Известны манипуляторы, выполненные в виде руки с захватом, установленной на основании и снабженной механизмами С1 Щз1кания и размыкания захвата, поворота и качания руки, телескопического удлинения руки и ориентации захвата относительно руки, работающими от следящих приводов с контролем положения от датчиков обратной связи.
Цель изобретения - расширение технологических возможностей манипулятора.
Предложенный манипулятор отличается от известных тем, что его захват может вращаться относительно трех взаимно перпендикулярных осей координат при независимости движений И возможности полного выбора люфтов, поскольку механизм ориентации захвата состоит из конического дифференциала, механизма разделения движений и расположенного между ними цилиндрического дифференциала, причем сателлит конического дифференциала жестко связан с захватом, а его солнечные шестерни пос редством передач связаны с сателлитами цилиндрического дифференциала, соединенного с механизмом разделения движений,
состоящим из двух пар дифференциалов, каждый из которых имеет два ведущих и одно ведомое звено, причем ведомые звенья первой пары посредством передач связаны с солнечными шестернями цилиндрического дифференциала, первые ведутдие звенья первой пары дифференциалов при помощи передач связаны с приводным валом, соединяющим один
0 из следящих приводов ориентации захвата с корпусом конического дифференциала, а вторые ведущие звенья первой пары дифференциалов жестко связаны с ведомыми звеньями второй пары
5 дифференциалов,Ведущие звенья кото рых посредством передач попарно связаны между собой и с двумя другими следящими приводамиориентации захва. та.
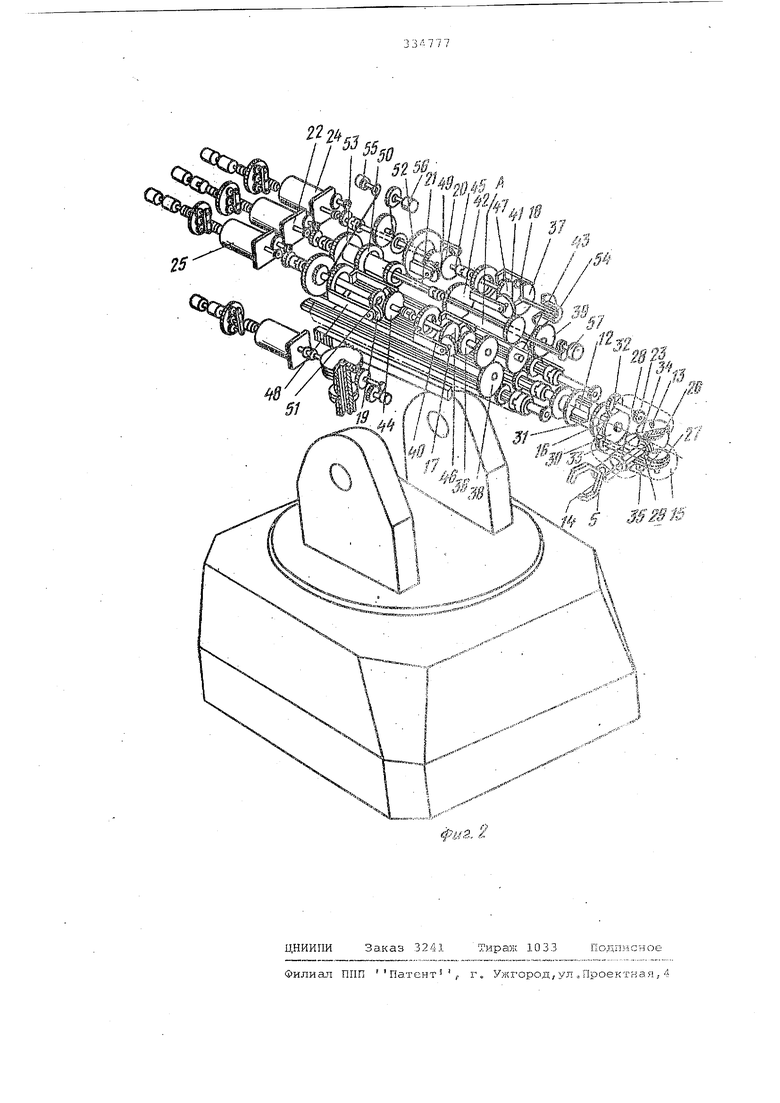
0 На фиг. 1 изображен предложенный манипулятор, общий вид; на фкг.2 - кинематическая схема механизма ориентации захвата.
