Изобретение относится к подъемным установкам, а именно к системам автоматического управления электроприводом постоянного тока шахтных подъемных машин, может быть использовано в системах автоматизации шахтных подъемных установок и является усовершенствованием изобретения по авт. св. № 887403.
Целью изобретения является повышение надежности.
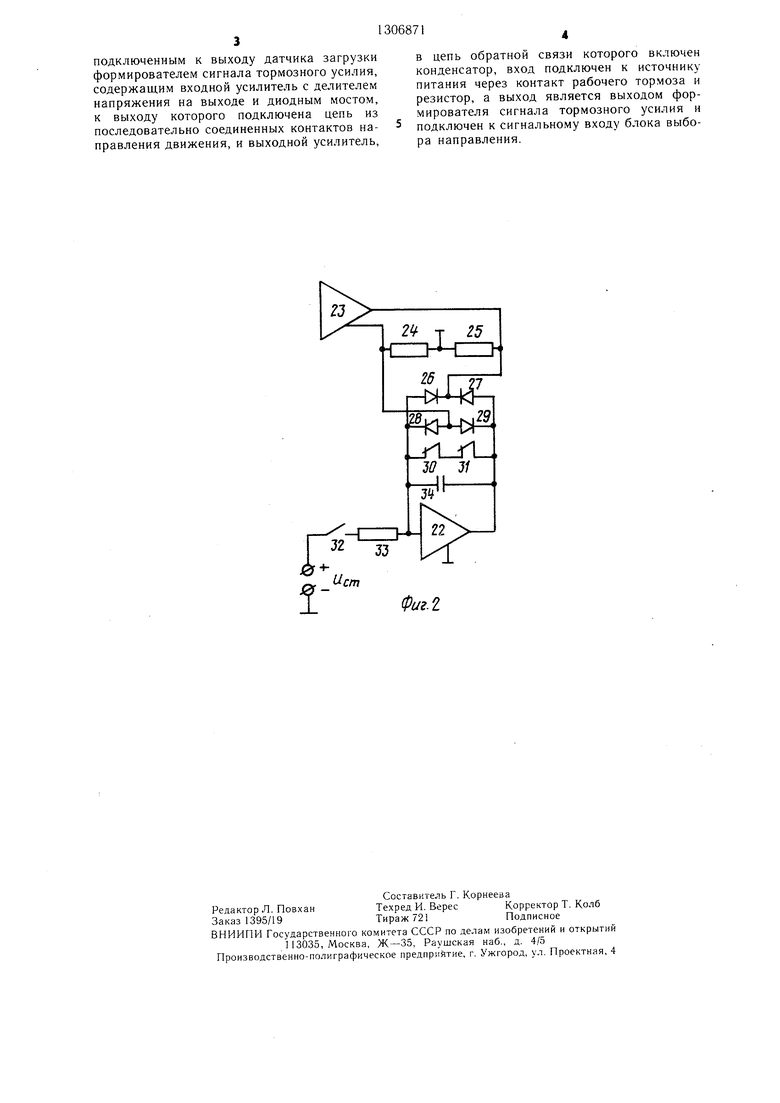
На фиг.1 показана функциональная схема устройства для управления электроприводом шахтной подъемной машины; на фиг.2 - принципиальная электрическая схема датчика тормозного усилия.
Устройство (фиг.1) состоит из последовательно соединенных блока 1 пуска, за- датчика 2 программы движения, регулятора 3 скорости, формирователя 4 статических хаг рактеристик, ограничителя 5, регулятора 6 тока якоря, двигателя 7, тиристорного преобразователя 8, датчика 9 тока якоря, выход, которого связан через элемент 10 сравнения с входо 1 регулятора 6 тока якоря. Второй выход формирователя 4 статических характеристик связан через другой элемент 11 сравнения с последовательно соединенными регулятором 12 тока возбуждения и тиристорным преобразователем 13. Датчик 14 тока возбуждения обмотки 15 возбуждения двигателя 7 связан с входом регулятора 12 тока возбуждения. Выходы датчиков 16 загрузки, установленных в погрузочном пункте, связаны с входом датчика 17 тормозного усилия, выход которого соединен с одним из входом блока 18 выбора направления движения, второй вход которого соединен с выходом блока 1 пуска, а вьЕход - через третий элемент 19 сравнения с входом формирователя 4 статических характеристик. Выход датчика 20 скорости, связанного с валом двигателя 7, связан через элемент 21 сравнения с входом регулятора 3 скорое ..
