1
Изобретение относится к области машиностроения и может быть использовано для автоматизации основных и всномогательных операций в промышленности.
Ii3BecTHb манипуляторы с нрограммным унравлением, которые широко исиользуются для целей автоматизации операций загрузки (выгрузки) оборудования, а также для автоматнзации некоторых технологических операций, например таких, как окраска, сварка и т. п.
11звестные конструкции манипуляторов содержат механическую руку с несколькими степенями свободы и устаиовлеииые на основании силовые двигатели иривода, включающего систему механических иерсдач, гидротормозные устройства, выполненные в виде двух сообш;аюш,нхся через золотник камер, первая из которых устаповлена между смежными HiapHHpHO соединенными звеньями руки, и маломошные серводвигатели, уиравляюшие золотннками по сигналам программного устройства.
Недостатком известных маинпуляторов является то, что прн изменении нанравлення движения в какой лнбо из приводов, кииематичесКИе иередачн соответствующей цеии нересопрягаются, и резко с ударом выбираются зазоры. Это приводит к быстрому износу кинематических передач и к сиижению точности выполнения заданных движений.
С целью постоянного выбора зазоров в механнческих передачах и исключеиня их иересопряження при реверсе в предлагаемом устройстве гидротормозное устройство каждой стененн свободы снабжено аккумулятором давления, вторая камера гидротормозного устройства установлена на основании и кинематически связана с снловым двигателем, а система механнческих передач, первая камера гидротормозного