(54) УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ЗАХВАТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1970 |
|
SU334777A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Коробка передач | 1981 |
|
SU953301A1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Электромеханическая передача | 1979 |
|
SU801198A1 |
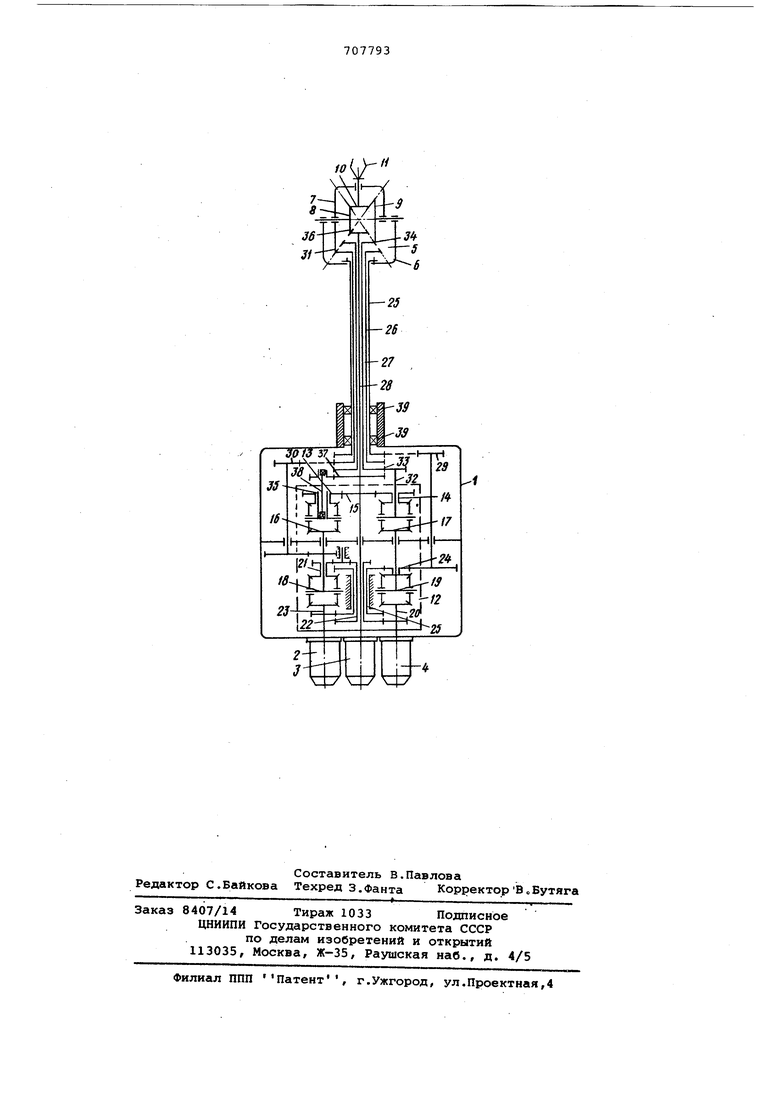
Изобретение относится к области машиностроения, а именно, к манипуляторам с автоматическим управлением предназначенным, например, для автоматических станочных машин. Известно устройство для ориентаци захвата манипулятора,предназначенное для передачи движений с их кинематической развязкой 1. Недостатком указанного устройства ориентациизахвата является недостаточная жесткость вследствие сложной выборки люфтов в кинематической цепи передаточных механизмов. Наиболее близким по технической сущности к изобретению для ориентаци захвата манипулятора, содержащее базовый корпус с установленными на нем приводными двигателями, коничеЬкий дифференциал, сателлит которого жестко соединен с захватом, а его корпус установлен на базовом корпусе с возможностью поворота относительно оси, перпендикулярной оси диф ференциала, и механизм разделения движений с двумя парами дифференциалов/каждый из которых имеет ведущие и ведомое звенья и элементы кинематической связи этих звеньев 2 . Недостаток указанного устройства риентации захвата манипулятора заключается в том, что оно имеет больие габариты и массу при относительно низкой жесткости. Целью изобретгения является сокраение габаритов, массы и увеличение есткости. Указанная цель достигается тем, что в предлагаемом устройстве элементы связи корпуса и основных звеньев конического дифференциала со звеньями механизма разделения движений выполнены в виде концентрических валов, наружный из которых связывает корпус конического дифференциала с первыми ведущими звеньями второй пары дифференциалов , следующий вал связывает водило конического дифференциала с одним из вторых ведущих звеньев первой пары дифферециалов, а два других вала связывают солнечные колеса звеньями первой пары дифференциалов механизма разделения движений. На чертеже изображена кинематическая схема устройства ориентации захвата манипулятора. Механизм ориентации состоит из базового корпуса руки 1 с уставовленными на нем тремя приводными двигателями 2, 3 и 4, конического дифференциала 5, корпус которого б является опорой основных звеньев дифференциала: водила 7 колес 8 и 9. К сателлиту дифференциала 10 жестко прикреплен захват 11. Механизм разделения движений 12 содержит две пар дифференциалов. Ведущие звенья 13 и 14 первой пары дифференциалов связаны между собой и с приводньом двига телем 3 с помощью передачи 15. Вторы ведущие звенья 16 и 17 первой пары /(ифференциалов жестко связаны с соот ветствующими ведомыми звеньями 18 и 19 второй пары дифференциалов. Первые ведущие звенья 20 и 21 второй па ры дифференциалов связаны с приводны двигателем 4, а также между собой с помощью передачи 22, имеющей передаточное отношение, равное- 1. Вторые ведущие звенья 23 и 24 второй пары дифференциалов связаны с приводным двигателем 2 и между собой с помощью вала 25 с передаточным