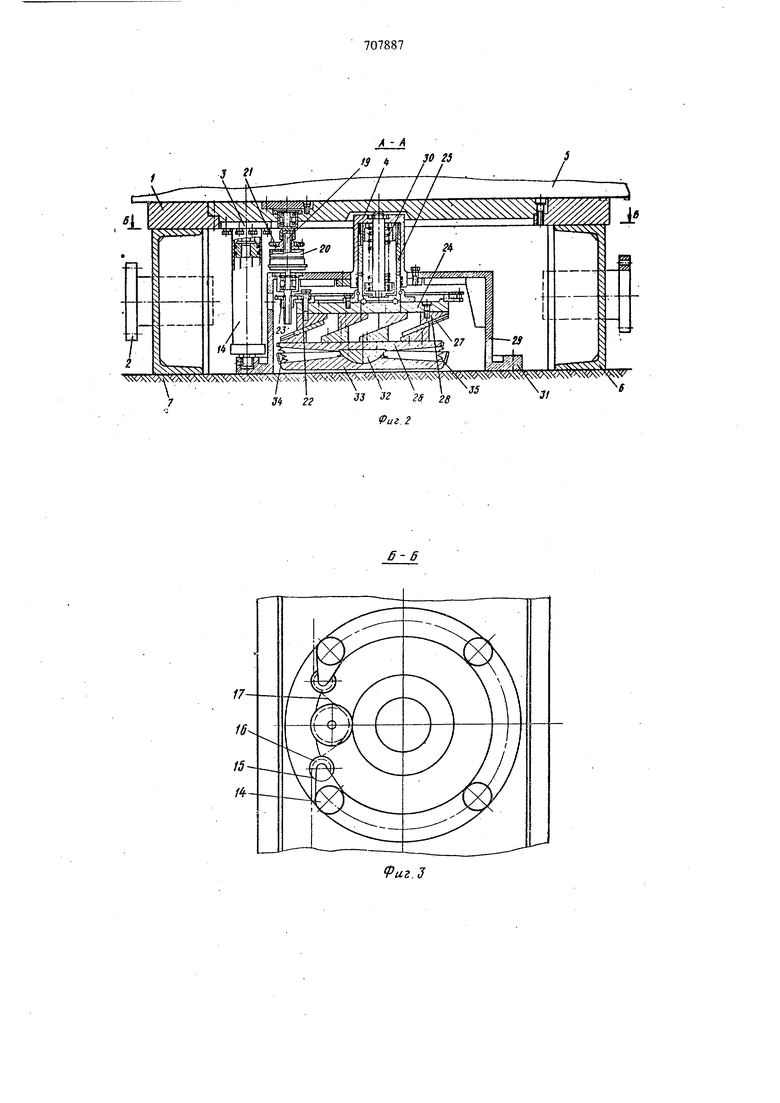
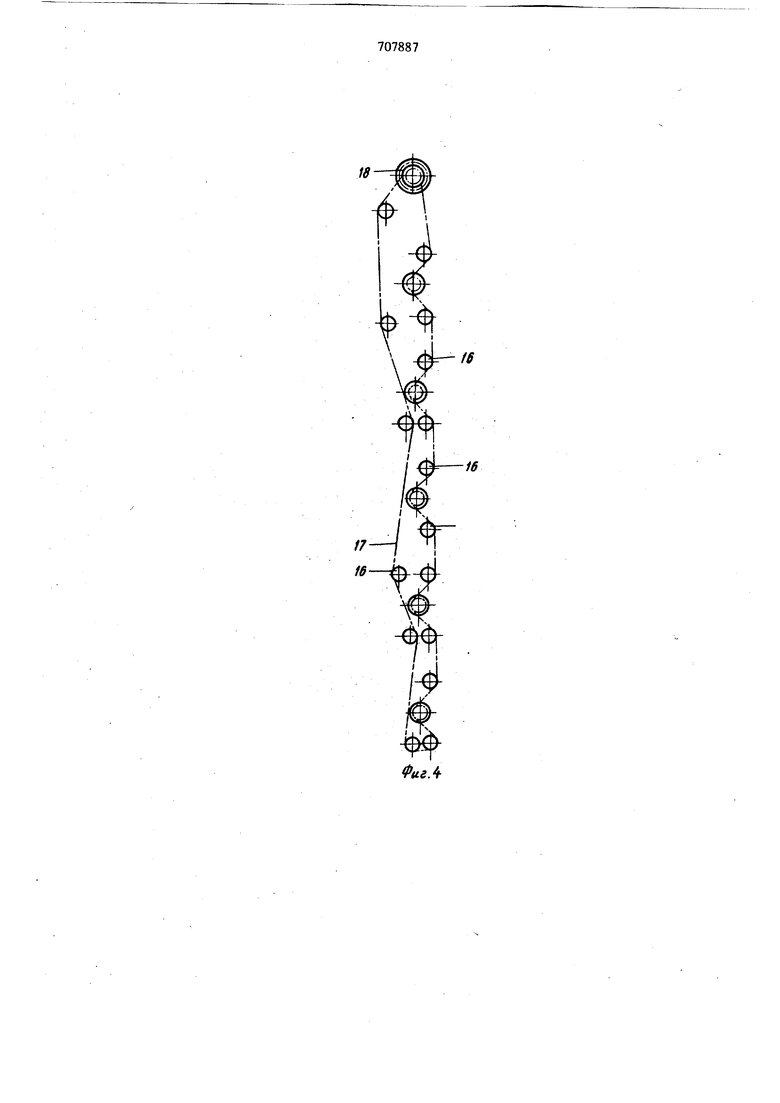
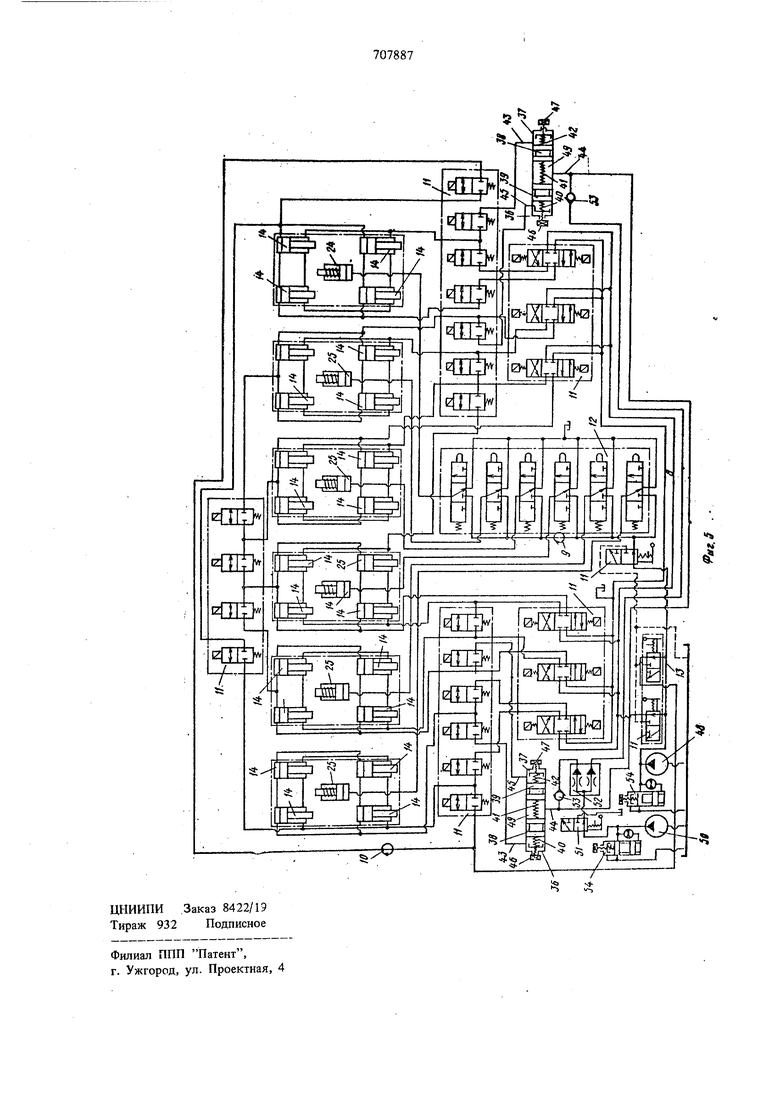
Изобретение относится к подъемно-транспорт ному машиностроению и может быть использовано непосредственно в устройствах для подъема и транспортирования груза. Наиболее близким к изобретению является устройство для подъема и перемещения груза, содержащее платформу, снабженную основными домкратами, выполненными с рамой, силовыми далиндрами дво1{ного действия и дополнительными домкратами, содержащими силовые цилиндры, соединенные посредством основното коллектора с насосной станцией. Недостатком устройства является невозможность перемещения груза по наклонному основанию. Цель изобретения - обеспечение горизонталь ного перемещения груза по наклонному основа Поставленная цель достигается тем, что силовые цилиндры двойного действия основного домкрата верхними торцами жестко закреплены на платформе, а нижними - на раме, которая закреш1ена на дополнительных домкратах, снабженных шарнирно смонтированным на нижнем торце силового цилиндра