Изобретение относится к манипуля торам и может быть использовано в различных областях техники. Известен шарнир манипулятора, со держащий два конических дифференциа ла с общей осью солнечных колес и взаимно сблокированными водилами. При повороте ведомого рь1Чага относительно опорного происходит обкаты вание цилиндрических колес без их поворота вокруг своих осей, что гарантирует отсутствие паразитного вращения приводных валов на ведомом рычаге, а следовательно, и независимость их движений от поворота С Недостатками известного устройст ва являются сложность конструктив ного решения и низкая технологичнос изготовления деталей модуля большо количество промежуточных колес, сло ность, изготовления блоков колес и т.д./; необходимость в индивидуальном двигателе и редукторе для каждо го из перемещений для обе.спечения независимостинаправления вращений малая жесткость из-за неизбежных зазоров в передачах и узлах сопряжения; ограниченные технологические возможности; значительные габариты из-за наличия двух осей в шарнире отсутствие механической блокировки от самопроизвольного перемещения звеньев при отключенных двигателях или неисправных тормозах. Цель изобретения - повышение надежности работы и расширение технологических возможностей манипулятора. Для достижения поставленной цели в шарнире манипулятора, содержащем двигатель два конических дифференциала с общей осью солнечных колес и взаимно сблокированньюли водиЛами, каждый дифференциал снабжен паразитными колесами и механизмами их расцепления, .причем паразитные колеса установлены на водилах дифференциалов под углом 45 к оси шарнира с возможностью перемещения вдоль своих осей, а солнеч-ные колеса дифференциалов сблокирО1заны между собой... Кроме того, DiapHHp манипулятора снабжен вторым двигателем и третьим коническим дифференциалом, водило которого сблокировано с водилами двух других дифференциалов, причем второй двигатель расположен.на этом водила. - На фиг. 1 изображен основной шар нир манипулятора,- на фиг. 2 - манипулятор с шарниром из трех дифференциалов; на фиг. 3 - то же, с дву мя двигателями; на фиг..4 - то же, с одним двигателем и двумя шарнирами. Шарнир состоит из оси 1 шарнира, соединяющей опорный 2 и ведомый 3 рычаги, которые связаны с водиламк 4 и 5 первого дифференциала.На оси 1 шарнира установлен блок солнечных колес б первого дифференциала, кинематически связанный с ведущим 7 и ведомым 8 сателлитами через паразитные колеса 9-12, установленные на водилах 4 и 5 под углом 45 и управляемые электромагнитами 13 - 16, Соосно с блоком солнечных колес б установлен блок солнечных колес 17 второго дифференциала, детали которого - водила 18 и 19, сателлиты 20 и 21, паразитные колеса 22 - 25 к электромагниты 26 29 аналогичны по конструкции и соосшд деталям первого дифференциала. Водила 4и1В, 5и19 сблокированы концентричными валами 30, 31 и 32,33, которые имеют элементы 34 и 35 стыковки с двигателем и другими исполнительными или передаточными звеньями манипулятора. Шарнир работает следующим. Образом, В исходном состоянии {фиг. i) оба дифференциала заблокированы паразитными колесами, поэтому независимо от состояния двигателя (не показан ) исполнительные звенья манипулятора находятся в состояний покоя и внешние усилия не могут вывести их из него. Для поворота водила 5 и 19 вокруг оси 1 необходимо вывести из зацепления соосные паразитные колеса 9 и 22 или 12 и 25 обоих дифференциалов, установленные на водилах 4 и 18, что достигается включением соответствукяцих электромагнитов 13 и 26 или 16 и 29, Сцепление с валом двигателя осуществляется элементом 34 стыковки, которым 1«эжет быть электромагнитная муфта порошкового типа. Выборка люфтов происходит автоматически за счет разности скоростей .( пробуксовки )в муфтах сцепления с валами 30 и 31, а следовательно, и скоростей водил 5 и 19. Зазоры в кинематической цепи выбираются за счет встречного вращения паразитных колес, так как солнечные колеса сблокированы. При повороте водил 5 и 19 ведомые сателлиты 8 и 21 и выходные валы 32 и 33 остаются неподвижными, так как они заблокированы паразитными колесами 10, 11 и 23,24. Для передачи вращения ведомому сателлиту 8 и валу 32 электромагнитами 13 и 14 выводятся из зацепления Паразитные колеса 9 и 10, Аналогично действуют элементы второго дифференциала. Таким образом, шарнир работает от двигателя одностороннего вращения, а все необходимые направления выходнь1х перемещений достигаются
включением и выключением паразитных колес дифференциалов.