устройства, аккумулятор давления ,и вторая камера образуют замкнутый контур. Золотник )1 маломощный серводвигатель каждой стеиенн свободы установлены на основанн и кинематнческн связаны с силовым двигателем. Камеры гидроторМозных устройств всех степеней свободы подключены к общей магистрали.
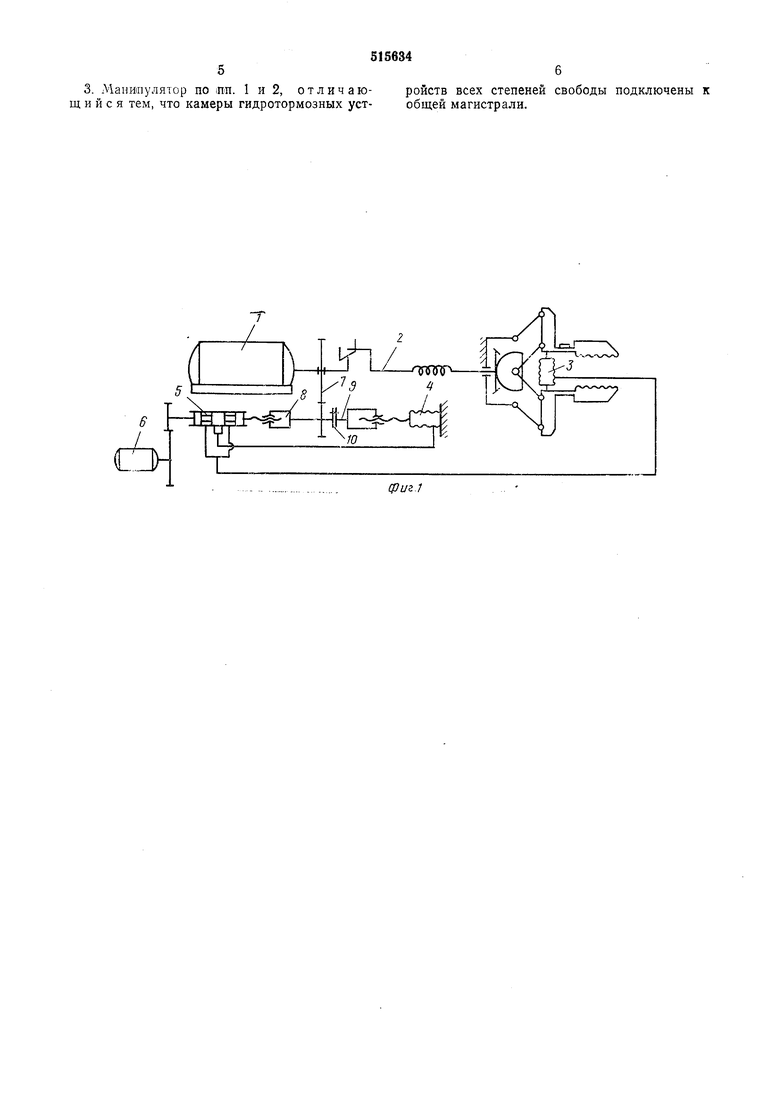
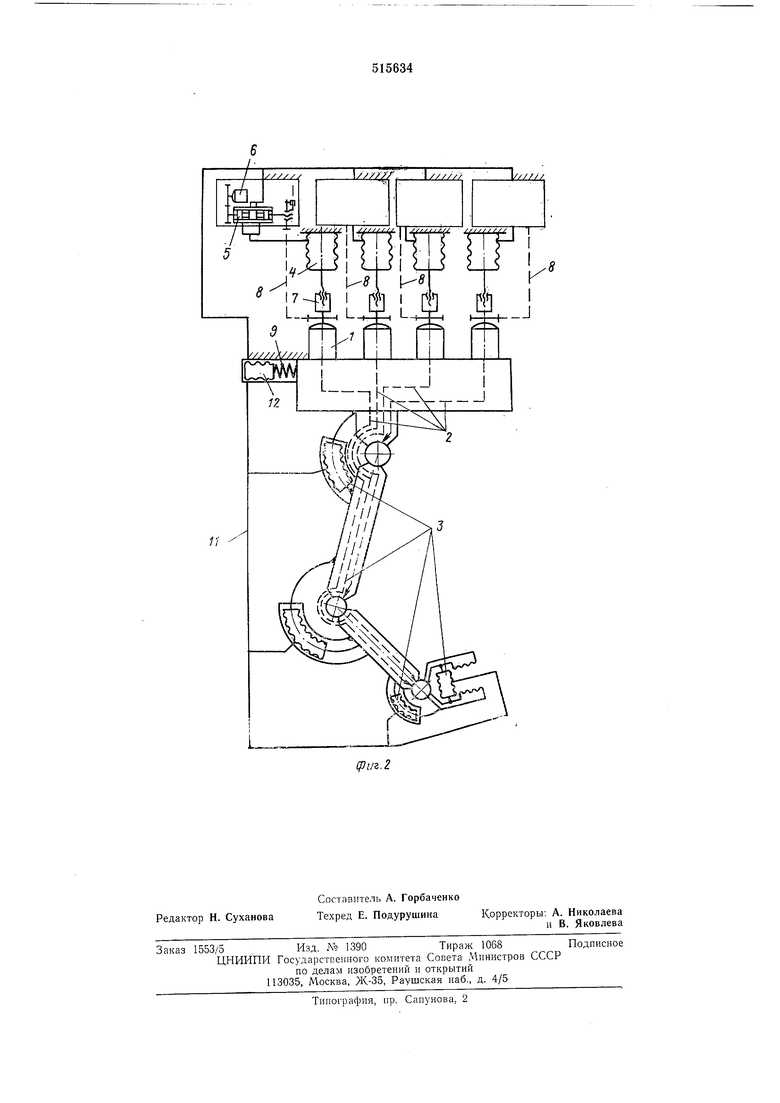
На фиг. 1 представлена коиструктивиая схема иривода одной стеиени свободы манипулятора; на фиг. 2 - прпициииальная схема манннулятора.
Прнвод каждой стеиени свободы манипулятора содержит силовой двигатель 1, цеиь 2 книематическнх нередач, имеющую зазоры и
уНруГОСТЬ, гидротормозное устройство, ВЫПОЛнеииое из двух независимых упругих камер 3 и 4 (С)льфонов), золотннка 5 и маломощ} ого серводвигателя 6. Камера 3 гидротормозного устройства установлена между шарннрно соединенными звеньями руки. Камера 4 устаиовлена на основании к кинематически цеиью 7 связана с ашовым двигателем. Обе камеры сообщаются через золотник 5, который .кинематически передачей 8 также связан с силовым двигателем 1. Золотник 5 и серводвигатель 6, образующие управляющую систему, установлены на основании. Кинематическая цепь (передача 8) образует цепь обратной связи.
Кинематические цепи 2 и 7 от силового двигателя 1 к упругим камерам 3 и 4 обеспечивают перемещение камер в противоположные стороны, т. е. при удлинении одной из них вторая сжимается. Передаточные отношения цепей (или площади сечения камер) подобраны так, чтобы обеспечить равенство объемов вытесняемой и поступающей жидкости.