и расположенным под рамой ступенчатым клиновым механизмом, содержащим верхнюю и нижнюю плиты, снабженные клиньями, взаимодействующими между собой, и сферическим подпружиненным бащмаком, смонтированным на нижней плите, при этом устройство снабжено дополнительным коллектором, снабженным разгрузочным клапаном и соединенным с основным коллектором и с силовыми шшиндрами двойного действия. На фнг. 1 изображено предлагаемое устройство, вид сверху; на фиг. 2 - разрез А-А фиг. 1; на фнг. 3 - разрез Б-Б фиг. 2; на фиг. 4 - принципиальная кинематическая схема управления поворотом; на фиг. 5 - гидравлическая схема устройства. Устройство для подъема я транспортировании грузов содержит платформу 1 с жестко присоединенными к ней стыковочными модулями 2. К платформе 1 жестко прикреплены основные домкраты 3 для вертикального и дополнительные домкраты 4 для горизонтального перемещения платформы 1. Усгаиовлениый на платформе
1 груз 5 передает нагрузку через опорный башмаки 6 на грунт 7. Домкраты .1 и 4 соединены между собой основными 8 и 9 и дополнительным 10 коллекторами и посредством распределителей 11 и 12 связаны с напорным трубопроводом 13. Распределители 11 и 12 скомпонованы на общей раме.
Каждый основной домкрат 3 содержит силовые цилиндры 14, на которых посредством кронштейнов 15 закреплены звездочки 16, несущие цепь 17, приводимую в движение приводной звездочкой 18. На приводной телескопический валик 19, расположенный под платформой 1, жестко посажена электромагнитная муфта 20 со звездочкой 21, которые передают кругящий от валика 19 зубчатому колесу 22 посредством вал-шестерни 23. Зубчатое колесо 22 жестко соединено с верхней плитой
24 клинового механизму, шарнирно закрепленной на силовом цилиндре 25 дополнительного домкрата 4. Клиновой механизм содержит верхнюю 24 и нижнюю 26 плиты с клиньями 27, выполненные с взаимодействующими между собой направляющими 28.
Верхние концы цилиндров 14 закреплены
жестко на платформе I, а нижние - на раме 29, которая смонтирована на дополнительном домкрате. В цилиндрах 25 расположена пружин сжатия 30, а рама 29 выполнена с дополнительной опорной площадкой 31.
