Изобретение относится к области манипуляторостроения, в частности к манипуляторам с программным управлением.
Известные манипуляторы с про-граммным управлением, содержащие механическую руку с шарнирно соединенными звеньями, силовой привод и блок задания программы, имеют плохие динамические характеристики при работе, особенно .на повышенных скоростях.
Цель изобретения - улучшение динамических характеристик манипулятора.
Это достигается за счет того, что на механической руке установлены тормозные устройства, подключенные к блоку задания программ, причем каждое тормозное устройство выполнено в виде гидротормоза с золотниковым блоком, кинематически связанным со смежными звеньями и серводвигателем, и устройства реверса силового привода.
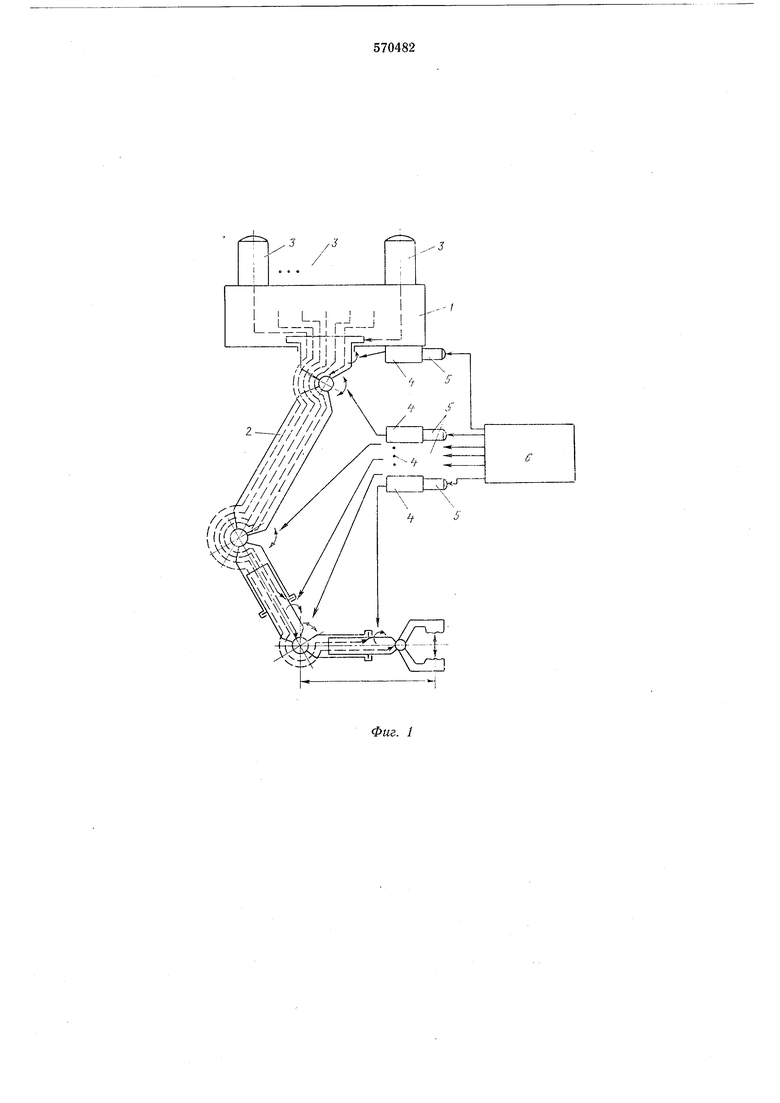
На фиг. 1 показана принципиальная схема манипулятора; на фиг. 2 - принципиальная схема тормозного устройства.
Манипулятор состоит из основания 1, механической руки 2, силовых двигателей 3 с характеристиками источника момента, управляемых тормозных устройств 4, маломощных серводвигателей 5 и блока 6 задания программы.
Силовые двигатели 3, число которых равно числу степеней свободы манипулятора, усталовлены на его основании. Каждый из них системой кинематических передач связан с соответствующим звеном механической руки.
Управляемые тормозные устройства 4, число которых также равно числу степеней свободы манипулятора, установлены в щарнирах его звеньев и обеспечивают управляемое затормаживание и растормаживание их относительного движения. Управление тормозными устройствами 4 обеспечивается маломощными серводвигателями б, также устанавливаемыми .в шарнирах звеньев.
Блоком 6 задания программы осуществляется программное управление серводвигателями 5.
Манипулятор работает следующим образо.м.
Включаются силовые двигатели 3, которые при заторможенных устройствах 4 обеспечивают натяжение кинематических передач приводов звеньев. Таким образом, кинематическая цепь, ведущая к каждому звену руки 2, оказывается «взведенной и подготовленной к работе. При подаче управляющих сигналов на серводвигатели 5 от блока 6 задания программы осуществляется растормаживание тормозных устройств 4 манипулятора в последовательностях, определяемых программой. В результате расторможенные звенья руки 2 приходят в движение под действием моментов силовых двигателей 3.
При реверсе какото-либо из управляющих серводвигателей 5 осуществляется реверс соответствующего ему силового двигателя 3.
На фиг. 2 дана конструкция управляемого тормозного устройства 4 и иллюстрируется принцип работы одной степени свободы манипулятора.
Элементами 7 и 8 для простоты понимания представлена кинематическая передача от силового двигателя к звену, обладающая упругостью и имеющая зазор (в реальной конструкции это, как правило, набор зубчатых передач). Кроме того, схема включает гидротормоз 9, золотниковый блок 1,0, устройство 11 реверса системы и смежные звенья 12 и 13 механической руки.
В данном конструктивном варианте тормозного устройства 4 система работает следующим образом.
Включение силового двигателя 3 обеспечивает .натяжение элементов 7 и 8 кинематической цепи. При вращении серводвигателя 5 осуществляется вывинчивание золотника блока 10 из резьбовой втулки, жестко укрепленной йа валу гидротормоза 9. Это перемещение золотника растормаживает гидротормоз 9, специально спрофилированный кулачок которого, взаимодействующий с плунжерами, поворачивается под действием момента силового двигателя 3 -- осуществляется движение по
рассматриваемой степени свободы, при этом происходит относительное перемещение смелсных звеньев 12 и 13 манипулятора.
Вращение кулачка передается резьбовой втулке, которая возвращает золотниковый блок 10 в нейтральное положение. При этом золотник запирает рабочую жидкость в полостях плунжеров, чем обеспечивается торможение.
Реверс системы осуществляется устройством И при изменении направления вращения серводвигателя 5. При этом .золотниковый блок 10 воздействует на устройство 11, включая силовой двигатель 3 в ту или иную сторону.
Формула изобретения
. 1. Манипулятор, содержащий механическую руку с щариирно соединенными звеньями, силовой нривод и блок задания программы, отличающийся тем, что, с целью улучщения динамических качеств, на механической руке уста.новлены тормозные устройства, подключенные к блоку задания программы.
2. Манипулятор по п. 1, отличающийся тем, что каждое тормозное устройство выполнено в виде гидротормоза с золотниковым блоком, кинематически связанным со смежными звеньями и серводвигателем, и устройства реверса силового привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1976 |
|
SU709355A2 |
| Манипулятор | 1975 |
|
SU515634A1 |
| Гидромеханический усилитель | 1975 |
|
SU823662A1 |
| Исполнительный орган робота | 1982 |
|
SU1060462A1 |
| Электрогидравлический усилитель | 1972 |
|
SU643672A1 |
| Электрогидравлический следящий привод | 1974 |
|
SU481713A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |

Фиг. 1