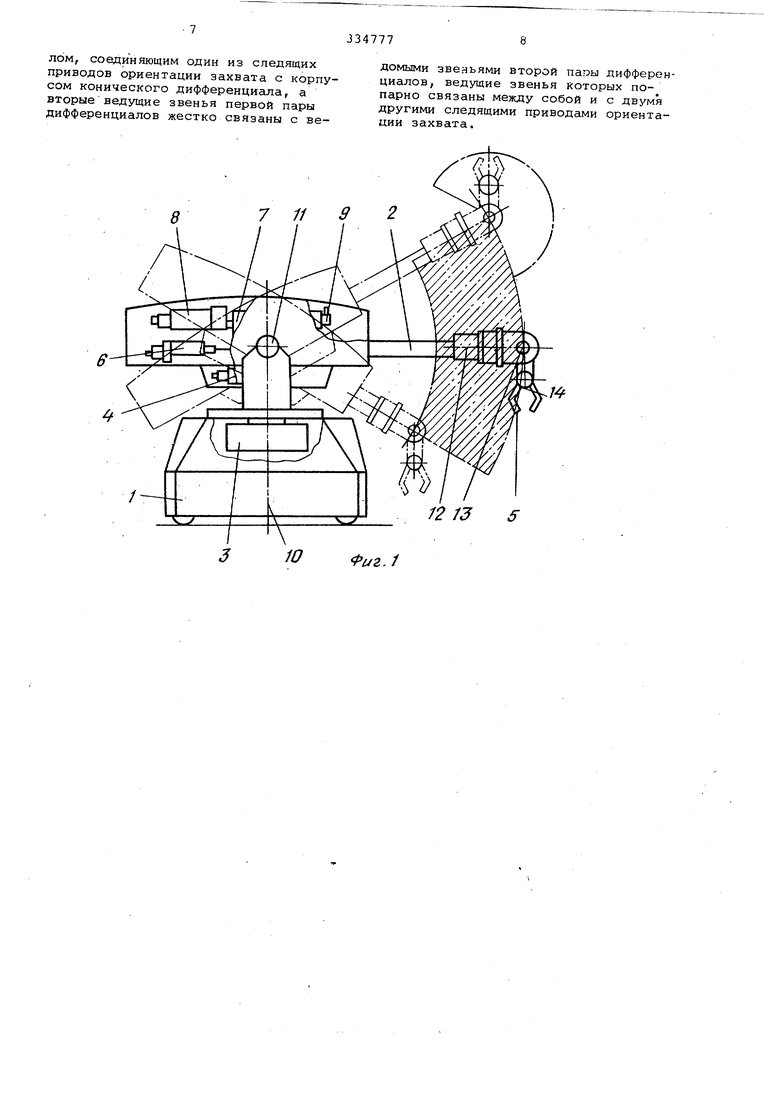
Манипулятор (см.фиг.1) состоит
5. из основания 1 и подвижной относительно основания руки 2. В основании расположен механизм 3 поворота и качания руки. Рука снабжена механизмом 4 телескопического удлинения
приводится в действие механизмом 6 смыкания и размыкания захвата.Зах ват 5 ориентируется относительно руки с помощью механизма 7 ориентации захвата. Все упомянутые механизмы работают от следящих приводов 8 с ко.нтролем положения от датчиков 9 обратной связи. Манипулятор имеет шест степеней свободы: вращение руки относительно вертикальной оси 10, качание руки относительно горизонтальной оси 11, телескопическое удлинение руки; вращение захвата относительно оси 12; качание захвата относительно оси 13, вращение захвата относительно оси 14, Перемещение по каждой из этих степеней свободы осуществляется с помощью приводов 8, При этом первые три степени выводят захватВ любую заданную точку рабочей Зоны, а три последние ориентируют захват заданным образом в выбранной точке рабочей зоны. Механизм 7 ориентации захвата ориентирует захват 5 относительно трех взаимно перпендикулярных осей 12-14 (см.фиг.2) и состоит из конического дифференциала 15, механизма разделения движения А и расположенного между ними цилиндрического дифференциала 16.
Механизм разделения движения А состоит из двух пар дифференциалов, первой пары дифференциалов 17 и 18 и второй пары - 19 и 20. Каждый из дифференциалов имеет два ведущих и одно ведомое звено. Привод ной вал 21 связывает следящий привод 22 поворота захвата относительно оси 12 с корпусом 23 конического дифференциала. Вращение захвата относительно оси 14 осз.ществляется приводом 24 , а качание захвата относительно оси 13 приводом 25, Конический дифференциал 15 состоит из двух солнечных конических шестерен 26 и 27, водила 28 и сателлита 29, жестко связанного с захватом 5. Цилиндрический дифференциал 16 состоит из двух солнечных шестерен 30 и 31 и сателлитов 32 и 33. Водилом цилиндрического дифференциала является корпус 23..
