(54) УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки нити | 1978 |
|
SU745840A1 |
| Устройство для намотки нити | 1980 |
|
SU895869A1 |
| Устройство для намотки нити набОбиНу | 1978 |
|
SU815092A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| Бесфрикционное намоточное устройство | 1989 |
|
SU1694470A1 |
| ФИЛЬТРУЮЩИЙ ЭЛЕМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1990 |
|
SU1824744A1 |
| УСТРОЙСТВО ДЛЯ НАМАТЫВАНИЯ ПРЯЖИ НА КОНИЧЕСКУЮ ПАКОВКУ | 1991 |
|
RU2019492C1 |
| Устройство для наматывания нити | 1987 |
|
SU1497142A1 |
| УСТРОЙСТВО ДЛЯ ФРИКЦИОННОГО НАМАТЫВАНИЯ ПРЯЖИ НА КОНИЧЕСКУЮ ПАКОВКУ | 1991 |
|
RU2008246C1 |
| Автоматическое мотальное устройство | 1977 |
|
SU825437A1 |
Изобретение относится к текстиль ной промышленности, а именно к приемно-намоточным устройствам машин для производства химических волокон с высокой и постоянной скоростью приема нити на вращающуюся бобину.
Известно устройство для намотки нити на бобину, содержащее бобйнбдержатель, связанный с элек1 родвигателем, нитераскладчик, прикаточ:ный ролик с механизмом прижима его к бобинодержателю, связанный с тахометрическим преобразователем, адатчик и датчик скорости намотки 1.