На фиг. 2 изображен модульный манипулятор, именяций один двигатель и один шарнир, в который в отличие от шарнира на фиг, 1 введен третий дифференциал, состоящий из солнечных колес 36, жестко связанных с плечами опорной вилки 37, водила 38, на котором установлены паразитные колеса 39 и ведущий сателлит 40, связанный с валом 41 двигателя электромагнитной муфтой. Вал двигателя соединяет водило 38 с водил ами основных дифференциалов-4 и 18 (фиг. 1). Ведомый сателлит первого дифференциала жестко связан с трубчатым Всшом 42, установленным на подшипниках на водиле. Ведомый сателлит второго дифференциала связан передачей винт - гайка со вторым трубчатым рычагом 43, вставленным в вал 42. Гайка снабжена штифтом 44, входящим в продольный паз рычага 43. На рычаге 43 закреплен схват 45.
Манийулятор имеет четыре степени подвижности: качание (1 и II) вокруг взаимно перпендикулярных осей, ротсщию руки (III) и удлинение руки (IV).
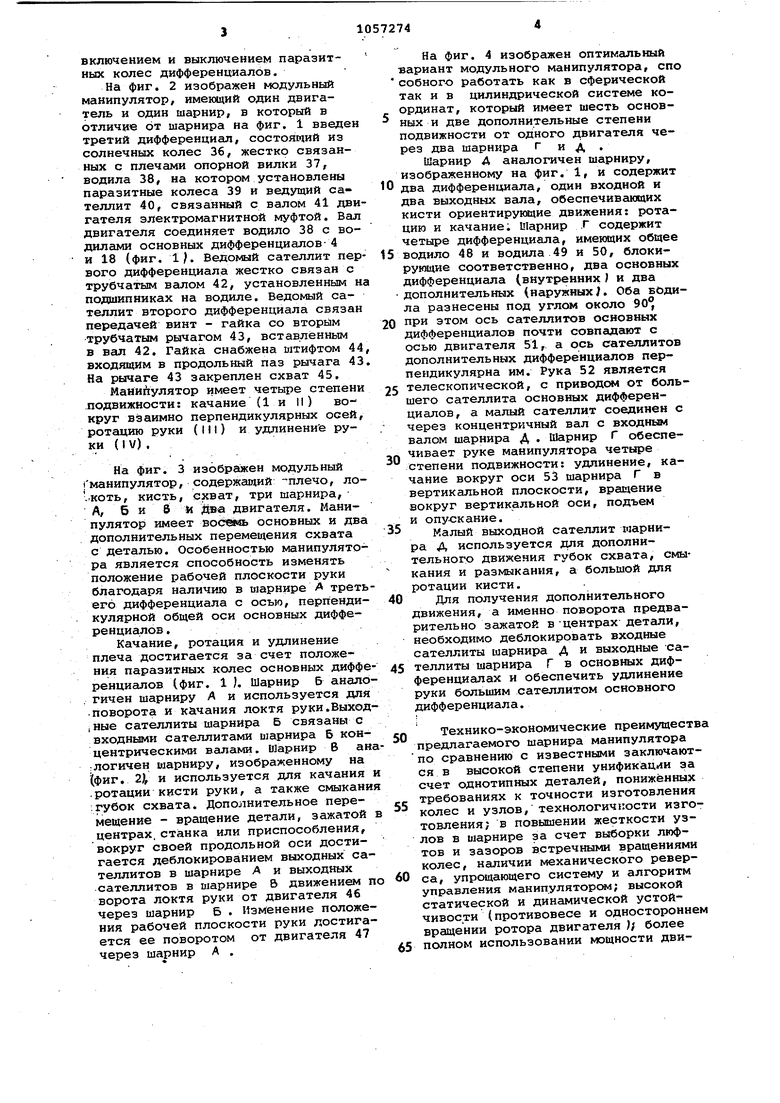
На фиг. 3 изображен модульный манипулятор, содержащий -плечо, логкоть, кисть, схват, три шарнира, А, 5 и 8 и ива двигателя. Манипулятор имеет восемь основных и два дополнительных перемещения схвата с деталью. Особенностью манипулятора является способность изменять положение рабочей плоскости руки благодаря наличию в шарнире X третьего дифференциала с осью, перпендикулярной общей оси основных дифференциалов .
Качание, ротация и удлинение плеча достигается за счет положения паразитных колес основных дифференциалов Ч фиг. 1 ). Шарнир б аналогичен шарниру А и используется для поворота и качания локтя руки.Выходные сателлиты шарнира Б связаны с входными сателлитами шарнира Б концентрическими валами. Шарнир В аналогичен шарниру, изображенному на фиг. 2), и используется для качания и ротации кисти руки, а также смыкания губок схвата. Дополнительное перемещение - вращение детали, зажатой в центрах, станка или приспособления, вокруг своей продольной оси достигается деблокированием выходных сателлитов в шарнире А и выходных сателлитов в шарнире В движением по ворота локтя руки от двигателя 46 через шарнир Б . Изменение положения рабочей плоскости руки достигается ее поворотом от двигателя 47 через шарнир А .