Датчик 17 состоит из интегрирующего усилителя 32, узла регулируемого ограничения интегратора, состояш.его из усилителя 23 с гальванически развязанным входом и выходом сопротивлений 24 и 25, диодного моста из диодов 26-29. В цепь обратной связи усилителя 22 включены последовательно соединенные контакты 30 и 31, соответственно «Вперед и «Назад, а к его входу через контакт 32 рабочего тормоза и резистор 33 подключен стабилизированный источник питания (Ucr). В цепь обратной связи усилителя 22 включен конденсатор 34. Выходной сигнал усилителя 22 определяет требуемый закон изменения движущего усилителя и формируется следующим образом.
При поступлении сигнала на движение подъемной машины размыкается контакт 30 или 31 в зависимости от направления движения и замыкается контакт 32, подключая на вход усилителя 22 источник питания UCT.
На усилителе 22 наблюдается линейное нарастание напряжения до уровня ограничения, определяемого напряжением с усилителя 23. Этот уровень напряжения пропорционален статической нагрузке. Изменяя параметры схемы, а именно значения конденсатора 34 и резистора 33 можно обеспечить требуемый закон изменения Рдь и до биться равенства Ьт в процессе растор- маживания подъемной машины, а значит устранить неблагоприятные воздействия на механическую часть привода подъемной машины.
Предлагаемое устройство работает следующим образом.
С выхода блока подается сигнал начала движения. Задатчик 2 программы движения начинает формировать программу движения подъемного сосуда в функции времени. Одновременно с входным сигналом на вход блока 18 поступает сиг-нал с датчика- 17 тормозного усилия, максимальный уровень которого определяется сигналом с датчиков 16 загрузки, а те.мп нарастания (время нарастания) - параметрами схемы датчика 17. На выходе блока 18 формируется сигнал, полярность которого определяется заданным направлением движения, величина - приложенным статическим моментом, а темп нарастания - параметрами тормозного устройства подъемной машины.
На выходе блока формирователя статических характеристик формируются сигналы
управления током якоря и током возбуждения.
В результате этого происходит нарастание тока возбуждения и тока якоря подъемного двигателя и, следовательно, нарастание момента на валу подъемного двигателя.
При этом любой момент времени в процессе растормаживания подъемной машины обеспечивается равенством FT - F, что обеспечивает подхватывание груженого сосуда, исключая его просадку и неблагоприятное воздействие разности усилий 1 - Fy на механические передачи привода, так как эта разность в процессе растормаживания поддерживается за счет датчика тормозного усилия равной нулю.
В дальнейшем на разгон и замедление
подъемной машины дополнительный сигнал, сформированный датчиком тормозного усилия, не влияет, так как при выходе из зоны действия датчиков 16 загрузки он снимается, а регулятор 3 скорости поддерживает величину скорости на уровне, который
задается задатчиком 2 программы движения.
Формула изобретения
Устройство для управления электроприводом шахтной подъемной машины по авт. св. № 887403, отличающееся тем, что, с целью повышения надежности, оно снабжено
подключенным к выходу датчика загрузки формирователем сигнала тормозного усилия, содержащим входной усилитель с делителем напряжения на выходе и диодным мостом, к выходу которого подключена цепь из последовательно соединенных контактов направления движения, и выходной усилитель.
в цепь обратной связи которого включен конденсатор, вход подключен к источнику питания через контакт рабочего тормоза и резистор, а выход является выходом формирователя сигнала тормозного усилия и подключен к сигнальному входу блока выбора направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1237593A2 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU878720A1 |
Изобретение относится к области электропривода, а именно к области систем автоматического регулирования электропривода шахтных подъемных машин, может быть использовано в системах автоматизации шахтных подъемных установок. Целью изобретения - повышение надежности за счет снижения износа механического оборудования привода подъемной установки. Устройство регулирования электропривода рудничного подъема по системе тиристорный преобразователь-двигатель с реверсом поля содержит последовательно соединенные блок 1 пуска, задатчик 2 программы движения, регулятор 3 скорости, блок 4 формирования статических характеристик, ограничитель 5, регулятор 6 тока якоря, регулятор 12 тока возбуждения, тиристорные преобразователи 8, датчики 16 загрузки сосудов, формирователь 17 тормозного усилия, блок 18 выбора направления движения. Устройство обеспечивает снижение динамических нагрузок на механические передачи. 2 ил. е cffus-i ISO
ZS
ш 27
ай1н
Фиг..
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