Недостаток указанного устройства заключается в том, что при высокоскоростном наматывании не удается избежать вибраций вратаюв(ихся тел и снижения качества намотки вследствие наличия эксцентриситета, некруглости и неполной уравновешенноети бобинодержателя с патроном и прикаточного ролика, возникающих из-за конечной точности изготовления деталей и сборки их при монтаже устройства, а также вследствие перем;енности массы и частоты врацег ния бобинодержателя в период нама- тывания.
Цель изобретения - повышение качества намотки нити при повышенных скоростях ее подачи.
Достигается это тем, что прикаточный ролик выполнен полым и имеет амортизатор, связанный с его осью а тахометричейкий преобразователь смонтирован в ролике.
Считываюищй элемент тахомеТри0ческого преобразователя установлен на оси а его модулирующий элемент на поверхности полого ролика.
Амортизатор выполнен в виде пружин, каждая из которых связана с осью
5 1эолика, а другим - с механизмом прижима.
Амортизатор имеет два корпуса с расположенными в них подпружиненными штоками, при этом штоки связа0ны с осью ролика, а корпуса - с механизмом прижима.
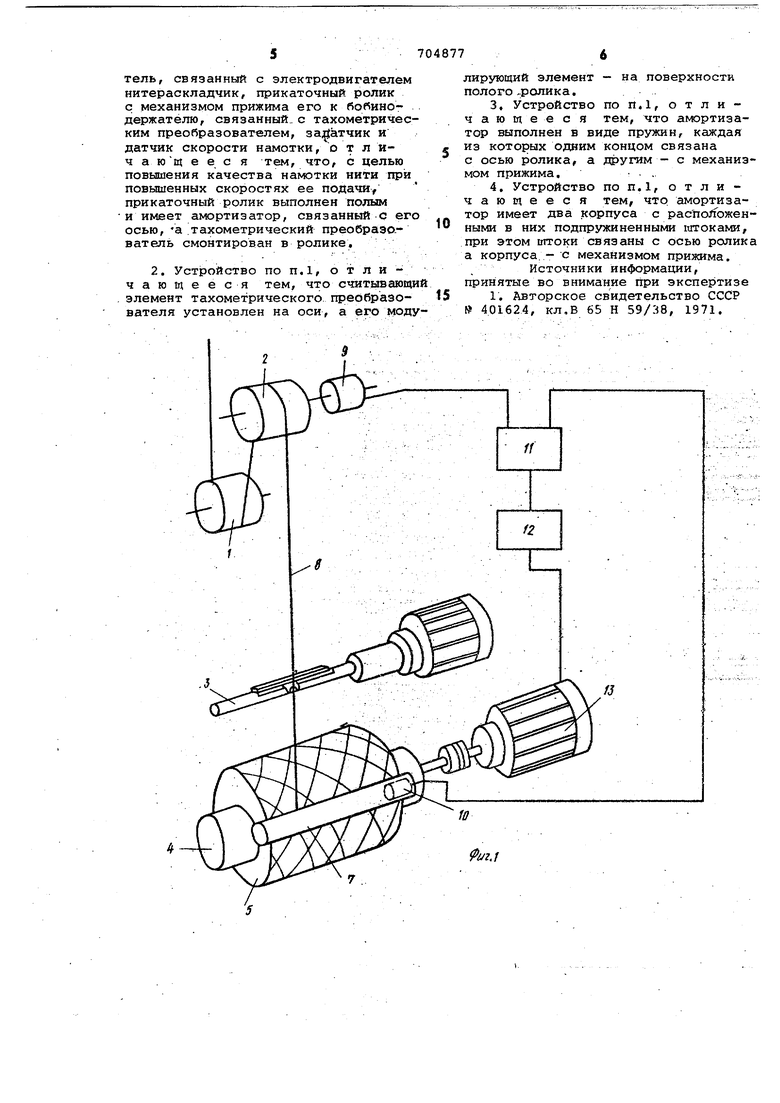
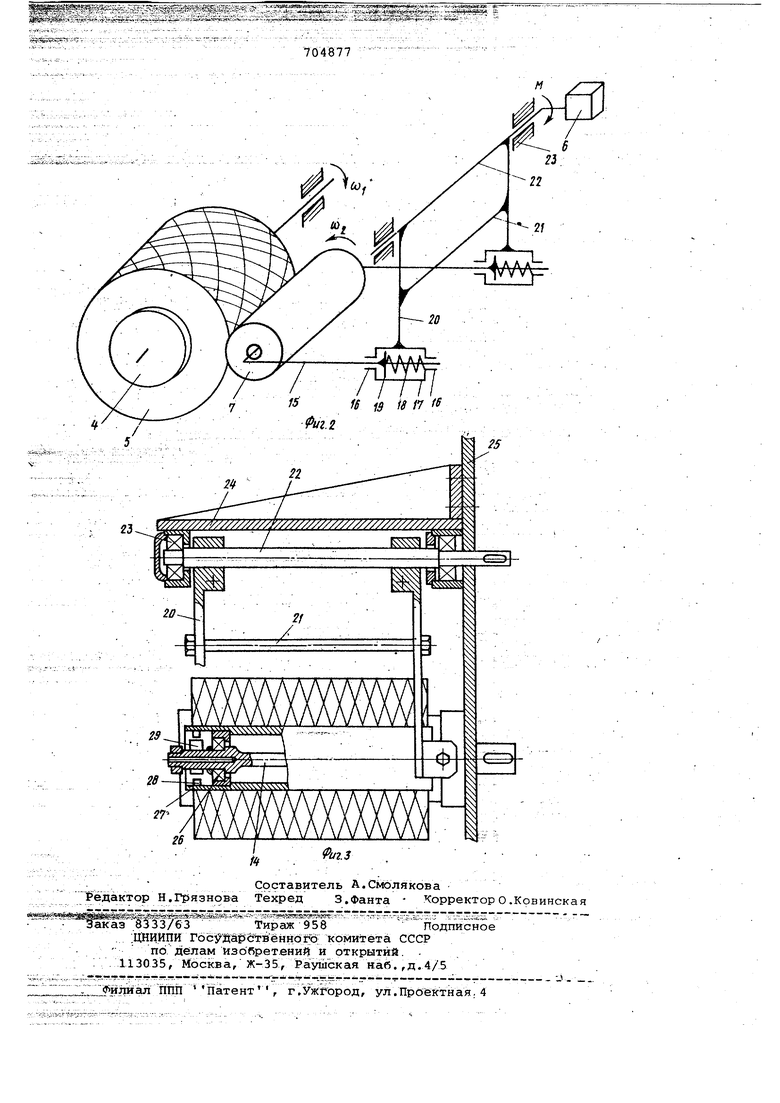
На фиг.1 показана кинематическая схема устройства; на ()иг.2 - то же с амортизаторами в виде пружин;
5 на фиг.З - то же, вид сбоку.
