(54) РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Вентильный преобразователь,ведомый сетью | 1979 |
|
SU1005252A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Реверсивный вентильный электропривод | 1981 |
|
SU972642A1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Устройство для управления асинхроннымТРЕХфАзНыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813638A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
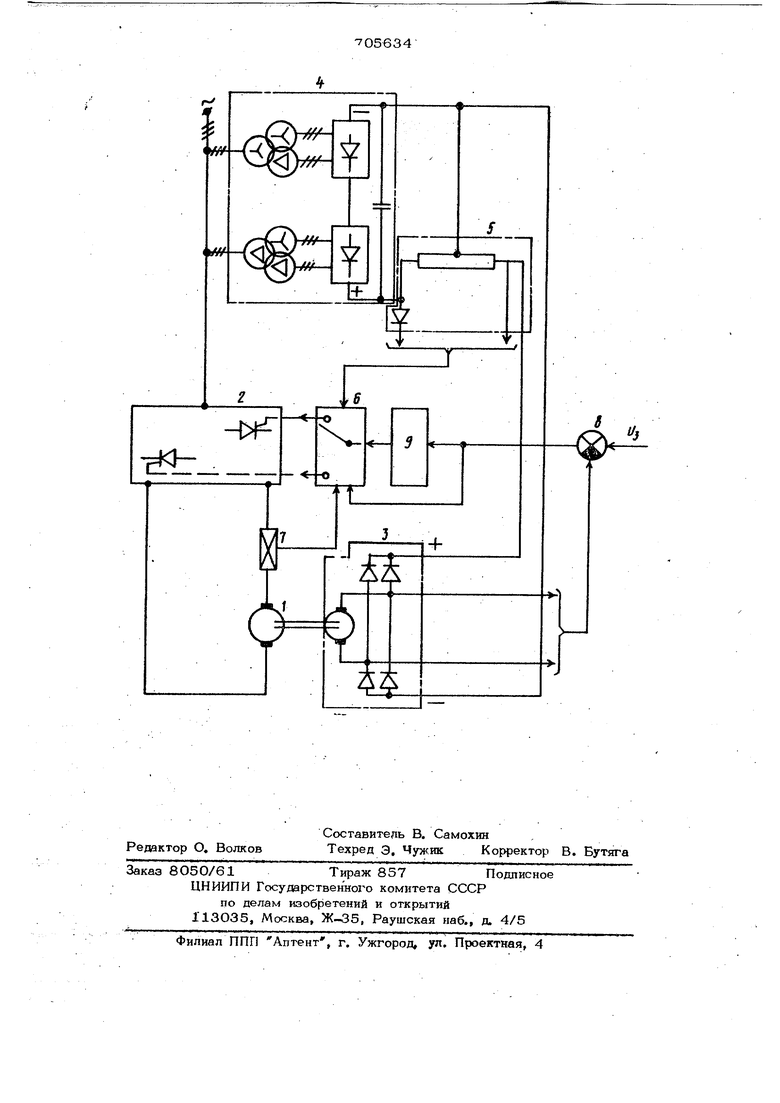
Изобретение относится к реверсивным вентильным электроприводам, содержа.шим двигатель постоянного тока и реверсивный преобразователь с раздельным управлением, либо нереверсивный преобразователь с переключателем в цепи якоря. Известны системы раздельного управления реверсивным преобразователем и системы управления нереверсивным преобразователем с переключателем (реверсором) в цепи- якоря двигателя, содержащие логическое переключающее устройство, разрешающее переключение вентильных групп реверсивного преобразователя (или реверсора в случае нереверсивного преобразователя) при совпаден-ии дву условий: наличия команды на переключениеи отсутствия тока якоря двигателя Cl. Недостатком известных систем реверсивного вентильного привода с раздельным управлением комплектами вентильного преобразователя, либо с переюиоча- телем (реверсором) в цепи якоря является невозможность полного использования преобразователя по выпрямленному напряжению, а значит и по мощности. Наиболее близким к изобретению по технической сущности является реверсив- ный вентильный электропривод, содержащий электродвигатель постоянного токА, подключенный через реверсивный преобразователь и датчик тока двигателя к сети переменного тока, систему импульснофазового управления, соединенную через логическое переключающее устройство с реверсивным преобразователем, источник задающего напряжения, однрпрлярный датчик-, скорости двигателя, выход которого и выход источника задающего напряжения соединены со входом сумматора, соединенного выходом с входом системы импульсно-фазового управления и одним из входов логического переключающего устройства, второй вход которого соединен с выходом датчика тока двигателя L2. Недостатками известного электропривода являются недостаточное использо ванне прёобразоЕйтеля по мощности и недостаточная надежность электропривод в целом при инвертировании в нестабиль ной питающей сети. Целью изобретения является улучше кие исйольаования преобразователя по мощности и повышение надежности. элек гропривода. Это достигается за счет того, что в известный реверсивный вентильный sneiirpo привод 2 дополшггвпьно введены датчик Напряжения питающей сети и узел cjsfiSHeния, выполненный, например, в виде реёистора со бредйей точкой| подключенного к встречно соединенным выходам датчиков напряжения питающей сети и скорости двигателя, И диода, включенног .последовательно в выходную цепь узла сравнения, соединенную с дополнительным входом логического переключающего устройства. Сущность изобретения поясняется чер тежом, на котором изображена схема реверсивного вентильного электропривода Электропривод содержит двигатель 1 постоянного тока, питающийся от вентил ного преобразователя 2, причем преобразователь 2 реверсивный, либо неревер сивный с переключателем полярности (реверсором). С валом двигателя 1 жес ко связан .Рахогенератор, образующий вместе с диодным и вьшрямительным мостом однополярный датчик ЭДС 3. К питающей сети переменного тока подсоединены два маломощных трансформатора, образующих вместе с выпрямителями на выходе датчик 4 напряжен ш с двадцатичеть1рехпульсной схемой выпрямителя. Выхода датчиков 3 и 4 подсоединены на вход узла сравнения 5, выход которого подклгоЧбн к дополнительному входу лоГ11ческого переключающего устройства 6. Два других входа переключаю щего устройства 6 подключены соответственно к датчику тока двигателя 7 и йЬкоду сумма тора 8, К этому же вьпсоду сумматора 8 подключен вход системы 9 импульсно-фазовбго управлений, выход Которой присоединен к третьему Bxojay логического переключающего устройства 6. Выходаые каналы блока 6 связаны с управляющими электродами вентилей пре образователя 2, а входы сумматора 8 с динёны с выходами датчика скорости двигателя 3 и источника задающего на- ; пряжения. Электропривод работает следующим , В состоянии готовности к пуску привода преобразователь 2 подключен к питающей сети сигнал задания скорости 1 равен нулю. Появление сигнала задания скорости на входе сумматора 8 вызыва- ; ет появление напряжения на его выходе. Это напряжение поступает на вход системы 9, вызывая сдвиг отпирающих импульсов от oL П/2 к oL О, т.