(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ КОНФИПТАЦИИ ЗЕМЕ.ПЬНЫХ УЧАСТКОВ
шедипен с пходом переключателя, а выход переключателя - с другим входом схемы. с-равнения, выход которой соединен с управляющим входом ключа и управляющим входом перфоратора. Арифметическое устройс1во содер жит генератор пилообразного напряжения, схему сравнения, схему И, амплитудный детектор фазовый детектор, делитель-нормализатор и счетчик, Один из входов схемы сравнения соединен с выходом амплитудного детектора, другой - с выходом генератора пилообразного напряжения, а выход - с одним из входов схемы И, другой вход схемы И сое.динен с датчиком перемещения, а выход схемы И с входом делителя-нормализатора, выход которого соединен с входом счетчика, которого соединены с входами перфоратора. Управляющий вход счетчика подключен к выходу фазового детектора, вход которого соединен с выходом синусно-косинусного устройства и входом амплитудного детектора, выход которого соединен с входом схемы выделения дискрет угла. Счетчик выполнен реверсивным и соединен управляю цкм входом с выходом фазового детектора.
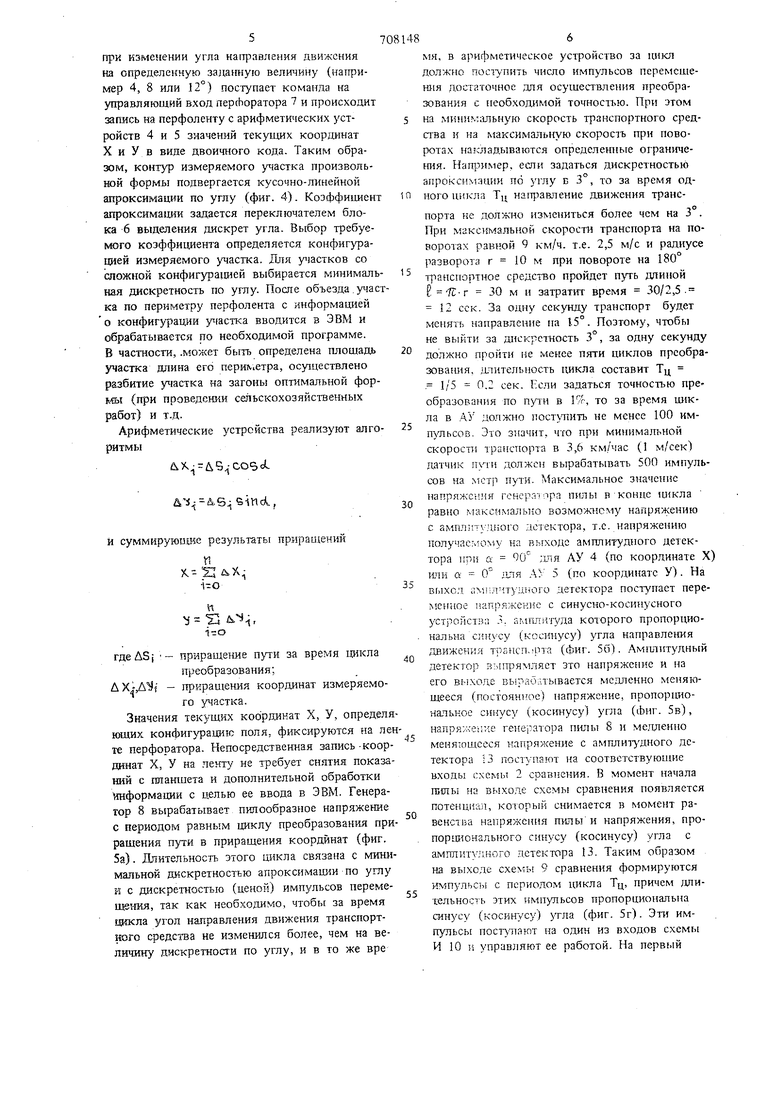
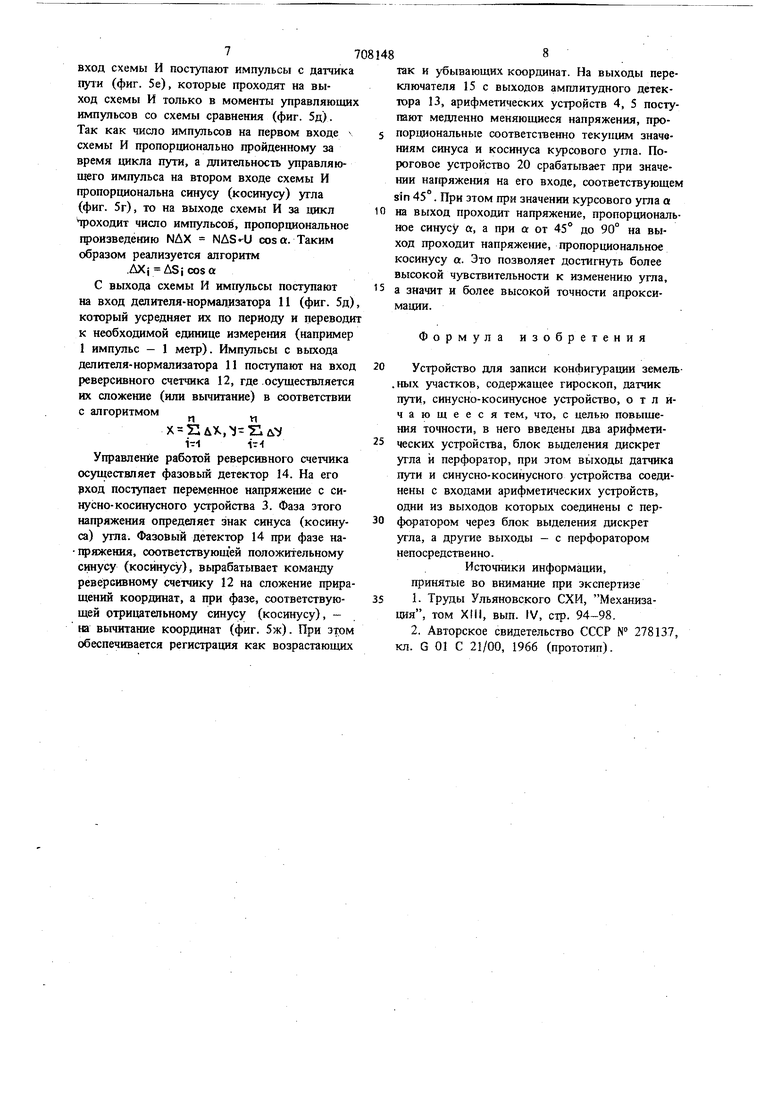
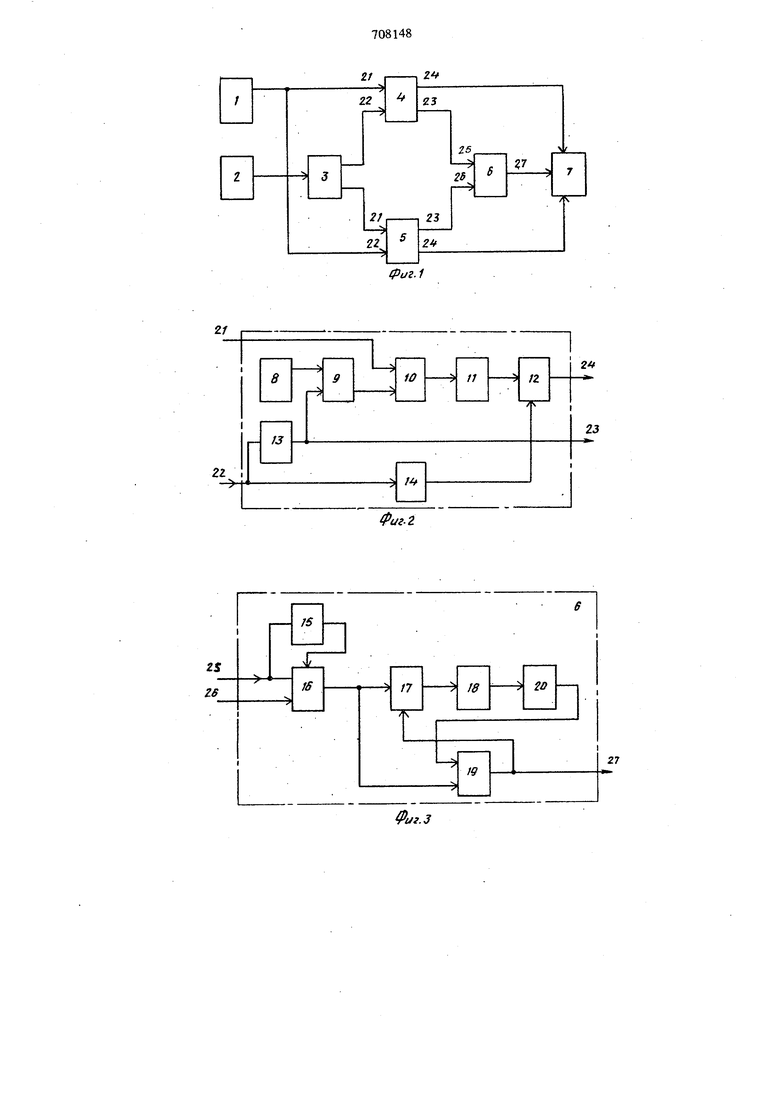
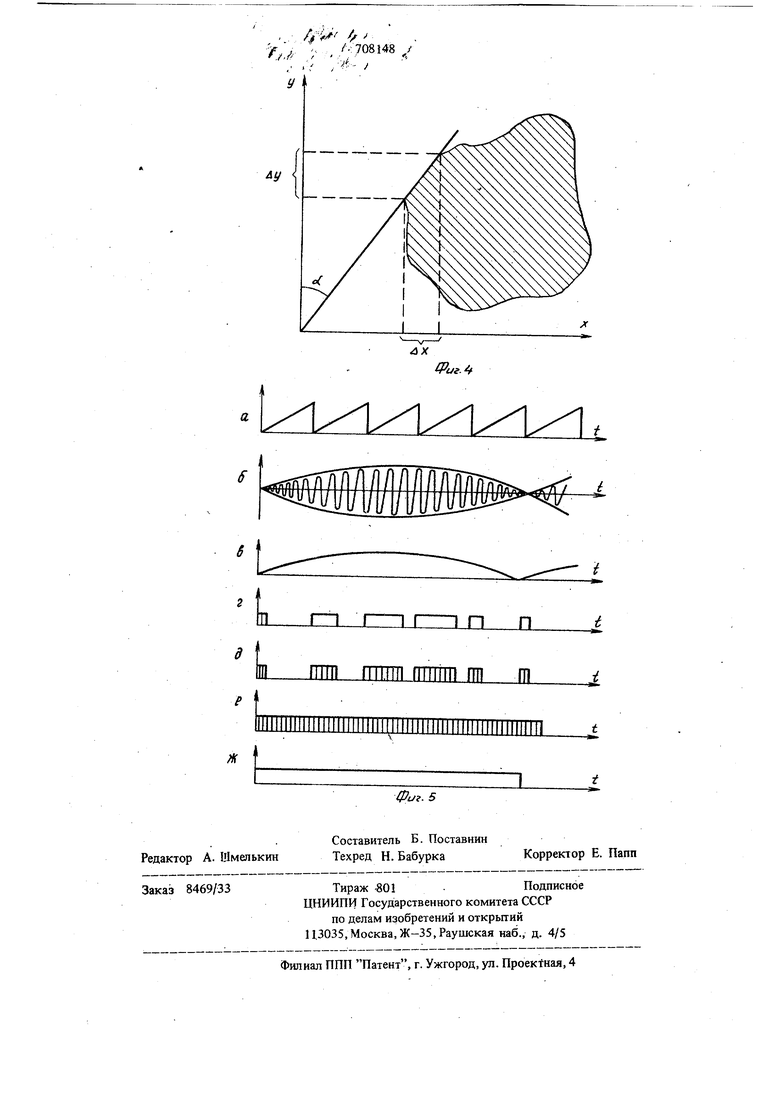
На фиг. 1 представлена структурная схема устройства для записи конфигурации земельных участков; на фиг. 2 - функциональная схема арифметического устройства; на фиг. 3 структурная схема блока выделегаи дяскрет угла; на фиг. 4 - изображение кусочно-линейной апроксимации по углу; на фиг. 5 диаграммы, поясняющие работу арифметического устройства, при этом на фиг. 5а изображена эпюра напряжения на выходе генератора; на фиг. 56 - эпюра напряжения на выходе синусно-косинусного устройства на фиг. SB эпюра напряжения на выходе амплитудного детектора; на фиг. 5г - эпюра напряжения на выходе схемы сравнения; на фиг. 5д эпюра напряжения на выходе сх.1;мы И 3; на фиг. 5е - эпюра напряжения на выходе даэтика перемещения; на фиг. 5ж - зягора напряжения на выходе фазового детектора.