Стыковочные модули 2 позволяют собирать устройство из отдельных секций требуемой грузоподъемности и формы в зависимости от массы груза 5.
Для лучшего взаимодействия платформы 1 с поверхностью грунта 7 и ориентации устрой-ства относительно заданного направления движения клиновые механизмы снабжены сферическими подпятниками 32, которые взаимодействуют с клиновым механизмом и башмаками 33 посредством пружин 34 и 35.
Основной 8 и дополнительный 10 коллекторы соединены между собой разгрузочным клапаном с корпусами 36 и 37 посредством надштоковой и подштоковой полостей цилиндров 14. Разгрузочный клапан содержит плавающие поршни 38 и 39, взаимодействующие посредством сжатых пружин 40-42 между собой и с корпусами 36 и 37.
Корпуса 36 и 37 соединены с трубопроводами. 43-45 для подвода и отвода рабочей жидкости. Усилие предварительного сжатия пружин 40-42 обеспечивается винтами 46 и 47, свернутыми в корпуса 36 и 37 разгрузочного клапана.
Подачу рабочей жидкости в цилиндры 14 и 25 осуществляют насосом 48.
Перед началом движения устройства гидравлическая система заполнена рабочей жидкостью
Полость 49 разгрузочного клапана постоянно заполнена рабочей жидкостью, поступающей от насоса 50 через распределитель 51, делитель потока жидкости 52 и обратные клапаны 53. От перегрузки гидросистемы установлены напорные золотники 54.
Устройство для подъема и транспортирования груза работает в следующих режимах:
подъем и опускание груза;
горизонтальное транспортирование труза по ровной и наклонной поверхностям;
транспортирование груза через препятствия (каналы канализации коммуникаций, рельсовые пути, уступы и т. д.). г
Режим транспортирования груза по ровной и наклонной поверхности. Рабочая жидкость от насоса 48 через гидрораспределитель по коллектору 9 поступает в дополнительные домкраты 4 для горизонтального перемещения. Под действием давления жидкости цилиндра 25 клиновой механизм опускается вниз, а башмаки 6 отрываются от дорожного покрьггия. В момент, когда сила трения башмаков о дорожное покрытие меньше силы тяги клинового механизма (сила тяги возникает от действия массы груза 5 и устройства вследствие разложения последних на две составляющие: горизонтальную и вертикальную), машина начинает перемещаться. Обеспечивая расход жидкости в напорной магистрали, машина перемещается на один шаг.
При выпускании рабочей жидкости из цилиндра 25 домкрата 4 по коллектору 9 (включением распределителя 13 на слив) предварительно сжатая пружина 30 домкрата 4 возвращает верхнюю 24 и нижнюю 26 плиты в исходное положение. При этом нижняя плита 26 под действием собственной массы скользит по направляющим 28 как по наклонной плоскости
Аналогично происходит включение остальных клиновых механизмов с некоторым рассогласованием по времени включения, что достигается конструкцией распределителя 12. Благодаря этому устройство для транспортирования груза, снабженное движителем шаговых перемещений, движется непрерывно.
