередач и других высотных сооружений.
Цель изобретения - повышение грузоподъемности, высота подъема и удобства в эксплуатации.
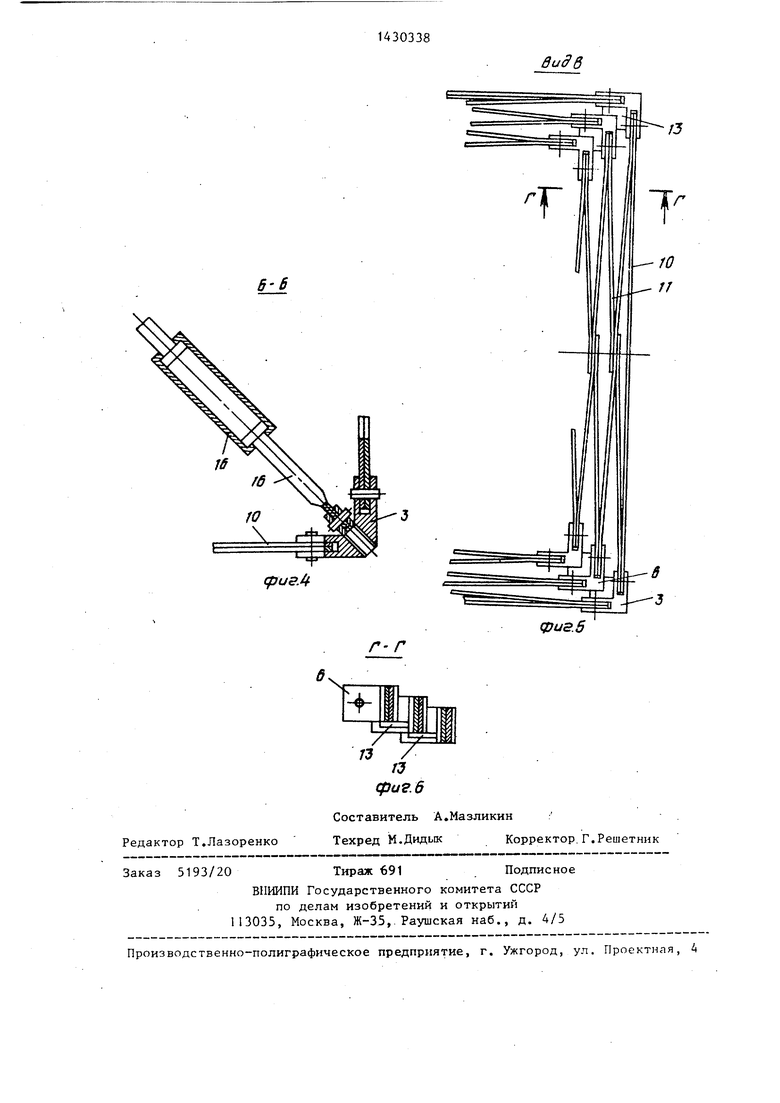
На фиг.1 изображен подъемник в поднятом положении подъемной платформы, вид сбоку; на фиг.2 - то же, в сложенном положении; на фиг,3 - вид А на фиг о 1; на фиг.4 - разрез Б-Б на фиг.1; на фиг.5 - вид В на фиг о 2; на фиг „6 - разрез Г-Г на фиг
Подъемник содержит опорную платформу 1 с ходовым аппаратом. На ней шарнирно смонтированы одними концами нижние толкатели 2„ Другие концы толкателей также связаны шарнирнО с нижними кронштейнами .3 шарнирного механизма, состоящего из призматического 4 и пирамидального 5 участков. К верхним кронштейнам 6 с помощью верхних толкателей 7 присоединена подъемная платформа 8 с поднимаемым грузом 9 о Призматический участок 4 механизма состоит из рычагов 10 одинаковой длины, шарнирно соединенных- попарно между собо й в средней части, одни и другие концы которых шарнирно присоединены к кронштейнам 3. Пирамидальный участок 5 механизма состоит из рычагов 11 различной длины, попарно соединенных между собой центральным шарниром 12
0
5
0
5
0
5
смещенным в сторону других плеч рычагов на одну и ту же величину. Рычаги 11 выполнены с возможностью упругого изгиба в плоскости, проходящей через продольные.оси шарниров. Одни и другие концы рычагов 11 также шарнирно присоединены к кроншт ейнам 6, которые снабжены ограничительными упорами 13. На опорной платформе транспортного средства смонтир ован телескопический гидроцилиндр 14, шток 15 которого телескопически ми тягами 16 соединен с кронштейнами 3 не ниже второго уровня Тяга 16 шарнирно присоединяется к кронштейну 3 в точке, расположенной посредине между местами шарнирного присоединения рычагов 10о
, ,
Подъемное устройство работает следующим образом.