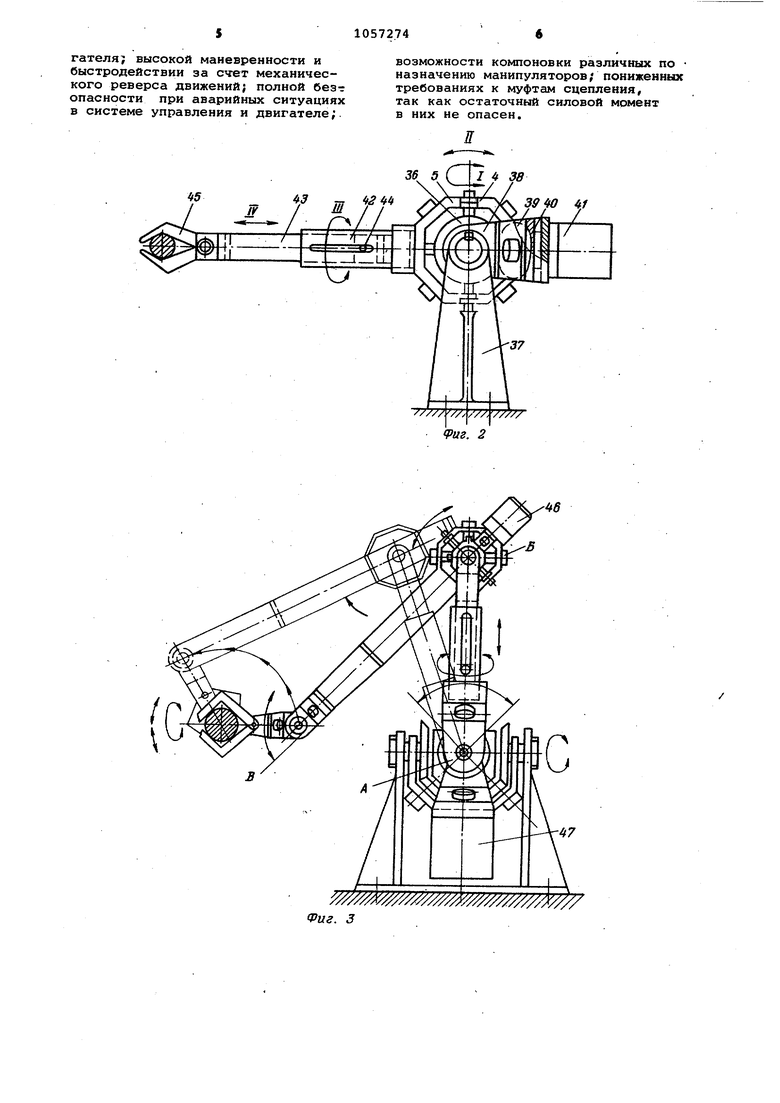
На фиг. 4 изображен оптимальный вариант модульного манипулятора, спо собного работать как в сферической так и в цилиндрической системе координат, который имеет шесть основных и две дополнительные степени подвижности от одного двигателя через два шарнира г ид.
Шарнир А аналогичен шарниру, изображенному на фиг. 1, и содержит
0 два дифференциала, один входной и два выходных вала, обеспечивающих кисти ориентируквдие движения: ротацию и качание; Шарнир Г содержит четыре дифференциала, имеющих общее
5 водило 48 и водила 49 и 50, блокирукидие соответственно, два основных дифференциала (внутренних ) и два дополнительных (наружных К Оба водила разнесены под углом около 90 при этом ось сателлитов основных
0 дифференциалов почти совпадают с осью двигателя 51, а ось сателлитов дополнительных дифференциалов перпендикулярна им. Рука 52 является телескопической, с приводом от боль5шего сателлита основных дифференциалов, а малый сателлит соединен с через концентричный вал с входным валом шарнира Д . Шарнир Г обеспечивает руке манипулятора четыре
0 степени подвижности: удлинение, качание вокруг оси 53 шарнира Г в вертикальной плоскости, вращение вокруг вертикальной оси, подъем и опускание.
5
Малый выходной сателлит марнира Д используется для дополнительного движения губок схвата, смыкания и размыканУ1я, а большой для ротации кисти.
0
Для получения дополнительного движения, а именно поворота предварительно зажатой в-центрах детали, необходимо деблокировать входные сателлиты шарнира Д и выходные сателлиты шарнира Г в основных диф5ференциалах и обеспечить удлинение руки большим сателлитом основного дифференциала.