Устройство содержит датчик J , датчик 2 углового положения, синусно-косинуское устройство 3, арифметические устройсгва (АУ) 4, 5, блок 6 выделения дискрет угла и перфоратор 7. Каждое арнфмет;ическое устройство содержит генератор 8 пилообразного напряжения, схему 9 сравнения, схему И 0, делитель-нормализатор 11, реверсивный счетчик 12, амплитудный детектор 13 и фазовый детектор 14. Блок выдепения дискрет угла содержит переключатель 15, ключ 16, пам5ггь 17, за датчик 18 угла, схему 19 сравнения и пороговое устройство 20. На схемах входы блоков 4, 5 обозначены позициями 21, 22,
4
выходы - 23, 24, входы блока 6-25, 26, выход - 27.
Устройство работает следующим образом. Перед началом объезда измеряемого участка производится ориентация датчика угло- вого положения по направлению на северный полюс и сброс всех счетчиков и элементов памяти устройства в нулевое положение. Затем транспортное средство, на котором установлено устройство, объезжает измеряемый yvacTOK по периметру с возвращением в исход ную точку. Сигналь с датчика кути 1 (фиг.5е) в виде импульсов, число которых за определенный промежуток времени пропорционально пройденному за это время пути, поступают на входы 21 арифметических устройств 4,5. Синусно-косинусное устройство 3 вырабатывает nepeMeffflfase напряжения, амплитуды которых пропорциональны синусу (фиг. 56) и косинусу угла между направлением движения транспортного средстаа и выбранными начальными направлениями, эти напряжения поступают на входь 22 арифметических устройств 4, 5. В арифметическом устройстве 4 с определенной цикличностью осуществляется определеаие прира ле шя координаты X по алгоритму
NuX Nu6Ucoc.c5L,где LJ-cos№ - амплитуда напряжения на интервале цикла, пропорциональная COSa;
л X - число ммпульсов, пропорциональное приращению координаты;
N Д S - число импульсов с датчика пути, поступающих на вход АУ за время одного цмкла. 1;аки1У| образом реализуется алгор}Пм
Д Xj Д Si-cosa .Б арифметическом устройстве осуществляется также суммирование пол т1енных приракдакий коорданат в соответств с выражением
x..,-,
1-О
где п - количество циклов определения приращений координат за время движения транспортного средства между двумя отсчетами координат.
