(54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Дифференциал транспортного средства | 1986 |
|
SU1361038A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Шарнир манипулятора | 1989 |
|
SU1678607A1 |
| Манипулятор | 1970 |
|
SU334777A1 |
| Манипулятор для буровых машин | 1982 |
|
SU1086151A2 |
| ДИФФЕРЕНЦИАЛ БЛОКИРУЕМЫЙ | 2008 |
|
RU2407933C2 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
| Манипулятор | 1979 |
|
SU831615A1 |


1
Изобретение относится к машиностроению и может быть использовано в работах и робототехнических системах.
Известен манипулятор, содержащий основание, механическую руку с шарнирно сочлененными звеньями и дифференциалами 1.5
Недостатком известного устройства является небольшая грузоподъемность из-за высокой инерционности двигателей, установленных на подвижных элементах руки.
Цель изобретения - увеличение грузо- ,Q подъемности.
Эта цель достигается благодаря тому, что манипулятор снабжен дополнительными коническими передачами, волновыми переда чами, управляющими двигателями и приводным двигателем, причем одно солнечное is колесо дифференциала каждого предыдуще го звена через сателлит и водило кинематически связано с солнечным колесом дифференциала каждого последующего звена, второе солнечное колесо дифференциала кинематически связано с дополнительной 20 конической передачей этого шарнира, гибкие колеса волновых передач находятся в зацеплении с колесами дополнительной конической передачи, управляющие двигатели встроены в щарниры и их валы кинематически связаны с генераторами волновых передач, а приводной двигатель установлен в основании манипулятора и его вал кинематически связан с солнечным колесом первого дифференциала, кроме того, сателлит каждого дифференциала выполнен в виде втулки с внутренним и внещним зубчатыми венцами, входящими в зацепление с внутренним и внешним солнечными колесами.
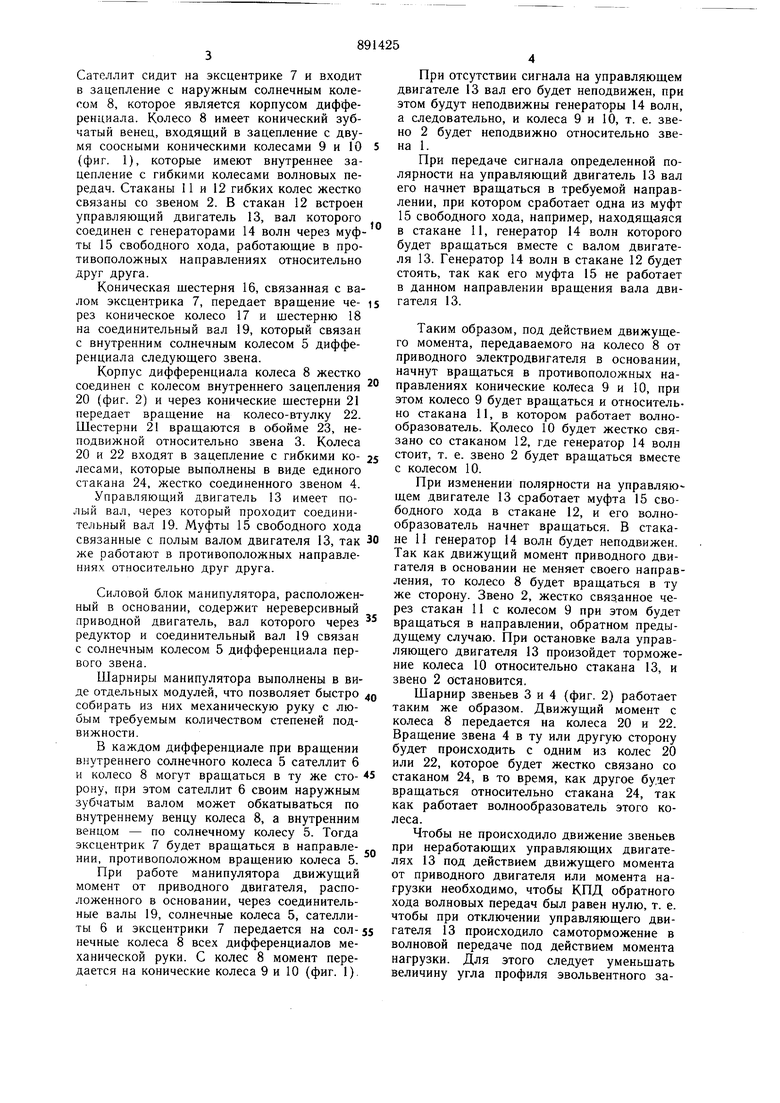
На фиг. 1 изображено устройство шарниров механической руки манипулятора для случая, когда геометрические оси звеньев руки перпендикулярны оси вращения шарнира; на фиг. 2 - то же, для случая, когда геометрические оси звеньев руки совпадают с осью вращения шарнира.