отношением, равным + 1. Связь между корпусом и основными звеньями конического дифференциала 5 и звеньями механизма разделения движений 12 осуществляется с помощью четырех концентрических валов 25, 26 27 и 28. При этом вал 25 связывает корпус 6 конического дифференциала с одним из вторых ведущих звеньев 24 второй пары дифференциалов с помощью двухступенчатой зубчатой передачи 29 Вал 26 связывает водило 7 коничг еског дифференциала с одним из ведомых звеньев 18 второй пары дифференциалов с помощью, например, двухступенчатой зубчатой передачи 30 и коничес кой передачи 31. Вал 27 связывает со нечное колесо 9 конического дифференциала с одним из ведомых звеньев 32 первой пары дифференциалов, с помощью передачи 33 и конической передачи 34. Вал 28 связывает солнечное колесо 8 конического дифференциала со вторым ведомым звеном 35 первой пары дифференциалов с помощью кониче кой передачи 36, 37, и упругого элемента, например торсиона 38. Вал 25 закреплен в базовом корпусе 1 на под шипниках 39 с возможностью вращения В механизме ориентации можно выде лять три независимых замкнутых кинематических цепи, охватывающие все эл менты механизма: а) сателлит 10 - солнечное колесо 8 - передача 36 - вал 28 - передача 37 - торсион 38 - ведомое звено 35 ведущее звено 13 - передача 15 - ведущее звено 14 - ведомое звено 32 - Передача 33 - вал 27 - передача 34 солнечное колесо 9 - сателлит 10; б) водило 7 - передача 31 - вал ,26 - передача 30 - , ведомое звено 18 ведущее звено 21 - передача 22 - ведущее звено 20 - ведомое звено 19 - ведущее звено 17 - ведомое звено 32 передача 33 - вал 27 - передача 34 солнечное колесо 8 - водило 7; в) корпус 6 - вал 35 - передача 29 - ведущее звено 24 вал 25 - ведущее звено 23 - ведомое звено 18 ведущее звено 16 - ведомое звено 35 - торсион 38 - передача 37 - вал 28 передача 36 - солнечное колесо 8 - водило 7 - корпус 6. Параметры передач подобраны таким образом, что круговое передаточное число каждой из этих замкнутых цепей (последовательное произведение передаточных чисел всех передач, входящих в замкнутую цепь), равно + 1. Это позволяет выбрать люфты во всех кинематических цепях механизма путем предварительной закрутки торсиона 38, Работа механизма ориентации осуществляется следующим образом. При работе двигателя 3 (двигатели 2 и 4. заторможены) вращение через передачу 15 передается ведущим звеньям 13 и 14 первой пары дифференциалов, которые вращаются с равными скоростями и в одном направлении. Так как ведущие звенья 16 и 17 заторможены, ведомые звенья 32 и 35, а также концентрические валы 28 и 27 через передачи 33 и 37 получают вращение с равными скоростями и в одном направлении. Солнечные колеса 8 и 9 через конические переда-чи 36 и 34 получают вращение в противоположных направлениях с равными скоростями и приводят во вращение сателлит 10, жестко связанный с захватом 11. Водило 7, связанное через передачу 31 с валом 26, и корпус 6, связанный с валом 25, остаются неподвижными. При работе двигателя 4 (двигатели 2 и 3 заторможены) вращение через передачу 22 передается ведущим звеньям 20 и 21 второй пары дифференциалов со скоростями, равными по величине, но противоположными по направлению. Так как ведущие звенья 23 и 24 второй пары дифференциалов, а также звенья 13 и 14 первой пары дифференциалов заторможены, то ведомые, з.