Устройство для намотки нити на бобИну включает нижний, и верхний прядильные диски 1 и 2, нитераскладчик 3, бобинодержатель 4 с наматыO
ваемой паковкой 5/ к которой с поощью приводного устройства б приимается прикаточный ролик 7, сЛуащий для измерения скорости наматывания нити 8 на паковку, а также для получения заданной плотности паковки. С ротором верхнего прядильного диска связан датчик скорости 9 подачи нити, а с паковкой 5 фрикционно связан прикаточный ролик 7 с размещенными внутри его тахоМетрическим преобразователем 10. Выводы датчика скорости 9 подачи нити в намотку и тахометричёского преобразбвателя 11, выход которого подключён - к регулируемому преобразователю 12, Выход регулируемого преобразрвателя 12 подключен к электродвигателю 13 вращения бобины. Ось 14 прикаточного ролика-7 закрепле- . на на концах штоков 15. установленных в направляющих 16 корпусов 17. Внутри корпусов 17-разметены пружины 18, из которых одним концом упирается в расположенный между направляющими 16 кольцевой вь1ступ 19 в расположенный между направляющими 1 6 кольцевой выступ 19 штока 15, а- вторым концом - в дном корпу.са 17. Корпусы 17 жестко прикреплены к концам рычагов 20, образующих совместно со связывающей рычаги поперечной 21 и валом 22 жесткую раму. Осивращения паковки прикаточного ролика 7 и вал 22 поворотной pa;}vfci МеханизмаПрижима параллельны между собой. Вал 22 установлен
Вподшипниках 23 и с-помощью кронштейна 24.крепится к облицовке машины 25. Вал 22 соединен сприводным устройством 6 прижима рьлйка к паковке, в качестве которого .может быть использовано одно из известных устройств с грузовым гидрав лическйм или пневматическим приводом, Невращающаяся ось 14 прикаточного . ролика 7.расположена в шарикоподшипниках 26. На наружных кольцах подшипников закреплен ротор 27 прикаточного ролика 7/,выполненный в виде полого цилиндра. Модулирующий элемент
28 тахометричёского преобразователя 10 ж;ёеткЬ соединен с ротором, насприМер закреплен на роторе с внутренней стороны. Считьзвающее устройство 29установлено на невращающейся оси 14 прикаточного ролика 7. Для свободного доступа к тахометрическому -преобразователю 10 опорные подшипАсКй смещены симметрично от торцов прикаточного ролика 7 к центру.
Приводное устройство б с определенным усилием прижимает к вращающейся па:ковке 5 прикаточный ролик 7, который обкатывая наружный слой паковки , преобразует ее окружную ско рость в угловую скорость ролика. Кроме того, укатывая боковую поверхность паковки с определенным давлением, прикаточный ролик 7 способствует формированию требуемой плотности паковки..
Вследствие эксцентриситета и некруглости патрона бобинодержателя в паковки прикаточный ролик 7 в процессе наматывания перемещается.по направлению к паговке и от нее, совершая, таким образом, колебания, сопровождающиеся появлением инерционых сил. Благодаря упругой связи прикаточного ролика 7 с механизмом йрижима и уменьшению массы прикаточ ного ролика 7 силы сжатых пружин 18, действующие через штоки 15 на концы оси прикаточного ролика 7, преодолевают силы инерции ролика и последний остается в непрерывном фрикционном зацеплении с паковкой.
Частотный тахометрический преобразователь 10- выполнен на базе модуляторного параметрического преобразователя угловых перемещений в число импульсов ,и состоит из модулирующего элемента 28 и считывающего устройства 29. При этом применен такой параметрический преобразователь перемещений,который по действия при.вращении не созда дополнительных моментов сопротивлен например, электромагнитного момента, трения или аэродинамического В качестве безмоментных преобразователей перемещения, могут быть исполы зованы, например, Фотоэлектрические или емкостные преобразователи, а также преобразователи с.использованием магнито-резисторов, датчиков Холла и некоторые другие.
.Тахометрический преобразователь, 10 и датчик 9 угловой скорости верхнего прядильного диска посылает в устройство.сравнения 11 электрические сигналы, пропорциональные соответственно скорости наматывания и подачи нити в намотку. По мер роста диаметра паковки возрастает ее окружная скорость и угловая Скорость прикаточного ролика, что приводит к изменению частоты выходного сигнала тахометричёского .преобразователя 10.
Устройство сравнения сигналов скорости 11 выявляет Факт.отклонения соотноиения контролируемых скоростей от заданного значения и через регулируемый преобразователь воздействует на., электродвигатель бобинодержателя, который снижает .. свою угловую скорость до значения, при которомвосстанавливается заданноезначение скоростей наматывания и подачи нити в намотку.
Формула изобретения
V
