Изобретение относится к транспортным средствам на воздушной подушке, а именно к внутривокзальным транспортно-погрузочным средствам механизации на воздушной подушке, и может быть использовано для вы- полнения погрузочно-разгрузочных работ при обработке авиационных контейнеров и поддонов (далее контейнеров) в багажных отделениях аэропортов различных классов и регионов.
Цель изобретения - уменьшение габаритов погрузчика и повышение удобства пользования за .счет исключения тяжелого фи- 1зического труда при приеме, перемешении |и съеме грузов и его автономности. I На фиг. 1 дан погрузчик в рабочем поло- |жении, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема пневмопитания и управления устройством; на фиг. 4 - схема работы выключателей; на фиг. 5 - структурная блок-схема управления процессом взве- шивания багажа.
Погрузчик контейнеризированных грузов на воздушной подушке (фиг. I и 2) состоит из силовой рамы 1, к нижней части которой крепятся аэростатические опоры (AGO) 2, служащие для перемещения погрузчика, и упорньЕе башмаки 3. На силовой раме 1 |установлены платформа, 4, механизм 5 подъе- |ма, выполненный в виде надувной оболочки, с рычажными ножницами 6, служащими направляющими для параллельного подъема противоположных концов платфор- мы, стопорный механизм 7, блок 8 управления, установленный на панели 9. На плат- Iформе 4 установлены продольные секции |10 (фиг. 2), включающие аэростатические |опоры (АСО) 11, расположенные на одной |линии диафрагмой кверху, боковые упоры |12, вьтолненные в виде обрезиненнь х ро- 1ЛИКОВ и расположенные таким образом, |чтобы их оси лежали на линии, касатель- |ной к окружности АСО 11 с боковой стороны iплатформы, торцовые рольганги 13, служа- щие для подхвата груза с другого средства механизации, торцовые откидывающиеся упоры 14, приводящиеся в действие осью 15 и ручкой 16, предотвращающие скатывание груза с платформы 4 в продольном направлении. Для