154) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU570482A1 |
| Манипулятор | 1975 |
|
SU515634A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Устройство для ограничения динамических усилий механизмов экскаватора | 1990 |
|
SU1788161A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2005 |
|
RU2279971C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU775850A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
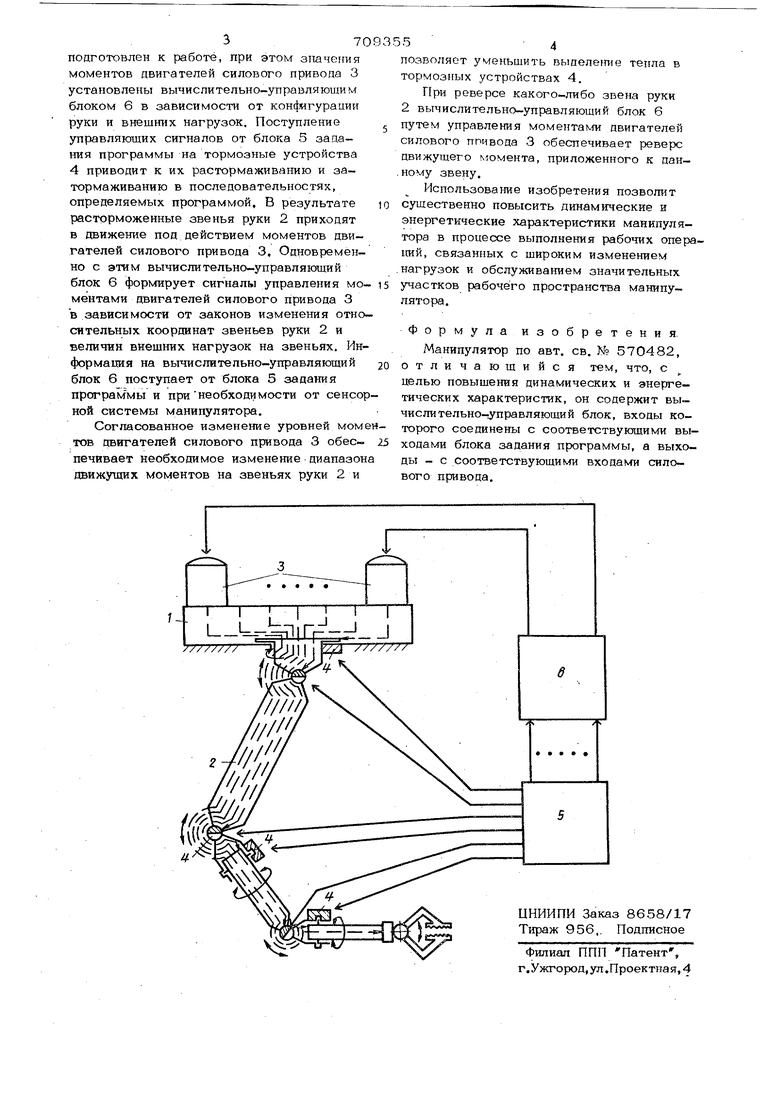
Изобретение относится к области ма- нипуляторостроения и может быть использовано при создании манипуляторов с программным управлением. По основному авт. св. f 570482 известен манипулятор, содержащий мехакическую руку с шарнирно соединенными звеньями, силовой привод, блок задания программы, на механической руке установлены тормозные устройства, подключенные к блоку задания программы, каждое тормозное устройство выполнено в виде гидротормоза с золотниковым блоко кинематически связанным со смежными звеньями и серводвигателем, и устройства реверса силового привода. Известный манипулятор позволяет обе печивать высокую точность отработки заданной траектории. Однако из-за постоян- ства моментов силового привода , при раб те в широком диапазоне нагрузок и обслуживания значительных участков рабочего пространства, манипулятор имеет низкие динамические и энергетические характеристики. Целью изобретения является повышение динамических и энергетических характеристик манипулятора. Сущность изобретения заключается в том, что манипулятор содержит вычислительно-управляющий блок, входы которого соединены с соответствующими выходами блока задания программы, а выходы с соответствующими входами силового привода. На чертежр представлена функциональная схема предлагаемого манипулятора, где 1 - основание, 2 - механическая рука, 3 - силовой привод, 4 - тормозные устройства, 5 - блок задания программы, 6 - вычислительно-управляющи11 блок. Манипулятор работает следующим образом. При включенных двигателях силового привода 3 и заторможенных тормознмх устройствах 4 кинематические передачи звеньев руки 2 натянуты и манипулятор
370
подготовлен к работе, при этом зтичения моментов двигателей силового привода 3 установлены вычислительно-управляюши м блоком 6 в зависимости от конфигурации руки и внешних нагрузок. Поступление управляющих сигналов от блока 5 задания программы на тормозные устройства 4 приводит к их растормаживанию и затормаживанию в последовательностях, определяемых программой, В результате расторможенные звенья руки 2 приходят в движение под действием моментов двигателей силового привода 3, Одновременно с этим вычислительно-управляющий блок 6 формирует сигналы управления моментами двигателей силового привода 3 в зависимости от законов изменения относительных координат звеньев руки 2 и величин внешних нагрузок на звеньях. Информация на вычислительно-управляющий блок 6 поступает от блока 5 задания программы и при необходимости от сенсорной системы манипулятора.
Согласованное изменение уровней моментов двигателей силового привода 3 обеспечивает необходимое изменение диапазона движущих моментов на звеньях руки 2 и
позволяет уменьшить выпелетае тепла в тормозных устройствах 4.
При реверсе какого-либо звена руки 2 вычислительно-управляющий блок 6 путем управления моментами двигателей силового привода 3 обеспечивает реверс движущего кюмента, приложенного к пан.ному звену.
Использование изобретения позволит существенно повысить динамические и энергетические характеристики манипулятора в процессе выполнения рабочих оперций, связанных с щироким изменением
.нагрузок и обслуживанием значительных участков рабочего пространства манипулятора.
Формула изобретения. Манипулятор по авт. св. № 570482, отличающийся тем, что, с целью повыщения динамических и энергетических характеристик, он содержит вычислительно-управляющий блок, входы которого соединены с соответствующими выходами блока задания программы, а выходы - с соответствующими входами силового привода.