В арифметическом устройстве 5 осуществляются аналогичные преобразования по координате У. Коордкнать X, У фиксируются в арифметютеских устройствах в виде двоичного кодд, который выводжся на перфоратор по сигналам блока 6 выдепения дискрет угла. С вторых выходов арифметических устройств 4, 5 медленно меняющиеся напряжекня, пропорциональные синусу и косинусу угла, поступают на блок 6 выделения дискрет утла, с выхода которого 5 гфи изменении угла нап|1авления движения на определенную задатгуго величину (например 4, 8 или 12°) поступает команда на управляющий вход перфоратора 7 и происходит запись на перфоленту с арифметических устройств 4 и 5 значений текущих координат X и У в виде двоичного кода. Таким образом, контур измеряемого у шстка произвольной формы подвергается кусочно-линейной апроксимации по углу (фиг. 4). Коэффициент апроксимацик задается переключателем блока 6 выделения дискрет угла. Выбор требуемого коэффициента определяется конфигурацией измеряемого участка. Для уистков со С31ОЖНОЙ конфигурацией выбирается минимальнал дискретность по углу. После объезда.участ ка по периметру перфолента с информацией о конфигурации у шстка вводится в ЭВМ и обрабатывается по необходимой программе. В частности, .может быть определена площадь участка его перил.етра, осуществлено разбитие участка на загоны опглмальной формы (при проведении сельскохозяйственных работ) и т.д. Арифметические устройства реализуют алгоритмы) / S C05cL ..S.siMd, и суммируюидие результаты прираилении К--5ДЛьХ, i-O , где AS j - приращетше за время щнсла преобразования; ЛХ--,АУ{ - приращен я координат измеряемо го участка. Значения текущих координат X, У, определ ющих конфигурацию поля, фиксируются на л те перфоратора. Непосредственная запись -коор динат X, У на ленту не требует снятия показа ний с планшета и дополнительной обработки 1тформации с целью ее ввода в ЭВМ. Генера тор 8 вырабатывает пилообразное напряжение с периодом равным циклу преобразования пр ращения пути в приращения координат (фиг. 5а). Длительность этого цикла связана с мин мальной дискретностью апроксимации по уту и с дискретностью (ценой) импульсов переме щения, так как необходимо, чтобы за время цшсла угол направления движения транспортного средства не изменился более, чем на ве личину дискретности по углу, и в то же вре мя, в арифметическое устройство за цикл должно полупить число импульсов перемсшеШ1Я достаточное для осуществления преобразования с необходимой точностью. При этом на .-шьную скорость транспортного средства 1{ на максималы ую скорос1ъ при поворотах накладываются определет1ые ограничения. Например, если задаться дискретностью апроксимации по глу Б 3°, то за время одного цикла Тц направление движения транспорта не должно измениться более чем на 3°. При максимальной скорости транспорта на поворотах равной 9 км/ч. т.е. 2,5 м/с и радиусе разворота г 10 м при повороте на 180° транспортное средство пройдет путь длиной i-il-r 30 м и затратит время 30/2,5. 12 сек. За одну секунду транспорт будет менять нацравленне па 15°. Поэтому, чтобы не выйти за дпскретность 3°, за одну секунду должно пройти не .менее пяти циклов преобразования, дпительность цикла составит Тц 1/5 0.2 сек. Если задаться точностью преобразования по пути в 1%, то за время Щ1Кла в АУ должно поступить не менее 100 имn)TibcoB. Это значит, что при ми(тмальной скоросш транспорта в 3,6 км/час (1 м/сек) датчик должен вырабатывать 500 импульсов на метр пути. Максимальное значение напряжения генератора пилы в конце 1и{кла равно 1aкcи 5aльнo возможнсму напряжению с амплитудного детгктора, т.е. напряжению получае;.5ому на выходе амплитудного детектора при а )0 ячя АУ 4 (по координате X) Ю1Н Q 0° для АУ 5 (по координате У). На выхо.т ам :лчтуц1 ого детектора поступает переменное напряжекне с синусно-косипусного устройства .1. амгхтппуда которого пропорциональна синусу (косинусу) угла напраоле шя даижения трансп.