обработки различ- ных типов контейнеров (разных габаритов) продольные секции 10 перемещаются в поперечном направлении с помощью домкрата 17 (фиг. 2), включающего ручку 18, винтовую ось 19, гайки 20, стопор 21, причем резьба для одной гайки - левая, для дру- гой - правая. Стопор 21 жестко связан с платформой 4, а гайки 20 жестко связаны каждая со своей секцией. На секциях закреплены датчики-переключатели 22, которые служат для последовательного автоматического включения (выключения) аэро- статических опор 11 при наезде на них контейнера 23, перемещающегося с другого транспортного средства 24. Механизм 5
подъема подключен через гибкий шланг 25 с быстросъемной муфтой 26 (фиг. 3) к компрессору (не показан).
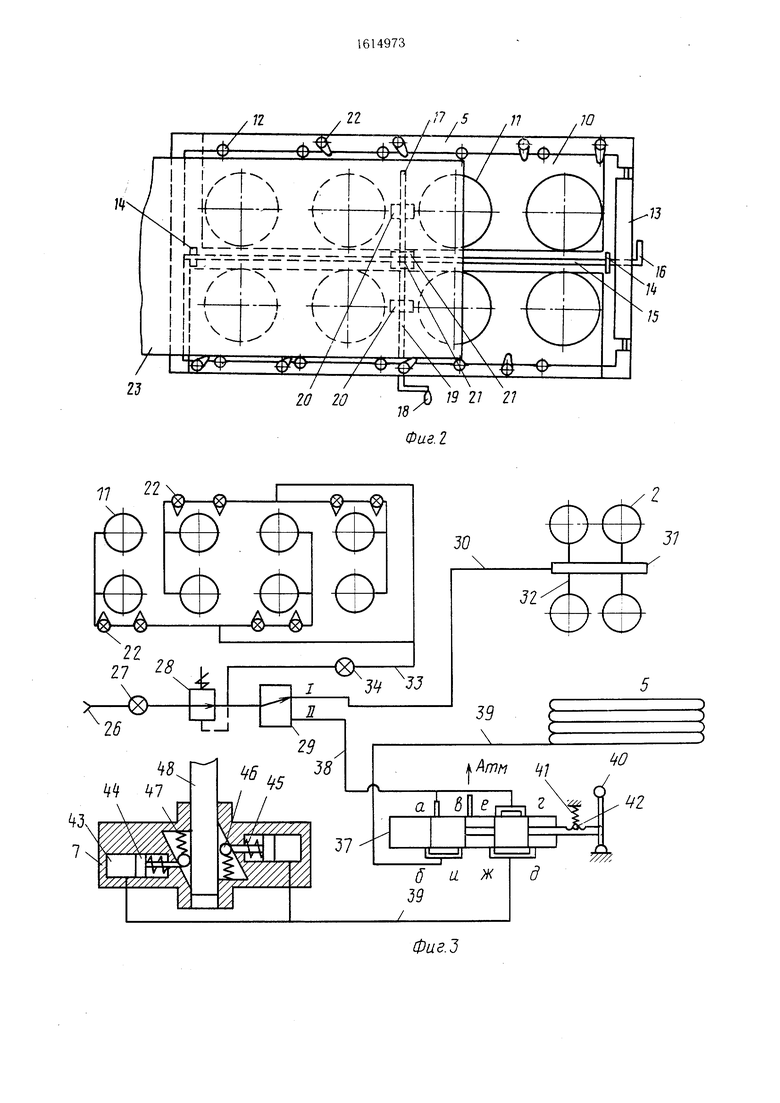
Схема пневмопитания и управления (фиг. 3) включает кран 27, редуктор 28, двухпозиционный кран 29. Трубопровод 30 соединяет кран 29 с ресивером 31, который с помощью трубопроводов 32 соединен с аэростатическими опорами 2. Трубопровод 33 через кран 34 соединяет редуктор 28 с АСО 11 через полости 35 и 36 (фиг. 4) датчиков-переключателей 22, попарно установленных на каждой поперечной паре АСО 11 секций 10.
Трехпозиционный кран 37 соединен с краном 29 трубопроводом 38, трубопроводом - с надувной оболочкой и трубопроводом 39 - со стопорным устройством 7. Работа крана 37 производится регулированием ручки 40 (подъем платформы, опускание, установка на заданном уровне), снабженной фиксатором, состоящим из пружины 41 и ролика 42, перескакивающего при повороте ручки 40 в соответствующее положению углубление.
Стопорный механизм 7 содержит цилиндры 43, в которых перемещаются поршни 44, расположенные на штоках 45, ролики 46, соединенные пружинами 47 с корпусом, и перемещающуюся в вертикальном направлении силовую балку 48.
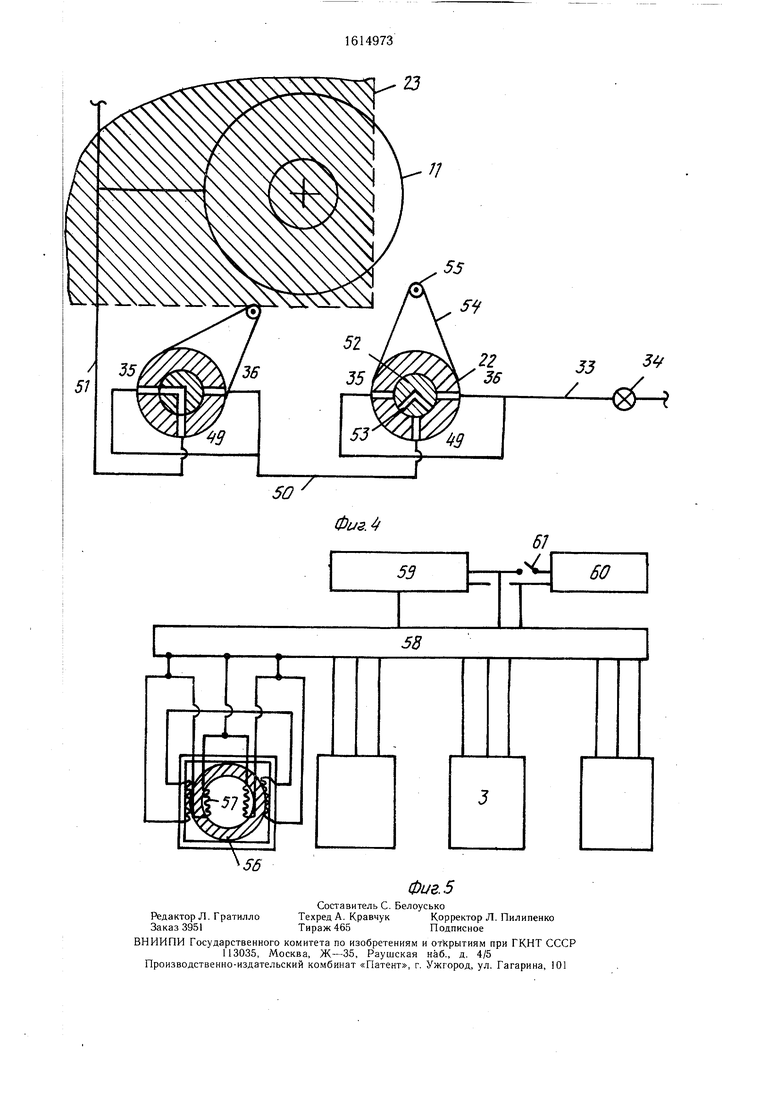