I
В исходном, транспортном положении шарнирно-рычажный механизм на- ходитс5} в сложенном положении. Кронштейны 6 опираются в ограничительные упоры 13 нижележащих кронштейнов, а кронштейны 3 опираются непосредственно о нижележащие Все подъемное устройство в исходном положении лежит на опорной платформе транспортного средства 1, опираясь на кронштейны 3 первого уровня о При этом рычаги 11 и кронштейны 6 расположены внутри нижележащих, что обеспечивает уменьшение габарита по высоте пирамидального участка 5 шарнирно-рычажного
механизма. Телескопические тяги 16 укорочены, Тово между, их тяговыми . элементами образованы зазоры. Перед подъемом платформы 8 опорная платформа 1 транспортного средства с помощью выносных опор ( не показано) выставляется горизонтально. Подъем платформы 8 на первом этапе произво-Y дится непосредственно упором штока 15 гидроцилиндра 14. При этом весь шар- нирно-рычажный механизм начинает растягиваться Нагрузка на шток.15 гидроцилиндра 14 незначительна Так как скорость подъема платформы 8, а равным образом.и скорость вьщвижения штока гораздо больше, чем скорость подъема кронштейнов 3 нижних уровней, то на первом этапе происходит удлинение телескопических тяг 16-без нагрузки за счет уменьшения зазоров между ее элементами На определенной высоте подъема происходит натяжение тяг 16 и дальнейший подъем платформы 8.осуществляется воздействием штока 15 через эти тяги на кронштейны 3. При этом скорость выдвижения штока гораздо меньше скорости подъема платформы 8 и нагрузка на шток резко возрастаете Однако эта нагрузка имеет меньшее значение, чем нагрузка на шток цилиндра при креплении тяг 16 . к кронштейнам 3 первого уровня. Нагрузка от тяг 16 на кронштейны 3 передается симметрично относительно точек крепле ния рычагов 10.
При раздвижении шарнирно-рычаж- ното механизма и достижении угла между продольной осью рычага и вертикалью в пределах 30..35 подъем заканчивается. Дальнейший йодъем нецелесообразен, так как происходит быстрое уменьшение поперечного сечения механизма с незначительным уве- личением высоты подъема
Опускание подъемной платформы 8 производится в обратной последовательности.
Фо.рмула изобретения
5
0
5
0
5
0
5
0
телей с пространственной шарнирно- рычажной системой типа нюрнбергские но кницы, стороны которой выполнены из нескольких пар, смонтированных друг на друге перекрещивающихся рычагов, шарнирно связанных между собой,, и кронштейнов, расположенных по углам сторон и шарнирно связывающих одни и другие концы плеч рычагов смежных сторон, расположенных , в одной горизонтальной плоскости на разных уровнях по-высоте, одни концы нижних и одни концы верхних толка- телей соответственно связаны шарнирами с опорной и подъемной платформами, а другие - с кронштейнами, расположенными в нижней и верхней частях подъемника, привод подъема, выполнен- ньй в виде смонтированного на опорной платформе силового цилиндра, выдвижной шток которого шарнирно связан с одними концами тяг, другие концы которых шарнирно связаны с кронштейнами подъемника, отличающийся тем, что, с целью повьш1ения грузоподъемности, высоты подъема и удобства в эксплуатации, по меньшей мере часть шарнирно-ры- чажного механизма выполнена пирамидальной формы, в которой рычаги каждого верхнего яруса выполнены меньшей длины рычагов нижнего яруса, а центральные шарниры перекрещивающихся рычагов смещены в сторону других концов плеч на одинаковую величину, кронштейны снабжены ограничительными упорами для фиксации рычагов в нижем положении подъемной платформы. Тяги выполнены телескопическими ограниченного перемещения, причем другие концы их соединены с кронштейнами, расположенными не ниже второго яруса подъемника, при этом шток силового цилиндра смонтирован с возможностью непосредственного взаимодействий с подъемной платформой в нижнем ее положении
JO
(fius.Z
Вид A
гз
6-6
(ригЛ
виде
фиг. 6
| Пространственный рычажный механизм подъемника | 1976 |
|
SU591398A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
