(54) УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки нити | 1987 |
|
SU1461735A1 |
| Устройство для намотки нити набОбиНу | 1978 |
|
SU815092A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| "Устройство для намотки нити на бобину | 1977 |
|
SU704877A1 |
| Мотальная машина | 1990 |
|
SU1720976A1 |
| МОТАЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2019491C1 |
| Устройство для намотки нити на бобину | 1991 |
|
SU1770245A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРТИИ БОБИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2483015C2 |
| Устройство для намотки нити | 1978 |
|
SU745840A1 |
1
Изобретение относится к производству xjf мических волокон и касается устройства для намотки нити на прядильных машинах.
Известно устройство для намотки нита, содержащее мотальную головку, смонтированную в вертикальных направляющих с возможностью вертикального перемещения, и неподвижно закрепленный .бобинодержатель (Т. На мотальной головке установлены кулачковый нитераскладочньШ механизм, нитераскладочный барабан с -винтовой канавкой и прикаточный ролик. Средства поддержания усилия прижима прикаточного ролика к наматываемой паковке ъ данном устройстве состоят из пневмоциг лкндров, компенсируюших вес мотальной головки с установленными в ней механизмами. Пиевмощшкидры смонтировань в станине, а поршнисоединены с шатунами, шарии жо связанными с верхней внутренней стенкой мотальной головки. Для устранения утечки воздуха через зазор между поршнем-и внутренней поверхностью цилиндра установлены эласппные мембраны, прикрепленные с одной стороны между фланцами цилиндра, а с другой к нижней торцовой поверхности поршня.
Усилие прижима прикаточного ролика к наматываемой бобине в процессе намотки регулируется в зависимости от диаметра наматываемой бобины посредством изменения давления воздуха в пневмоцилиндрах с помопхью вентилей, которые срабатывают при нажатии на них поднимающихся по мере увеличегая диаметра паковки мотальной головки.
to
Недостатком рассматриваемого устройства является то, что применение в качестве средств поддержания усилия прижима пневмошшиндров усложняет конструкцию устройства: требуется установка компрессора для питания элеметов
15 пневмопривода сжатым воздухом высокого давления; реализация устройства регулирования усилия прижима, изменяющегося в процессе намотки по заданиому закону, приводит к существенному усложнению регулирующих
20 средств; применение жатого воздуха создает шум на рабочих местах.
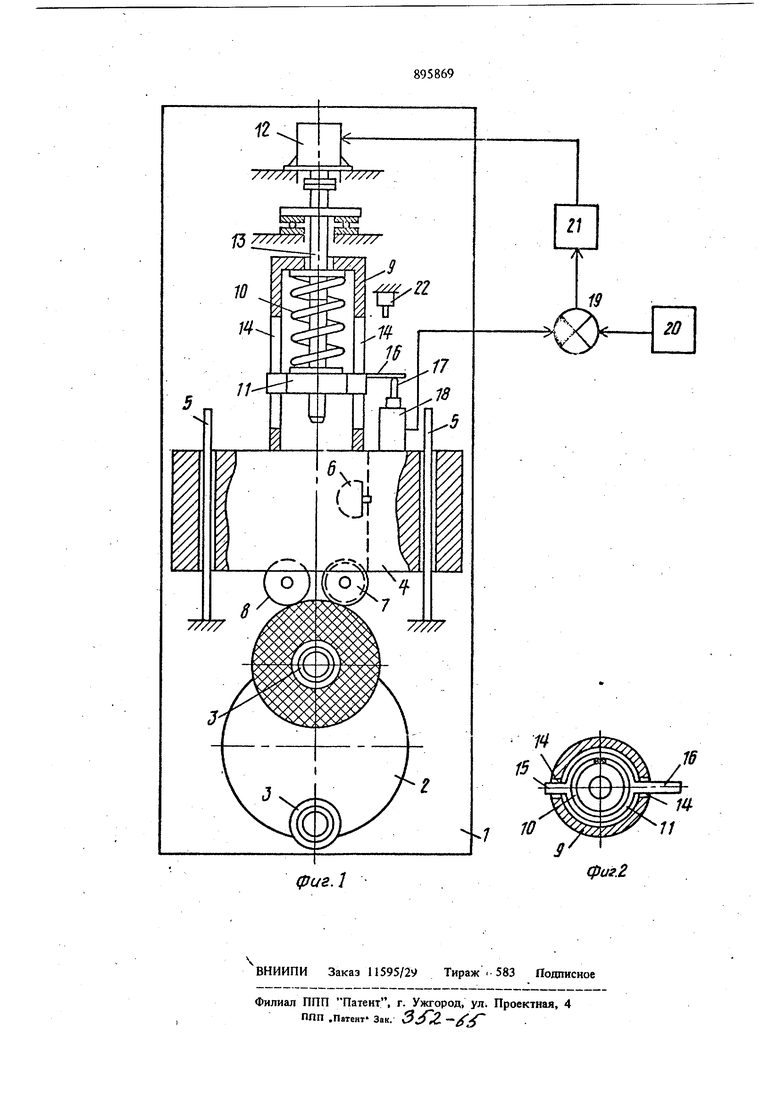
Известна также машина для наматывания пряжи, содержащая приводной ролик с канавicaiHM, кулачковый нитераскладочный механизм, установленные на кортусе маишны, а также две подвижные каретки с бобннодержателями, перемещающимися по наклонным направляющи к приводному ролику 2. Машина также содержит средства для подцержания усилия прижима бобинодержателей к приводному ролику, состоящие из двух механизмов компенсации изменяющегосй в процессе намотки веса кареток с бобинодержателями, на которые наматывается паковка, и электродвигателей, связанных шарико-винтовой передачей с каретками и служащих для создашш регулируемого в процессе намотки усилия прижима. Механизмы для компенсации веса кареток с бобинодержателями снабжены пружиной, укрепленной на корпусе машинь и с помощью троса связанной с профилированным кулачком, ось которого также находится на корпусе машины; кулачок связан с помощью крутого троса, проходящего через направляющие шкивы, с подвижной кареткой, несущей бобинодержатель. Профиль кулачка определяется характе|РОМ постоянных и переменных сил, действуI ющих на каретку с бобннодержателем в про.цессе намотки. Каждая кареткаснабжена Ьвоим механизмом компенсации. Для перемещения каретки с бобинодержателем из положения съема паковок в поло жение для намотки и обратно, а также для создания усилия прижима бобинодержателя с паковкой к приводному ролику каждая каретка связана с серводвигателем посредством шарико-винтовой передачи. В процессе регулирования прижима электродвигатель работает в моментном режиме. На электродвигатель подается такое напряженна, чтобы совместно с отмеченньпм выше механизмом компенсации электродвигатель обеспечивал заданное усилие прижима. Недостатком устройства является то, что оно имеет сложную конструкцию кинематической части, содержашук) множество шкивов, профшгаровагшые кулачки, гибкие связи в виде тросов, пружины. Это усложняет эксплуатацию устройства для намотки. Кроме того, в устройстве не предусмотрены датчики вели4HHjji усилия прижима и поэтому корректиров ка усилия прижима при отличии его от задан ного значения невозможна. Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство для намотки нити, содержащее бобинодержатель, мотальную головку, размещенную над бобииодержателем в вертикальных направляюитх и несущую 1штераскла дочные элементы, фрикционный валик и корпус механизма прижима фрикционного валика к наматьтаемой паковке, и систему управле}шя мехашзмом прижима с чувствительным элементом 13. Привод перемещения мотальной головки, механизм прижима фрикционного валика к наматываемой паковке, а также система управления механизмом прижима выполнена пневматическими. Существенным недостатком описанного устройства является повышенная сложность: элементы, входящие в средства для поддержания усилия прижима, например, устройство дня создания усилия прижима, сопла и регулируемые вентили, пневмоцилиндры, требуют точного изготовления, сложны по конструкции; для обеспечения требуемой точности- силы прижима необходима надежная герметизация элементов пневмосистемы. Совместное применение электропривода нитераскладывающих механизмов и фрикционного валика или бобины с пневматическим njMfводом перемещения мотальной головки и пневматическими средствами создания усилия прижима усложняет конструкцию вследствие необходимости установки компрессора, средств регулирования постоянного давлеш я и воздуховодов. Кроме того, работа устройства пневмопривода сопровождается производственным щумом, ухудшающим условия труда. Целью изобретения является упрощение конструкции. Для достижения этой цели механизм прижима включает подпружинейную каретку, смонтированную в корпусе с возможностью вертикального перемещения от исполнительного элемента системы управления а чувствительный элемент установлен с возможностью взаимодействия . с кареткой и электрически соединен с входным элементом системы управления, при этом каретка соединена с системой управления посредством передачи винт-гайка. Кроме того, в боковых стенках корпуса механизма прижима вьшолнейы вертикальньсе пазы, а каретка имеет выступы, размещенные в пазах корпуса, при этом гайка передачи смонтирована на каретке. Система управления мех(низмом прижима включает преобразователь сигналов, соединенный с чувствительным элементом, эадатчик усилия прихшма, блок сравнения, соединенньп с задатчиком и преобразователем сигналов, и усилитель, вход которого соединен с блоком сравнения, а выход - с испблнительным элементом, при этом последний вьшолнен в виде электродвигателя. На фиг. 1 изображена общая функциональная схема устройства; на фиг. 2 - разрез корпуса механизма прижима. Устройство 1 для намотк нити содержит револьверную головку 2 с дйумя бобинодер жателями 3, мотальную головку 4, расположениую в вертикальных направляющих 5, на которой установлены кулачковый-нитераскладочный механизм 6, нитераскладьгаающий барабан с канавками для нити 7 и приводной фрикционный валик 8. На мотальной голов-. КС 4 закреплен корпус 9 механизма прижима валика в паковке, который включает подпружиненную пружиной 10 каретку 11, соединенную с электродвигателем 12 посредством закрепленной на нем гайки и вгинта 13. В боковых стенках корпуса 9 вьшолнены вертикальные пазы 14, в которых размещены выступы 15, 16 каретки 11, при этом выступ 16 установлен с возможностью взаимодействия с чувствительным элементом 17, размещенным на преобразователе сигналов 18 системы управления механизмом прижима. Данная система включает также блок сравнения 19, соединенный с преобразователем 18, задатчик усили прижима 20, усилитель 21, вход которого соединен с блоком сравнения 19, а выход с электродвигателем 12, являющимся исполнительным эл1гментом системы управления. Для остановки мотальной головки в верхнем крайнем положении установлен конечный выключатель 22. Устройство работает