Сателлиты 32 и 33 при помощи передач 34 и 35 связаны с солнечными шестернйми 26 ,и 27 конического дифференци ла. Ведомые звенья 36 и 37 дифференциалов 17 и 18 при помощи передач 38 и 39 связаны с солнечными шестернями 30 и 31 цилиндрического дифференциала 16. Первые ведущие звенья 40 и 41 первой пары дифференциалов 17 и 18 посредством передачи 42 (43) связаны между собой и с приводным валом 21, связанным при передачи 42 с корпусом 23. Ведомые звенья 44 и.45 второй пары дифференциалов 19 и 20 жестко связан со вторыми ведущими звеньями 46 и 47
первой пары дифференциалов 17 и 18. Ведущие звенья 48 и 49 второй пары дифференциалов 19 и 20 связаны при помощи передачи 50 между собой и с выходным валом 24 привода таким образом, что звенья 48 и 49 при работе привода 24 получают вращения в противоположных направлениях. Ведущие звенья 51 и 52 второй пары дифференциалов 19 и 20 посредством передачи
Q 53 связаны между собой и с выходным валом привода 25 таким образом, что при работе привода 25 звенья 51 и 52 получают вращение в одном направлении.
- В кинематической схеме (см.фиг.2) механизма ориентации захвата имеются три замкнутые кинематические цепи,, охватывающих все элементы механизма, Имеющийся.в механизме упругий элемент, например вал-торсион 54, пере0 Дает момент предварительной закрутки по Т1эем кинематическим цепям и тем самым осуществляет выбор люфтов в этих цепях:
а) торсион 54 - передача 39,
5 связанная с солнечной шестерней 31,- сателлит 33 - передача 35 - солнечная шестерня 27 - сателлит 29 - солнечная шестерня 26, связанная с передачей 34, солнечная шестерня
Q 30 - передача 38 - ведомое звено 36 ведущее звено 40 - передача 42 - ведущее звено 41 - ведомое звено 37 торсион 54;
б) торсион 54 - передача 39 ведомое звено 36 - ведущее звено
46 - ведомое звено 44 - ведущее звено 48 - передача 50 - ведущее звено 49 - ведомое звено 45 - ведущее звено 47 ведомое звено 37 - торсион 54;.
в) торсион 54 - передача 39 -
ведомое звено 36 - ведущее звено 46 ведомое звено 44 - ведущее звено 51 передача 53 - ведущее звено 52 - ведомое звено 45 - ведущее звено 47 -
5 ведомое звено 37 - торсион 54.
Таким образом происходит полный выбор люфтов во всех звеньях меха- низМа ориентации захвата относительно трех взаимно перпендикулярных
0 осей координат (выб.Докового зазора зубчатых передач7 выбор люфтов в подшипниковых сателлитах, выбор люфтов- во всех шлоночных и шлицевых соединениях), Благодаря этому датчики 55-57 обратной связи могут быть присоединены в лгобом удобном по конструктивным соображениям месте. При этом исключается влияние кинематических передач на точность повторения показаний датчиков в автоматическом цикле работы. Механизм ориентации захвата относительно трех взаимно перпендикулярных осей координат может работать как от раздельно, так и от одновременно работающих
тающие приводы должны находиться в заторможенном состоянии.
При работе привода 22 приводы
24и 25 заторможены. Вращение от привода 22 через приводной вал 21
и передачу 43 передается корпусу 23 конического дифференциала. Одновременно через передачу 42 вращение передается ведущим звеньям 4.0 и 41 дифференциалов 17 и 18. При этом звенья 40 и 41 получают вращение в одном направлении, Ведовлые звенья 36 и 37 также вращаются в одном направ.лении, но с удвоенной скоростью. Через передачи 38 и 39 вращение передается солнечным шестерням 30 и 31 цилиндрического дифференциала 16, пр этом шестерни 30 и 31 и корпус 23 конического дифференциала вращаются в одном направлении с одинаковой скоростью, т.е. цилиндрический дифферен циал 16 оказывается заблркированным и вращается как одно целое. Поэтому захват 5 вращается только относительно оси 12, а вращение OTHOCHTejjbHO осей 13 и 14 отсутствует.