Полость 49 (фиг. 4) датчика-переключателя, расположенного с правой стороны платформы, соединена трубопроводом 50 с полостями 35 и 36 левого датчика-переключателя 22, а его полость 49 соединяется трубопроводом 51 с парой АСО 11. Датчик- переключатель 22 имеет втулку 52 с каналом 53, соединенную с рычагом 54, на конце которого смонтирован обрезиненный ролик 55, причем датчик-переключатель 22 расположен таким образом, что при движении контейнера 23 вдоль боковых упоров 12 его стенок касаются только ролики 55, а длина рычагов 54 подобрана таким образом, что при касании контейнера 23 они поворачиваются в одну или другую сторону на угол, обеспечивающий открытие датчика- переключателя 22.
Нормальное положение датчика-переклю- чататя 22 (фиг. 4, правая позиция) обеспечивается наличием возвратной пружины (не показана).
Упорный бащмак 3 (фиг. 5) включает встроенное силовое кольцо 56, на которое наклеен тензодатчик 57. Аналогично устроен другой упорный башмак. Тензодатчики 57 соединены с усилителем 58, показания сигналов от которого выводятся на индикатор 59. Для питания усилителя 58 и индикатора 59 имеется блок 60 питания, подключаемый с помощью кнопки 61.
Порядок работы устройства следующий.
Устройство устанавливается около транспортного средства 24, с которого должен
быть перемещен контейнер 23 (фиг. ). Двухпозиционный кран 29 (фиг. 3) устанавливается в положение, соединяющее вход с выходом I (если уровень стола транспортного средства 24 выще уровня платфор- мы 4). Ручка 40 трехпозиционного крана 37 поворачивается вправо (фиг. 3), вследствие чего отверстие а соединяется с отверстием б и сжатый воздух идет в оболочку, приподнимая платформу 4. В это время отверстия в, г, и d закрыты, а отверстие е соединено с отверстием ж и воздух по трубопроводу 39 поступает в цилиндры 43. Под действием сжатого воздуха порщни 44 сдвигаются навстречу друг другу и штоками 45, концы которых выполнены в виде кли- ньев, перемещают ролики 46 (левый - вверх, правый - вниз), давая возможность силовой балке 48 перемещаться вверх.