Манипулятор содержит механическую руку со звеньями 1-4, причем каждое звено имеет дифференциал.
Дифференциал каждого звена манипулятора состоит из внутреннего солнечного колеса 5, которое входит р зацепление с сателлитом 6, выполненным в виде втулки с наружным и внутренним зубчатыми венцами. Сателлит сидит на эксцентрике 7 и входит в зацепление с наружным солнечным колесом 8, которое является корпусом дифференциала. Колесо 8 имеет конический зубчатый венец, входящий в зацецление с двумя соосными коническими колесами 9 и 10 (фиг. 1), которые имеют внутреннее зацепление с гибкими колесами волновых передач. Стаканы 1 и 12 гибких колес жестко связаны со звеном 2. В стакан 12 встроен управляющий двигатель 13, вал которого соединен с генераторами 14 волн через муфты 15 свободного хода, работающие в противоположных направлениях относительно друг друга. Коническая шестерня 16, связанная с валом эксцентрика 7, передает вращение через коническое колесо 17 и щестерню 18 на соединительный вал 19, который связан с внутренним солнечным колесом 5 дифференциала следующего звена. Корпус дифференциала колеса 8 жестко соединен с колесом внутреннего зацепления 20 (фиг. 2) и через конические щестерни 21 передает вращение на колесо-втулку 22. Шестерни 21 вращаются в обойме 23, неподвижной относительно звена 3. Колеса 20 и 22 входят в зацепление с гибкими колесами, которые выполнены в виде единого стакана 24, жестко соединенного звеном 4. Управляющий двигатель 13 имеет полый вал, через который проходит соединительный вал 19. Муфты 15 свободного хода связанные с полым валом двигателя 13, так же работают в противоположных направлениях относительно друг друга. Силовой блок манипулятора, расположенный в основании, содержит нереверсивный приводной двигатель, вал которого через редуктор и соединительный вал 19 связан с солнечным колесом 5 дифференциала первого звена. Шарниры манипулятора выполнены в виде отдельных модулей, что позволяет быстро собирать из них механическую руку с любым требуемым количеством степеней подвижности. В каждом дифференциале при вращении внутреннего солнечного колеса 5 сателлит б и колесо 8 могут вращаться в ту же сторону, при этом сателлит 6 своим наружным зубчатым валом может обкатываться по внутреннему венцу колеса 8, а внутренним венцом - по солнечному колесу 5. Тогда эксцентрик 7 будет вращаться в направлении, противоположном вращению колеса 5. При работе манипулятора движущий момент от приводного двигателя, расположенного в основании, через соединительные валы 19, солнечные колеса 5, сателлиты 6 и эксцентрики 7 передается на солнечные колеса 8 всех дифференциалов механической руки. С колес 8 момент передается на конические колеса 9 и 10 (фиг. 1). При отсутствии сигнала на управляющем двигателе 13 вал его будет неподвижен, при этом будут неподвижны генераторы 14 волн, а следовательно, и колеса 9 и 10, т. е. звено 2 будет неподвижно относительно звена 1. При передаче сигнала определенной полярности на управляющий двигатель 13 вал его начнет вращаться в требуемой направлении, при котором сработает одна из муфт 15 свободного хода, например, находящ-аяся в стакане 11, генератор 14 волн которого будет вращаться вместе с валом двигателя 13. Генератор 14 волн в стакане 12 будет стоять, так как его муфта 15 не работает Б данном направлении вращения вала двигателя 13. Таким образом, под действием движущего момента, передаваемого на колесо 8 от приводного электродвигателя в основании, начнут вращаться в противоположных направлениях конические колеса 9 и 10, при этом колесо 9 будет вращаться и относительно стакана 11, в котором работает волнообразователь. Колесо 10 будет жестко связано со стаканом 12, где генератор 14 волн стоит, т. е. звено 2 будет вращаться вместе с колесом 10. При изменении полярности на управляю щем двигателе 13 сработает муфта 15 свободного хода в стакане 12, и его волнообразователь начнет вращаться. В стакане 11 генератор 14 волн будет неподвижен. Так как движущий момент приводного двигателя в основании не меняет своего направления, то колесо 8 будет