При работе привода 25 приводы 22 и 24 заторможены. Вращение от привод
25передается ведущему звену 51 дифференциала 19 и через передачу 53 - ведущему звену 52 дифференциала 20. При этом звенья 51 и 52 получают вращения в одинаковом направлении. Поскольку ведущие звенья 48 и 49 заторможены, ведомые звенья 44 и 45,
а также жестко связанные с ними ведущие звенья 46 и 47 получают вреидения в разных направлениях с одинаковой скоростью. Поскольку ведущие звенья 40- и 41 дифференциалов 17 и 18 заторможены приводом 22, ведомые звенья 36 к 37 получают вращения в разньох направлениях с одинаковой скоростью. Через передачи 38 и 39 вращение передается солнечным шестерням 30 и 31, а через них - к сателлитам 32 и 33 цилиндрического дифференциала 16. Поскольку корпус 23 при помощи передачи 43 и вала 21 заторможен, сател литы 32 и 33 получают вращение в раз ных направлениях с одинаковой скоростью. Через передачи 34 и 35,вращение передается солнечным шестерням
26и 27 конического дифференциала 15 в одном направлении и с равными скоростями. Таким образом исходный дифференциал оказывается заблокированным и вращается как одно целое относительно оси 13. Вращение захвата 5 относительно оси 14 при этом отсутствует ввиду отсутствия вргидени Сателлита 29.
При работе привода 24 приводы 2Х и 25 заторможены. Вращение от привода 24 передается ведущему звену 49 дифференциала 20 и через передачу 50 - водилу 28 дифференциала 19.
При этом звенья 48 и 49 получают вра щение в разных направлениях:, а ведомые звенья 44 и 45 дифференциалов 19 и 20 получают вращение в одинако™ вом направлении с равной скоростью, 5 так же как и ведущие звенья 46 и 47 дифференциалов 17 и IB, Поскольку звенья 40 и 41 заторможены приводом 22, то ведомые звенья 36 и 37 получают вращение также в одном направлеG НИИ с одинаковой скоростью. Через передачи 38 и 39 вращение передается солнечным шестерням 3D и 31, а через них - сателлитам 32 vi 33 цилиндрического дифференциала 16,, которые
е также получают вращение в одном направлении с одинаковой скоростью. Через пере,дачи 34 и 35 вращение пе™ редается солнечным шестерням 26 и
27исходного конического дифференциала 15. При этом солнечные шестерни
26 и 27 вршцаются в разных направлениях с одинаковой скоростью. Водило
28исходного конического дифференциала остается неподвижньФ1, а сателлит
29вращается вместе с захватом 5
5 относительно оси 14. Таким образом,
каждый из приводов 22, 25 и 24 управляет только одним движеняем захвата В случае одновремекно - работы двух или всех приводов захват 5 получает суммарное движение относительно двух или трех осей координат.
Формула изобретения
Манипулятор, предназначенный для работы в автоматическом цикле, на основании которого устаноБлены подвижная рука с . захватом, приводимым в действие механизмом смыкания и размыкания, мехакизкы поворота и качания руки, ее телескопического удлинения, ориентации захвата относительно руки и слех(ящне приводы с контролем положения от обратной связи, о т л и ч а Ю Ц и Йс я тем, что,, с целью ра.сширени }, технологических зозможностей, механизм ориентации захвата выполнен.. в виде конического дифференциала,сое0диненного с механизмом разделения движений посредством цилиндрического дифферендис.па, причем сателлит конического дифференциала жестко связан с захватом, а его солнечные ше стерни связаны с сателлитом ци.пиндри ческого дифференциала, соединенного с механизмом разделек.ия двидшний, состоящим из двух пар дифференциалов,, каждый из которых имеет два ведущих
0 и одно ведомое звенья, причем ведо ыe звенья первой пары дифференциалов связаны с со.лнечньми шест.еркями цилиндрического дифференциала, первые ведущие звенья первой пары диф-лом, соединяющим один из следящих приводов ориентации захвата с корпусом конического дифференциала, а вторые ведущие звенья первой пары дифференциалов жестко связаны с ведомыми звеньями второй патзы дифференциалов, ведущие звенья которых попарно связаны между собой и с двумя другими следящими приводами ориентации захвата.
/2 /J 5
Риг. / 22 24,
ФМ2. 2 Чг 9giji,5 /1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2153424C2 |
| Планетарный распределитель момента | 1978 |
|
SU861800A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2093374C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2153425C2 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2142885C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2149769C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2136512C1 |