При достижении заданной высоты платформой 4 ручка 40 ставится в исходное положение. Отверстия а, и, б закрываются и тем самым оболочка изолируется от источника сжатого воздуха и атмосферы. Отверстие ж соединяется с отверстием в. Воздух из цилиндров 43 уходит в атмосферу, вследствие чего порщни 44 со щтока.ми 45 раздвигаются, а ролики 46 под действием пружин 47 заклинивают силовую балку 48. При необходимости регулирования положения платформы 4 по высоте ручка 40 ставится последовательно в необходимое положение или поворачивается влево по фигуре. В этом случае отверстие в соединяется с отверстием и и воздух из оболочки уходит в атмосферу, вследствие чего платформа 4 опускается.
Стопорный механизм этому не препятствует, так как с поворотом ручки 40 влево отверстие г соединяется с отверстием д, сжатый воздух по трубопроводу 39 поступает в цилиндры 43 и порщни 44 со щтоками 45 двигаются навстречу друг другу, отжимают ролики 46 и дают возможность силовой балке 48 двигаться вниз.
В этом положении открывается кран 34 и воздух поступает в трубопровод 33 и к датчикам-переключателям 22.
Корпус датчика-переключателя 22 должен быть установлен таким образом, чтобы он не выступал за боковые упоры 12 со стороны контейнера 23, а диаметр обрезинен- ного ролика 55 и длина рычага 54 подо- браны так, чтобы рычаг 54 при контакте со.стенкой контейнера 23 поворачивался на 45°, причем ролик 55 должен нахо- диться выще плоскости диафрагмы аэростатических опор 11 в рабочем положении (надутом), а расстояние между осями корпусов датчиков-переключателей 22 равны диаметру аэростатических опор 11. Затем начинается перемещение контейнера 23 с транс- портного средства 24. Край контейнера опирается на рольганг 13 и далее поворачивает через ролик 55 ближайщий рычаг 54
датчика-переключателя 22. При дальнейшем движении корпус контейнера 23 поворачивает рычаг 54 второго датчика-переключателя 22, после чего воздух поступает в первую пару АСО 11. Взаимное расположение датчиков-переключателей 22 и .AGO 11 подобрано таким образом, что воздух в .ЛСО I подается только тогда, когда днище контейнера 23 полностью закрывает .А СО 11 первого, второго и т.д. поперечных рядов, приче.м это обеспечивается при прямом и обратно.м движении контейнера 23.
При необходимости обработки предлагае- .мым устройство.м различных типов контейнеров предусмотрено раздвигание или сдвигание секций 10 в поперечном направлении с помощью домкрата 17. Пастройка данной систе.мы перемещения заключается в установке секций 10 таким образом, чтобы расстояние между противоположными боковыми упорами 12 составляло /+6, где / - ширина контейнера; 8 - зазор. Для этого вращают ручку 18 домкрата, которая, бу- .аучи закрепленной в стопоре 21 от осевых перемещений, передвигает гайки 20. Так как гайки 20 жестко связаны с продольными секциями 10, то вслед за гайками 20 перемещаются продольные секции 10. Из-за наличия левых и правых резьб в гайках 20 секции 10 синхронно либо сдвигаются, либо раздвигаются относительно продольной оси платформы 4. Вращение рукоятки 18 прекращается, ко|-да расстояние между боко- упорами 12, находящимися на про- тивопо. южных сторонах платформы 4 составляет /+6. Перемещение продольных секций 10 происходит по поперечным направляющим (не показаны), которые являются принадлежностью платформы 4.