В гидравлическую цепь гидротормозного устройства включен аккумулятор давления. На фиг. 1 роль аккумулятора давления выполняет сильфон 4. Его поджим обеспечивается торсионом 9, а регулировка - поворотом фланца 10. Таким образом, система механических передач, камера 3 гидротормозного устройства, аккумулятор давления, составленный из торсиона 9 и поворотных фланцев 10, и камера 4 образуют замкнутый контур. В его гидравлической части перетечка жидкости допускается только при открытом золотнике 5.
Все степени свободы могут быть выполнены аналогично фиг. 1. Но при этом количество аккумуляторов давления и гидромагистралей, подводимых к механической руке, будет равно числу ее степеней свободы.
Для упрощения конструкции и уменьшения количества используемых аккумуляторов камеры 4 и 3 гидротормозных устройств подключены к общей гидромагистрали 11 (фиг. 2). Давление в магистрали и соответственно натяжение всех кинематических цепей обеспечивается за счет установки одного аккумулятора 12 давления.
Предлагаемый манипулятор работает еледующим образом.
Цепь 2 кинематических передач от силового двигателя 1 к соответствующему шарниру руки и гидромагистраль, связывающая независимые камеры 3 и 4, образуют замкнутый контур, в котором действует момент натяжения, пропорциональный давлению аккумулятора 12 и площади сечения камер. В результате действия этого момента в цепи кинематических передач от двигателя 1 до соответствующего шарнира выбираются люфты и зазоры. Момент натяжения рассчитывается так, чтобы стыки в кинематических передачах не раскрывались под действием нагрузки, приложенной к руке манипулятора.
Силовые двигатели 1 постоянно развивают активный момент, который, однако, не приводит к перемещению руки при нейтральном положении золотников 5 из-за того, что золотник в данном положении не допускает перетечку рабочей жидкости из камеры 4 в камеруз.
При подаче сигналов управления на серводвигатель б от блока задания программы (не показан) золотник 5 смещается в осевом направлении, каналы открываются, и двигатель 1 через кинематическую цепь 2 осуществляет перемещение в соответствующем шарнире. Перемещение кинематических передач передается также через цепь 7 на камеру 4. Объем вытесненной из камеры 4 жидкости поступает в камеру 3 соответствующего шарнира. Одновременно передача 8 обратной связи передает движение золотнику 5, который перекрывает гидромагистраль между камерами 3 и 4. Система затормаживается.
При реверсе силового двигателя 1 движение будет осуществляться в противоположную сторону, однако пересопряжение кинематических
передач не произойдет в силу действия постоянного по направлению момента натяжения, развиваемого аккумулятором 12.
Таким образом, система обеспечивает дозирование перемещения по каждой степени свободы при постоянном натяжении кинематических цепей и отсутствии пересопряжепия в передачах. При этом камеры 3 и 4 и гидромагистраль 11 одновременно являются как тормозным устройством (за счет запрещения перетечек ра-бочей жидкости в магистрали с помощью золотника 5), так и устройством для натяжения кинематических передач (за счет обеспечения аккумулятором 12 повышенного давления рабочей жидкости).
Формула изобретения
1. Манипулятор, содержащий механическую руку с несколькими степенями свободы и установленные на основании силовые двигатели привода, включающего систему механических передач, гидротормозные устройства, выполненные в виде двух сообщающихся через золотник камер, первая из которых установлена между смежными шарнирно соединенными звеньями руки, и маломощные серводвигатели, управляющие золотниками по сигналам программного устройства, отличающийся тем, что, с целью постоянного выбора зазоров в механических передачах и исключения их пересопряжения при реверсе, гидротормозное устройство каждой степени свободы снабжено аккумулятором давления, вторая камера гидротормозного устройства установлена на основании и кинематически связана с силовым двигателем, а система механических передач, первая камера гидротормозного устройства, аккумулятор давления и вторая камера образуют замкнутый контур.
2. Манипулятор по п. 1, отличающийс я тем, что золотник и маломощный серводвигатель каждой степени свободы установлены на основании и кинематически связаны с силовым двигателем.
3. Манипулятор по mn. 1и2, отличающийся тем, что камеры гидротормозных устройств всех степеней свободы подключены к общей магистрали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU570482A1 |
| Способ управления манипулятором | 1979 |
|
SU806404A1 |
| Исполнительный орган робота | 1982 |
|
SU1060462A1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
фuz1
11
I//////