венья 18 и 19, а также звенья 35 и 32 получают вращение со скоростями, равными по величине, но противоположными по направлению. Через передачи 30 и 37 концентрические валы 26, 27 и 28 получают вращение с равными скоростями, причем валы 26 и 28 вращаются в одном направлении, а вал 27 - в противоположном. Вал 25 остается заторможенным, так как он через передачу 29 и вал 25 связан с двигателем 2. Через конические передачи 31, 34 и 36 основные звенья конического дифференциала (7, 8 и 9) получают вращение со скоростями/ рГавными по величине и по направлению, т.е. происходит как бы их блокировка, и захват 11 получает вращение относительно оси конического дифференциала 5 . Kopilyc , б и сателлит 10 остаются неподвижными. При работе двигателя 2 (двигател 3 и 4 заторможены) вращение через вал 25 передается ведущими звеньями 23 к 24 второй пары дифференциалов со скоростями, равными по величине и направлению. Так как ведущие звенья 20 и 21 второй пары дифферен циалов, а также звенья 13 и 14 первой пары дифференциалов заторможены то ведомые звенья 18 и 19, а также звенья 35 и 32 получают вращение со скоростями, равными по величине и по направлению. Через передачи 29 .30, 33 и 37 концентрические валы 25 26, 27 и 28 получают вращение также со скоростями, равными по величине и по направлению, и таким образом ка блокируются между собой. Благо.даря этому захват 11 получает вращение относительно общей оси концентрических валов, в то время как водило 7 и сателлит 10 остаются неподвижными относительно собственных осей. Таким образом, каждый из приво ных двигателей 3, 2 и 4 осуществляет вращение захвата 11 относительно одной из трех особей. В случае одновременной работы двух или трех приводных двигателей захват 11 получает суммарное перемещение относительно двух или трех .осей. Формула изобретения Устройство для ориентации захват манипулятора, содержащее базовый корпус с установленными на нем приводными двигателями, конический дифференциал, сателлит которого жестко соединен с захватом, а его корпус установлен на базовом корпусе с возможностью поворота относительно оси, перпендикулярной оси дифференциала, и механизм разделения движений - с двумя парами дифференциалор, каждый из которых имеет ведущие и ведомое звенья, и элементы кинематической связи этих звеньев, отличающееся тем, что, с целью сокращения габаритов, массы и увеличения жесткости, элементы . связи корпуса и основных звеньев конического дифференциала со звеньями механизма разделения движений выполнены в виде концентрических валов, наружный из которых связывает корпус конического дифференциала с первыми ведущими звеньями второй пары дифференциалов, следующий вал связывает водило конического дифференциала с одним из вторых ведущих звеньев первой пары дифференциалов, а два другиз вала связывают солнечные колеса конического дифференциала с ведущими звеньями первой пары дифференциалов механизма разделения движений. Источники- информации, принятые во внимание при экспертизе 1.Станки и инструменты, 4, 1976, с. 6, рис. 5. 2.Авторское свидетельство СССР 334777, кл, В 25 J 15/02, 1972.
ty