Для предотвращения соскальзыва-ния скомплектованного и опломбированного контейнера 23 с устройством в продольном направлении имеются торцовые упоры 14, настройка которых заключается в установке каждого на расстояние от центра платформы, равное L/2 + Л, где L - длина контейнера 23, Д - высота упора. Конструкция торцовых упоров такова, что позволяет им поворачиваться относительно оси 15 только в сторону центра пла1;фор.мы 4. Торцовые упоры 14, подпружинены таким образом, что всегда находятся под углом 90 к оси 15. Торцовые упоры 14 могут перемещаться вдоль оси 15 и укрепляться на ней в любой точке. Для настройки торцовых упоров 14 ручка 16 поворачивается на 180° таким образом, чтобы торцовые упоры 14 занимали вертикальное положение и выступали над платформой 4. После этого правый торцовый упор 14 пере.хкмцается по оси 15 и устанавливается на расстоянии от центра, равном L-|-A/2. после чего закрепляется на оси о. Левый торцовый упор 14 устанавливается на таком же расстоянии от центра и также крепится к о|:и 15.
i Когда контейнер 23 подается с транс- п(|)ртного средства 24 на платформу 4 уст- р йства, он наезжает на ближайший к н4му торцовый упор 14, который складывается и пропускает контейнер 23. Когда контейнер 23 упирается во второй торцо- упор 14, то он освобождает первый терцовый упор 14, который под действием а )ужины (не показана) занимает исходное положение, после чего можно транспор- т {ровать контейнер 23 к месту его перегрузки. После того, как контейнер 23 установлен на платформе 4, кран 34 закрывается, воздух И} АСО 11 выходит и контейнер опуска- ется на корпуса АСО 11, причем с боков он фиксируется боковыми упорами 12. Далее кэан 37 ставится в положение, при котором п злость отверстия ж соединяется с полостью отверстия 8, т.е. сжатый воздух из цилинд- ров 43 выходит в атмосферу, пружины 47 вместе с роликом 46 освобождают силовую балку 48. Затем кран 37 ставится в положение, при котором полость отверстия б соединяется с полостью отверстия и, вшдух из оболочки выходит в атмосферу и платформа 4 с контейнером 23 опуска- егся до крайнего нижнего положения. Для перемепдения самого погрузчика к месту перегрузки кран 29 ставится в положение, при котором вход соединяется с выходом II, воздух поступает в трубопровод 30, р|есивер 31 и далее через трубопроводы з|2 в АСО 2. Для прекращения работы С|истемы кран 27 закрывается. Для того, 1|тобы опять снять (переместить) контейнер 33 с платформы 4, ручка 16 поворачивается |а 180°, торцовые упоры также поворачива- |отся на 180°, занимая положение под Платформой 4, после чего контейнер 23 |иожно перемещать в прямом и обратном Направлениях. Пружины, шарниры и эле- Менты крепления торцовых упоров к оси не Показаны.
После установки устройства с пустым контейнером 23 около регистрационной стойки и включения системы измерения массы с помощью кнопки 61 происходит укладка багажа в контейнер 23. В это время погрузчик находится на упорных башмаках 3, в которых установлены силовые кольца 56 с тензодатчиками 57. За счет деформации колец 56 происходит изменение величины сигнала, поступающего в усилитель 58. Величина этого сигнала тариру- ется и после его усиления на индикаторе 59 высвечивается показание массы сданного багажа.
Далее операции по перемещению устройства к месту перегрузки на другое транспортное средство повторяются.
Технико-экономический эффект заклю- чается в снижении металлоемкости конструкций, а следовательно, и себестоимости средств, сокращении площадей и численности обслуживающего персонала.
Формула изобретения
1. Погрузчик контейнеризированных грузов, содержащий платформу с расположенным на ней механизмом перемещения грузов, имеющую по торцам поперечно расположенные рольганги для приема контейнера на платформу, основание со смонтированным на ней механизмом подъема платформы, имеющим стопорное устройство для его фиксации, отличающийся тем, что, с целью уменьшения габаритов погрузчика и повышения удобства пользования за счет исключения тяжелого физического труда при приеме, перемещении и съеме грузов и его автономности, основание погрузчика установлено на аэростатические опоры, сообщенные с системой подачи воздуха, также сообщенной с механизмом подъема платформы, механизм перемещения грузов выполнен в виде продольно расположенных отдельных секций с боковыми упорами, связанных между собой винтовым домкратом для раздвижки секций в поперечном направлении, при этом каждая секция со стороны установки груза снабжена аэростатическими опорами в виде перевернутых диафрагм, параллельно сообщенных через переключатели и кран с системой подачи воздуха, основание с нижней стороны снабжено упорными башмаками, платформа выполнена с торцовыми упорами, установленными с подвижностью вдоль опор секций, система подачи воздуха включает в себя источник сжатого воздуха, сообщенный через кран с входом редуктора, при этом переключатели выполнены в виде кранового аппарата с рычагом, оснащенным роликом для взаимодействия с перемещаемым контейнером.