нла (фиг. 5G). Амплиту71НЬ й детектор 3 1гтрямляст это напряжение и на его выходе вырабатывается медленно меняющееся (постоянное) напряжение, пропорциональное синусу (косинусу) угла (Фиг. 5в), нагфяжеоие генератора пилы 8 и медленно меняющееся напряжение с ам1ШИ1удного детектора 13 поступают на соотвстствуюише входы схемы 2 сравнения. В момент начала пилы на выходе схемы сравнения появляется потенциал, который снимается в момент равенства напряжения пилы и напряжения, пропоргшонального синусу (косинусу) угла с амплитупного детектора 13. Таким образом на выходе схемы 9 сравнения формируются и - пульсы с периодом цикла Тц, причем ;1лительность этих импульсов пропорциональна синусу (косинусу) тла (фиг. 5г). Эти импульсы поступают на один из входов схемь И 10 и управляют ее работой. На первьш
вход схемы И поступают импульсы с датчика пути (фиг. 5е), которые проходят на выход схемы И только в моменты управляющих импульсов со схемы сравнения (фиг. 5д). Так как число импульсов на первом входе схемы И пропорционально пройденному за время цикла пути, а длительность управляюшрго импульса на втором входе схемы И пропорциональна синусу (косинусу) угла (фиг. 5г), то на выходе схемы И за цикл 1гроходит число импульсов, пропорциональное произведению NAX cos а. Таким образом реализуется алгоритм
.AXj ASicosa
С выхода схемы И импульсы постуцают на вход делителя-нормализатора 11 (фиг. 5д) который усредняет их по периоду и переводит к необходимой единице измерения (например 1 импульс - 1 метр). Импульсы с выхода делителя-нормализатора 11 поступают на вход реверсивного счетчика 12, где .осуществляется их сложение (или вычитание) в соответствии с алгоритмом
х 5:дУ.,-11л
1-1i-Управление работой реверсивного счетчика осуществляет фазовый детектор 14. На его рход поступает переменное напряжение с синусно-косинусного устройства 3. Фаза этого напряжения определяет знак синуса (косинуса) угла. Фазовый детектор 14 при фазе на пряжения, соответствующей положительному синусу (косинусу), вырабатывает команду реверсивному счетчику 12 на сложение приращений координат, а при фазе, соответствующей отрицательному синусу (косинусу), на вычитание координат (фиг. 5ж). При этом обеспечивается регистрация как возрастающих
так и убывающих координат. На выходы переключателя 15 с выходов амплитудного детектора 13, арифметических устройств 4, 5 поступают медленно меняющиеся напряжения, пропорциональные соответственно текущим значениям синуса и косинуса курсового угла. Пороговое устройство 20 срабатывает при значении нагфяжения на его входе, соответствующем sin 45 . При этом при значении курсового угла а
на выход проходит напряжение, пропорциональное синусу а, а при а от 45° до 90° на выход проходит напряжение, пропорциональное косинусу а. Это позволяет достигнуть более высокой чувствительности к изменению угла,
а значит и более высокой точности апроксимации.
Формула изобретения
Устройство для записи конфигурации земель.ных участков, содержащее гироскоп, датчик пути, синусно-косинусное устройство, отличающееся тем, что, с целью повышения точности, в него введены два арифметических устройства, блок вьщеления дискрет угла и перфоратор, при этом вьгходы датчика пути и синусно-косинусного устройства соединены с входами арифметических устройств, одни из выходов которых соединены с перфоратором через блок выделения дискрет угла, а другие выходы - с перфоратором непосредственно.
Источники информации, принятые во внимание при экспертизе 1. Труды Ульяновского СХИ, Механизация, том XIII, вып. IV, стр. 94-98.
2. Авторское свидетельство СССР № 278137, кл. G 01 С 21/00, 1966 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1697267A1 |
| Устройство для определения полярных координат осредненного вектора ветра | 1980 |
|
SU993282A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ —КОД | 1973 |
|
SU409263A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU699535A1 |
, л V f/
/.;708148 /
ПТШ
jnji