е. в сторону увеличения выпрямленного напряжения. Одновременно, напряжение с сумматора 8 поступает на один из входов логического переключающего устройства 6. Поскольку toK и ЭДС двигателя еще равны :нулю, что соответствует разрешающим Ьигналам на входах переключающего устройства,, он переключает импульсы с выхода системы 9 на один из комплектов реверсивного преобразователя (выбор комплекта определяется полярностью Uj ) В :случае, если преобразователь нереверсивный, переключающее устройство 6 переключает реверсор, а импульсы с системы 9 поступают непосредственно на управляющие электроды вентилей преобразователя. Приводразгоняется До заданной скорости. При этом на выходе сумматора 8 определяется разностью между сигналом заданной скорости Ц и сигналом, пропорциональным фактической скорости, подаваемым на вход сумматора 8 с тахогенератора.... При уменьшении величины или изменении полярности Uj сигнал на вьхходе суммато ра 8 изменяет свой знак, что соотве-рствует команде на торможение привода. Импульсы в системе 9 сдвигаются в сторону увеличения угла сС т.е. в сторону инвертирования. Одновременно подается сигнал на переключение переключающего устройства 6. Однако для его переключения, кроме сигнала с сумматора 8, необходимо совпадение еще двух условий: ток двигателя должен уменьшиться до нуля (т.е. сигнал с датчика 7 должен стать равен нулю), а сигнал с узла 5 дблгкен быть больше нуля, что возможно только если сигнал с датчика 3 меньше, чем с датчика 4. Коэффициент трансформации трансформаторов датчика 4 выбран таким, что выпрямленное напряжение на его выходе на (1-2)%больше напряжения тахогенератора при нормальной скорости привода, поэтому сигнал с датчика ЭДС может оказаться больше сигнала с датчика напряжения сети лишь при условии снижения напряжения сети после команды на переключение. В этом случае переключение на инверторный режим не произойдет, пока двигатель 1 не снизит свою скорость под действием статического момента и ЭДС двигателя не прин ведет в соответствие с напряжением сет При таком построении системы управ ления угол может выбраться без учета колебаний напряжения, что позволяет увеличить использование преобразо вателя по напряжению (мощности) до 99%. Необходимо отметить, что для четкой . работы узла сравнения 5 датчик напряжения сети должен быть практически безынерционными иметь минимальные пульсации выпрямленного напряжения. Установка фильтра на выходе датчика неизбежно вносит инерционность, поэтом датчик собран по двадцатичетырехпуяьс ной схеме выпрямления, пульсации напряжения в которой-не превышает Г%, . Такой малый уровень пульсаций позволяет без фильтра пульсаций осуществить сравнение напряжения сети и ЭДС двигателя с достаточно высокой точностью, и конденсатор небольшой емкое- ти на выходе датчика служит лишь филь ром коммутационных помех, . Диод в узле сравнения 5 заперт в тех случаях, когда сигнал с датчика. ЭДС больше сигнала с датчика напряжения и отперт в обратном случае, т.е. когда напряжение -сети соответствует (или больше)ЭДС двш ателя и инверт рование безопасно, формула изобрете ни я Реверсивный вентильный электропр вод, содержащий электродвигатель по- стоянного тока, подключенный через реверсивный преобразователь и датчик тока двигателя к сети переменного тока, систему импульсно-фазового управления, соединенную через логическое переключающее устройство с реверсивным преобразователем, источник задающего напряжения, однополярный датчик скорости двигателя, выход которого и выход источника задающего напряжения соединены со входом сумматора, соединенного выходом с входом системы импульснофазового управления и одним из выходов логического переключающего устройства, второй вход которого соединен с выходом датчика-тока двигателя, отличающийся тем, что, с целью улучшения использования преобразователя по мощности и повышения надежности электропривода, в него дополнительно введены датчик напряжения питающей се-, ти и узел сравнения, выполненный, на- прттмерг в виде резистора со средней точкой, подключеннсяго к встречно соединенным выходам датчиков напряжения питающей сети и скорости двигателя, и диода, включенного последовательно в BbixonHyto цепь узла сравнения, соединенную с дополнительным входом логического переключающего устройства. Источники информации, принятые во внимание при экспертизе 1. Барский В. А, Раздельное управление реверсивными тиристорами прео&разователямиу М., Энергия, 1973, с. 32-39. 2. Качан В. Г., Кочубиевский В. М., Шугрин Ва М. Нелинейные системы с тнристорамн, М., Энергия, 1968, с. 24.