следующим образом. В начале цикла наматывания сигнал с задатчккрм 20 системы управления электродви-. гателем 12 вызьгаает подвод мотальной головки 4 к бобинодержателю 3, установленно на -револьверной головке 2. При этом вес мотальной головки 4 через корпус 8 механизма прижима, пружину 9 приложен к каретке 11. При вращении в соответствующую сторону винта 13 электродвигателем 12 гайка, а вместе с ней пружина и мотальная головка опускаются. После касания нитераскладывающим барабаном 7 и приводным фрикционным валиком 8 бобины 3 часть веса мотальной головки 4 приложена к бобине 3 и наматьтаемой на ней Паковке, а остальная часть веса приложена через пружину 10 к каретке И При дальнейЩем вращении винта 13 и опускании каретки И происходит перераспределение веса мотальной головки между пружи ной 10 и ,кареткой 11 с одной стороны и наматываемой паковкой с другой стороны. При этом происходит изменение величииь сжа тия пружины 9, пропорционального усилию прижима, и изменяется положение каретки 11 относ1|теш но мотальной головки 4. Это перемещение каретки 11 воспринимается преобразователем линейного перемещения 18. Сигнал преобразователя 18 линейного перемещения 11 относительно мотальной головки, пропоршгональный усилию прижима срав1швается в блоке сравнения 19 с сигналом задатчика 20, При равенстве заданного и действительного усилия прижима электродвигатель отключается и мотальная головка за счет самотормозящейся передачи винт-гайка удержиБается в фиксированном положении. При увеличении диаметра паковки в процессе намотки мотальная головка 4 приподнимается. В результате уменьщается величина сжатия фужины 10 и изменяется положение каретки 11 относительно мотальной головки 4; величина усилия прижима при этом возрастает. Сигаал с преобразователя 18 перемещения каретки 11 относительно мотальной головки 4, пропорциональный усилию прижима, становится больше сигнала задатчика 20 усилия прижима. Это приводит к тому, что система управления электродвигателем включает электродвигатель 12 таким образом, что последний вращает винт 13 и поднимает каретку II, при этом увеличивается сжатие пружины 10, что приводит к уменьщению величины усилия прижима. По достижении заданного усилия прижима схема .управления электродвигателем отключает электродвигатель 12. По окончании намотки паковки задатчик 20 подает сигнал на подъем мотальной головки и схема управления включает электродвигатель таким образом, что он вращает винт 13 в направлении подъема каретки И и мотальной головки в требуемое верхнее положение, достигнув которого, схема управления отключает электродвигатель, для чего установлен специальный конечный выключатель или датчик положения 22 в необходимой точке остановки. После остановки в неподвижном состоянии мотальная головка удерживается самотормозящейся передачей винт-гайка. В это время вьщолняется известным образом ем готовой паковки и установка новой оправки на бобинодержатель. 3. Далее повторяется процесс, описаиный выще. /Предлагаемое устройство наиболее целесо.образно использовать в текстильной и химической промыщленноста, в технологических процессах, связанных. с фрикционным наматыванием длинномерных материалов (нитей, жгутов). Упрощение конструкции устройства для намотки нити.состоит в том, что вместо пневматических и гидравлических элементов схемы управления устройством, а также источников сжатого под высоким давлением воздуха шш жидкости применены электромеханические устройства и элементы электропривода, которые проще по конструкции и удобнее при эксплуатации. Формула изобретения
с цепью упрощения конструкции, устройства, механизм прижима включает подпрзокинеиную каретку, смонтированную в корпусе с возможностью вертикального перемещения от исполнительного злемеита системы управления, а чувстви ельиый злемент установлен с возможностью взаимодействия с кареткой и электрически соединен с системой управления.
корпуса механизма прижима вьшолнены вертикальные пазы, а каретка имеет выступы, размещенные в пазах корпуса, при этом гайка передачи смонтирована на каретке.
Источники ииформации, принятые в0.внимание при экспертизе
3,Патент США № 4106710, кл.В 65 Н 54/ 1978 (прототип). фигЛ фиг.2