вращаться в ту же сторону. Звено 2, жестко связанное через стакан 11 с колесом 9 при этом будет вращаться в направлении, обратном предыдущему случаю. При остановке вала управляющего двигателя 13 произойдет торможение колеса 10 относительно стакана 13, и звено 2 остановится. Шарнир звеньев 3 и 4 (фиг. 2) работает таким же образом. Движущий момент с колеса 8 передается на колеса 20 и 22. Вращение звена 4 в ту или другую сторону будет происходить с одним из колес 20 или 22, которое будет жестко связано со стаканом 24, в то время, как другое будет вращаться относительно стакана 24, так как работает волнообразователь этого колеса. Чтобы не происходило движение звеньев при неработающих управляющих двигателях 13 под действием движущего момента от приводного двигателя или момента нагрузки необходимо, чтобы КПД обратного хода волновых передач был равен нулю, т. е. чтобы при отключении управляющего двигателя 13 происходило самоторможение в волновой передаче под действием момента нагрузки. Для этого следует уменьщать величину угла профиля эвольвентного зацепления гибких и жестких колес, а также увеличивать коэффициент трения в зацеплении. Возможности данного способа ограничены возникновением интерференции зубьев. При другом сцособе исключения обратного хода в стакан каждой волновой передачи помещен управляющий двигатель, вал которого через ходовую резьбу связан с диском, имеющим шлицевое соединение с генератором волн. Второй диск внутри волновой передачи неподвижен относительно стакана. Тогда при остановке вала управляющего двигателя первый диск, накручиваясь на него под действием движущего момента, соприкасается со вторым диском и тормозится, вследствие чего останавливается и соответствующее звено. Во время движения скорость звена будет соответствовать скорости вращения вала управляющего двигателя. При этом достаточно, чтобы мощность каждого управляющего электродвигателя составляла 4-5% от мощности, развиваемой приводным двигателем в соответствующем шарнире. В предлагаемой конструкции манипулятора управление движением звеньев механической руки производится заданием скоростей и направлений вращения валов соответствующих управляющих электродвигателей. Мощность приводного электродвигателя, расположенного в основании манипулятора, идет на преодоление моментов нагрузки и на сообщение звеньям механической руки заданных скоростей. Использование маломощных управляющих электродвигателей, имеющих малую массу и габариты, снижает вес и инерционность звеньев механической руки, что в сочетании с большой мощностью приводного электродвигателя позволяет существенно увеличить грузоподъемность манипулятора, а также скорости перемещения звеньев его руки. Формула изобретения 1. Манипулятор, содержащий основание, механическую руку с шарнирно сочлененны 1и звеньями и дифференциалами, отличающийся тем, то, с целью увеличения грузоподъемности, он снабжен дополнительными коническими передачами, волновыми передачами, управляющими двигателями и приводным двигателем, причем одно солнечное колесо дифференциала каждого предыдущего звена через сателлит и водило кинематически связано с солнечным колесом дифференциала каждого последующего звена, второе солнечное колесо дифференциала кинематически связано с дополнительной конической передачей этого шарнира, гибкие колеса волновых передач находятся в зацеплении с колесами дополнительной конической передачи, управляющие двигатели встроены в шарниры и их-валы кинематически связаны с генераторами волновых передач, а приводной двигатель установлен в основании манипулятора и его вал кинематически связан с солнечным колесом первого дифференциала. 2. Манипулятор по п. 1, отличающийся тем, что сателлит каждого дифференциала выполнен в виде втулки с внутренним и внешним зубчатыми венцами, входящими в зацепление с внутренними и внешними солнечными колесами. Источники информации, принятые во внимание при экспертизе 1. Кобринский А. Е. и др. Принципы построения двигательной системы автоматических манипуляторов с программным управлением. «Станки и инструмент, 1976, № 4, с. 3-9.