При движетши устройства под или на уклон центр тяжести массы устройство-груз смещается в сторону уклона. Вследствие этого нагрузка на основные домкраты 3 перераспределяется с возрастанием в сторону уклона. При этом давление в крайнем домкрате 3 со стороны уклона возрастает, а в крайнем противоположном уменьшается, и цилиндры 14 соответственно опускаются и поднимаются. Из цилиндра более нагруженного (крайниГ левый) рабочая жидкость поступает в корпус 36 разгрузочного клапана по трубопроводу 43 и дейсгвует на поршень 38. 5 Поршень 38 корпуса 36 через объем жидкости, находящейся в межпоршневой полости, |Перемешает поршень 39 и выжимает рабочую жидкость в подштоковые полости средних дом кратов, которые соединены между собой последовательно. Из надштоковых полостей средних домкратов 3 рабочая жидкость поступает в корпус 37 по трубопроводу 45. Одновременно в корпус 37 по трубопроводу 43 рабочая жидкость поступает в подпоршневую полостькрайнего правого домкрата 3. Процесс перемещения поршней 38 и 39 корпуса 37 происходи аналогично,. как описано выше для корпуса 36 разгрузочного клапана. При этом цилиндры 14 крайнего ггравого домкрата 3 опускаются (совместно с устройствоми грузом см. фиг. 2) до тех пор. пока давление во всех основных домкратах не уравновесится, что обеспечивает горизонтальное положение груза 5. Режим транспортирования груза через препятствия. При подходе устройства к препятствию управлением распределителя 11 рабочая жидкость поступает в штоковые полости цилиндров 14 основного домкрата 3, близлежащего к препятствию. Под действием рабочей жидкости его поршень перемещается вверх. Далее продолжается горизонтальное движение, как описано выше, в режиме транспортирова1шя груза по ровной поверхности. Когда часть платформы 1 с поднятым домкратом 3 пройдет над препятствием, аналогично включают в работу следующий домкрат 3, при этом первый опускают. Подъем и опускание цилиндров 14 домкратов 3 производят до тех пор, по :ка все устройство не пройдет над препятствием Режим подъема и опускания груза, i При подъеме груза управлением распределителей 11 рабочую жидкость подают.в надштоковые полости цилиндров 14 основного домкрата 3. При опускании груза рабочую жидкость аналогично подают в подштоковые полости цилиндров 14. Изменение направления движения до 360° от носительно заданного направления движения ocy ществляют включением всех электромагнитных муфт 20 под напряжение и поворотом приводной звездочки 18 на требуемый угол. Движе1ше от звездочки 18 передается роликовой цепью 17 звездочке 21, электромагнитной муфте 20, телескопическому валику 19 и его выходному вал-шестерне 23. Вал-шестерня 23 передает движение зубчатому колесу 22, которое поворачивает жестко с ней связанный клино7вой механизм на требуемый угол. Изменив таким образом направление уклона клиновых механизмов, изменяют направление движения. Разворот устройства на месте осуществляют выключением одной электрической муфты 20 и выполнением операций, отданных выше, для изменения направления движения под углом |до 360° оставшихся муфт под напряжением с той разницей, что изменение угла производится не непрерывно, а ступенчато. Изменив угол на небольшую величину (0,5-1°) и выключив муфты 20 всех домкратов 3, транспортируют устройство с грузом на часть шага, который определяется свободным выбегом устройства и достигается уменьшеш1ем расхода рабочей жидкости в цилиндрах 25 домкратов 3. Вследствие этих действий возникает вращаюишй момент, . вызванный силой тяги в каждом включенном домкрате 3 относительно домкрата с выключенной муфтой 20. Поворот устройства происходит вокруг сферического подпятника 32. Формула изобретения Устройство для подъема и перемещения груза, содержащее платформу, снабженную основными домкратами, выполненными с рамой, силовыми цилиндрами двойного действия и доПЬлнительными домкратами, содержащими силовые цилиндры, соединенные посредством основного коллектора с насосной станцией, о т личающееся тем, что, с целью обеспечения горизонтального. перемещения груза по наклонному основанию, силовые цили|щры двойного действия основного домкрата верхними торцами жестко закреплены па платформе, а нижними - на раме, которая закреплена на дополнительных домкратах, снабжеш1ых щарнирно смонтированным на нижнем торце силового цилиндра и расположенным под рамой ступенчатым клиновым механизмом, содержащим верхнюю и нижнюю плнты, снабженные клиньями, взаимодействующими между собой, и сферическим подпружиненным башмаком, смонтированным на нижней плите. При этом устройство снабжено дополнительным коллектором, снабженным разгрузочным клапаном и соединенным с основным коллектором и с силовыми цилиндрами двойного действия. Источники информаили, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 529994, кл. В 66 F 3/24, 1976.