Технико-экономические преимущества предлагаемого шарнира манипулятора по сравнению с известными заключаются в высокой степени унификации за счет однотипных деталей, пониженных требованиях к точности изготовления колес и узлов, технологичности изготовления; в повышении жесткости узлов в шарнире за счет выборки люфтов и зазоров встречными вращениями колес, наличии механического реверса, упрощающего систему и алгоритм управления манипуляторе ; высокой статической и динамической устойчивости (противовесе и одностороннем вращении ротора двигателя ); более
полном использовании мощности двигателя; высокой маневренности и быстродействии за счет механического реверса движений; полной безт опасности при аварийных ситуациях в системе управления и двигателе;.
возможности компоновки различных по назначению манипуляторов; пониженных требованиях к муфтам сцепления, так как остаточный силовой момент в них не опасен.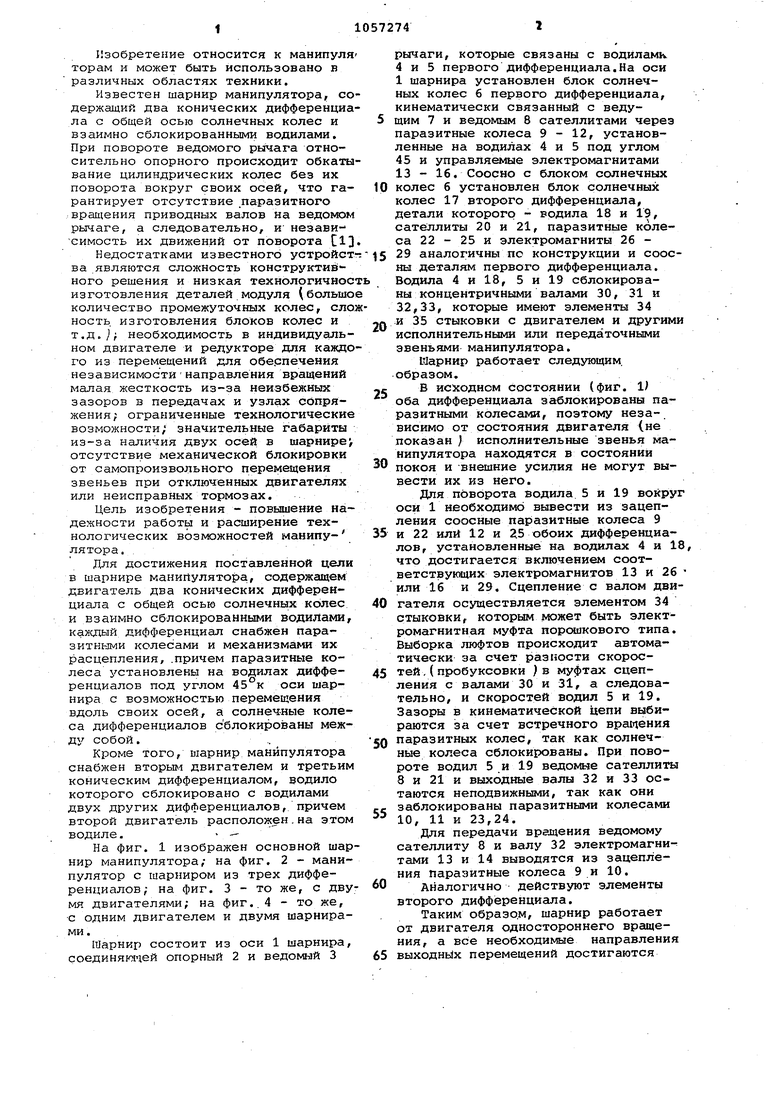
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1970 |
|
SU334777A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| ДИФФЕРЕНЦИАЛ БЛОКИРУЕМЫЙ | 2008 |
|
RU2407933C2 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
1. ШАРНИР МАНИПУЛЯТОРА,содержащий двигатель, два конических дифференциала с общей осью солнечных колес и взаимно сблокированнылш водилами, отличающийг с я тем, что, -с целью повышения надежности, каждый дифференциал снабжен паразитными колесами и механизмами их расцепления, причем паразитные колеса установлены на водилах дифференциалов под углом 45 к оси шарнира с возможностью перемещения вдоль своих осей, а солнечные колеса дифференциалов сблокированы между собой. 2. Шарнир по п. 1, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен вторым двигателем и третьим коническим дифференциалом, водилр которого сблокировано с водилами двух других дифференциалов, причем второй двигатель расположен на этом, водиле. 13 34 22 17 сд М 10 Н |
(Риг. 3
«5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шарнирное соединение звеньев манипулятора | 1968 |
|
SU293432A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