2.Пог,рузчик по п. 1, отличающийся тем, что система подачи воздуха включает в себя двухпозиционный кран, два выхода которого соответственно сообщены с аэростатическими опорами основания и через управляемый распределитель - с оболочкой и управляющей полостью стопорного устройства.
3.Погрузчик по п. 1, отличающийся тем, что механизм подъема погрузчика выполнен в виде надувной оболочки с рычажным механизмом в виде ножниц, а стопорное устройство кинематически связано с местом связи рычагов между собой.
4.Погрузчик по п. 1, отличающийся тем, что, с целью регистрации массы грузов, упорные бащмаки оснащены тензодатчиками напряжения в стойках бащмаков, через усилитель соединенными с индикатором отображения информации.
;z
22
2J
;7
.10
75 27 n

| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-КРАН | 1995 |
|
RU2098318C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2544062C2 |
| Контейнер-платформа для транспортирования большеформатных строительных панелей | 1981 |
|
SU1017606A1 |
| Устройство для исправления продольного сдвига длинномерного груза в вагоне | 1990 |
|
SU1792905A1 |
| Самоходный погрузчик | 1978 |
|
SU779295A1 |
| Устройство для погрузки и разгрузки контейнеров и поддонов из транспортных средств | 1983 |
|
SU1161445A1 |
| СИСТЕМА ПОГРУЗКИ ГРУЗОВОГО АВТОМОБИЛЯ | 2019 |
|
RU2784834C2 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ДЛИННОМЕРНОГО ИЗДЕЛИЯ ПРИ ЕГО МОНТАЖЕ | 2003 |
|
RU2260556C2 |
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
Изобретение относится к транспортным средствам на воздушной подушке, а именно к внутривокзальным транспортно-погрузочным средствам механизации на воздушной подушке, и может быть использовано для выполнения погрузочно-разгрузочных работ при обработке авиационных контейнеров и поддонов в багажных отделениях аэропортов различных классов и регионов. Цель изобретения - повышение удобства пользования за счет исключения тяжелого физического труда при приеме, перемещении и съеме контейнера. Погрузчик контейнеризированных грузов на воздушной подушке содержит платформу 4 с расположенным на ней механизмом перемещения грузов, установленную на механизм 5 подъема грузов со стопорным механизмом 7, торцовые рольганги 13 и устройство взвешивания. Механизм перемещения грузов выполнен в виде продольных секций, соединенных винтовыми домкратами в поперечном направлении и содержащих боковые упоры 12, расположенные вдоль их внешних сторон, аэростатические опоры 11 с перевернутыми кверху диафрагмами, соединенные с системой подачи сжатого воздуха посредством датчиков-переключателей 22, имеющих рычаги, выполненные с возможностью касания ими грузов, платформа снабжена торцовыми упорами 14, выполненными с возможностью перемещения их вдоль продольной оси. Механизм подъема смонтирован на силовой раме 1, установенной на аэростатические опоры 2 и снабженной снизу упорными башмаками 3. Устройство взвешивания выполнено в виде тензодатчиков, смонтированных на упорных башмаках. Механизм подъема погрузчика выполнен в виде надувной оболочки с рычажным механизмом ножничного типа. 2 з.п. ф-лы, 5 ил.
Фи.е.1
30
31
39
б LL
39
Фие.З
50
/
Физ.
| Канарчук В | |||
| Е | |||
| и Чигринец А | |||
| Д | |||
| Механизация технологических процессов в аэропортах | |||
| М.: Транспорт, 1986, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