18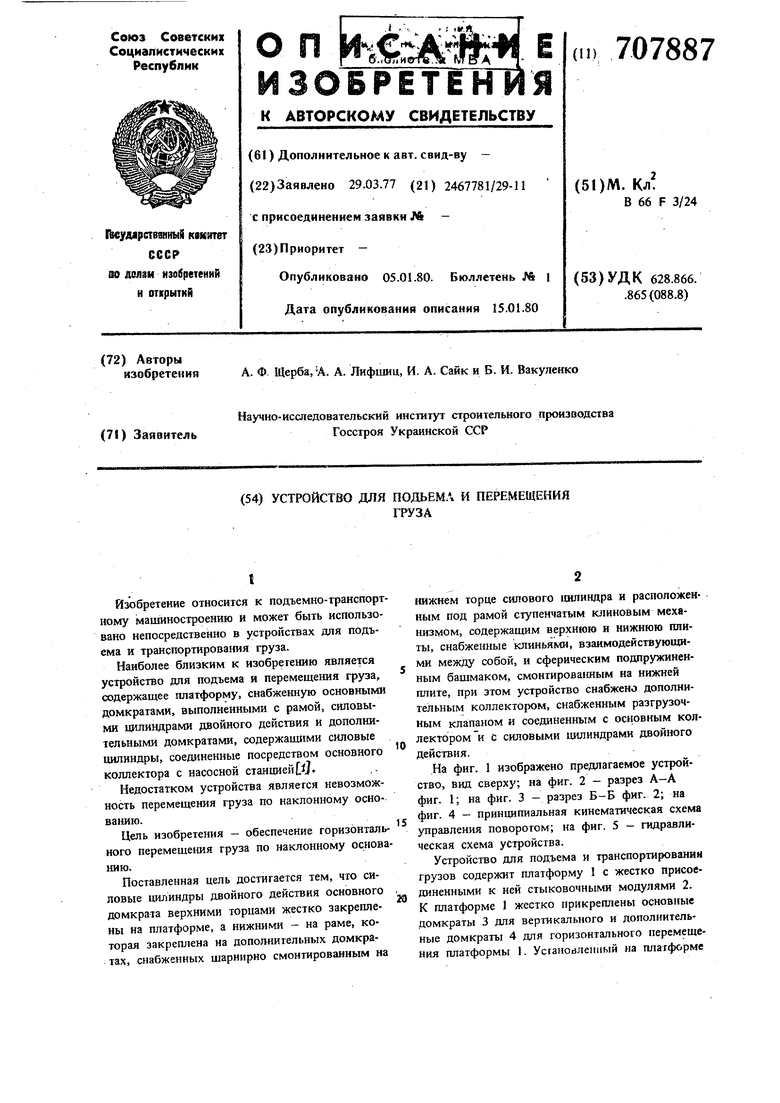
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| Погрузчик контейнеризированных грузов | 1988 |
|
SU1614973A1 |
| АВТОМАТ УКЛАДКИ СВАРОЧНЫХ ЭЛЕКТРОДОВ В КОНТЕЙНЕР | 1996 |
|
RU2138380C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ДЛИННОМЕРНОГО ИЗДЕЛИЯ ПРИ ЕГО МОНТАЖЕ | 2003 |
|
RU2260556C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА В ТРАНШЕЕ УЧАСТКА ТРУБОПРОВОДА ПРИ ЕГО РЕМОНТЕ | 1991 |
|
RU2041413C1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ МОЙКИ ИЗДЕЛИЙ | 1992 |
|
RU2008988C1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| Устройство для взвешивания собранного урожая сельскохозяйственных культур | 1989 |
|
SU1683553A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, В ОСОБЕННОСТИ СТРОИТЕЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2432433C1 |
| УСТАНОВКА ПОДЪЕМНАЯ ДЛЯ ОСВОЕНИЯ И РЕМОНТА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН УПА 60А | 2007 |
|
RU2362867C2 |
16
17 16
