(54) ПИТАТЕЛЬ ДЛЯ ЗАГРУЗКИ СЫПУЧИХ МАТЕРИАЛОВ
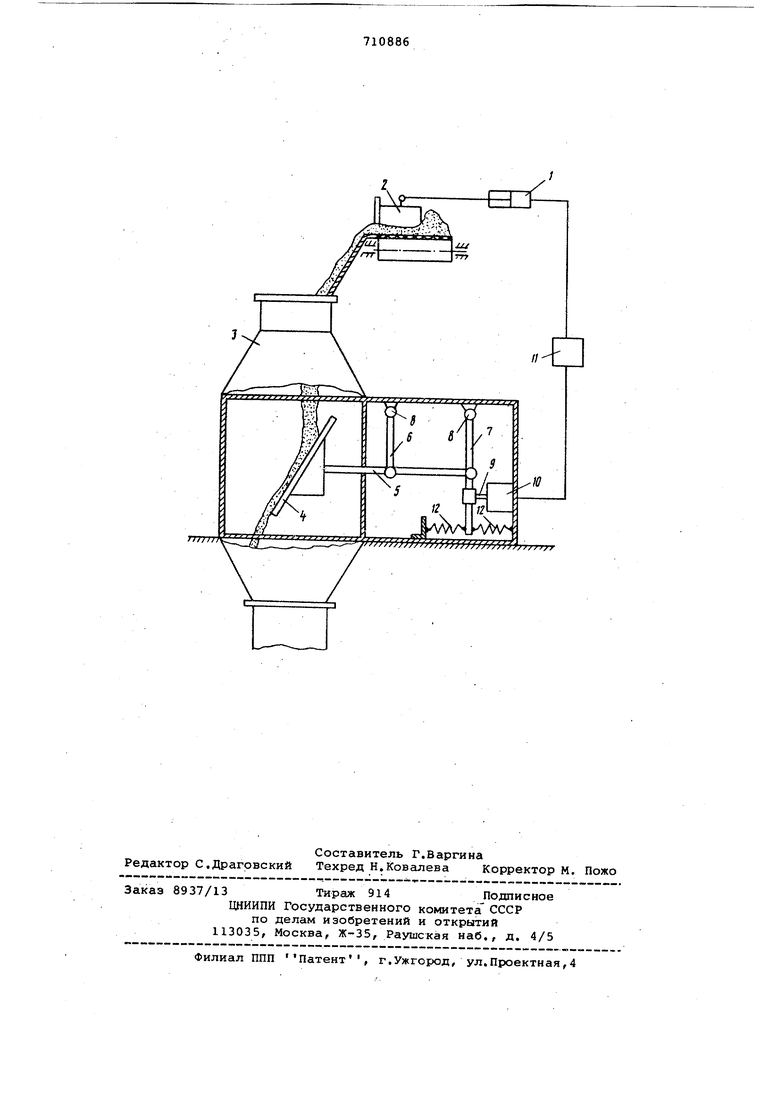
На чертеже представлена структурная схема данного питателя.
Питатель содержит исполнительный механизм I, связанный с подающим органом 2, формирователь потока 3, наклонный потокочувствительныЯ элемент датчика расхода 4, закрепленный на одном из концов горизонтально установленного рычага 5, вертикальную подвеску 6 и вертикальный рычаг 7, которые шарнирно прикреплены в верхней части к неподвижным опорам 8, шток 9, соединяющий вертикальный рычаг 7 и преобразователь датчика расхода 10, регулятор 11, пружины 12 одинаковой жесткости, жестко закрепленные на корпусе. Вертикальная подвеска б шарнирно прикреплена нижней частью к средней части горизонтального рычага 5, к другому концу которого шарнирно прикреплен вертикальный рычаг 7. При этом шарнирные крепления рычагов 5, 7 и подвески 6 образуют в вертикальной плоскости прямоугольник, нижний конец вертикального рычага 7 связан с установлеHfcJMH соосно по обе его стороны пружинами одинаковой жесткости, жестко закрепленными на корпусе. Преобразователь датчика расхода 10 установлен между нижним концом вертикального рычага и местом его крепления к горизонтально установленному рычагу 5
Питатель работает следующим образом.
Исходный сыпучий материал подают подающим органом 2, который перемещается с помощью; исполнительного механизма 1, в формирователь потока
3,который сглах ивает флуктуации потка и направляет его в строго определенную точку наклонного потокочувствительного элемента датчика расхода
4,материал,, ударяясь о потокочувствтельный элемент, соскальзывает в перерабатывающий аппарат.
Возникающий момент измеряется преобразователем датчика расхода 10 который подает на регулятор 11 сигнал, пропорциональный текущему значению производительности. Это значение сравнивается в регуляторе 11 сигналом, пропорциональным заданном значению производительности.
Далее регулятор вырабатывает соответствующее регулирующее воздействие, поступающее на исполнительный механизм 1, перемещающий подаюЕДИй орган 2 до тех пор, пока значения текуще производительности и заданной не совпадают.
Нежелательными, с точки зрения возникновения погрешностей, являются вертикальные силы, возникающие как от веса движущегося по потокочувствительному элементу датчика расхода 4 материала, так и от веса налипшего на нем материала.
При движении материала коэффициент трения, влияюгций на скорость его прохождения, а следовательно на показание веса/ меняется случайным образом. Соответственно вес материала на потокочувствительном элементе датчика расхода 4 при постоянном его расходе будет различным.
Влияние вертикальных сил исключается при введении в питатель рычажной системы, состоящей из вертикальной подвески 6 и вертикального рычага 7, шарнирные крепления которых образуют в вертикальной плоскости прямоугольник, и двух пружин 12 одинаковой жесткости, установленных соосно по обе стороны вертикального рычага 7. В какой бы точке горизонтального рычага 5, в том числе и на потокочувствительном элементе датчика расхода 4, не была приложена вертикальная сила, она не сможет вызвать поворот вертикального рычага 7 вокруг неподвижной шарршрной опоры 8 и тем самым воздействовать на преобразователь датчика расхода 10. Это обусловлено тем, что любое перемещение рычажной системы в ту или иную сторону привело бы к повороту вертикальной подвески 6 и вертикального рычага 7 вокруг неподвижных шарнирных опор 8 и одновременно к подъему горизонтального рычага на некоторую высоту, но сохраняющего горизонтальное положение ввиду того, что длина вертикальной подвески 6 равна участка вертикального рычага, заключенного между шарнирами. Но так как это приводит к нарушению условия равновесия Дирихле, заключающегося в том, что система стремится занять положение равновесия с наименьшей потенциальной энергией, то вертикальная сила вернет всю рычажную систему в прежнее нижнее положение.
Применение двух пружин 12 растяжения одинаковой жесткости, установленных соосно по обе стороны вертикального рычага 7 и действующ1-Х з разные стороны, исключает влияние погрешностей, возникающих вследствие изменения натяжения при воздействии внешних факторов. Эти погрешности равны по величине и противоположно направлены, что приводит к их взаимной компенсации.
. При первоначальной настройке при помощи пружин добиваются вертикального положения вертикального рычага 7. При этом не имеет значения, в отличие от применения одной пружины, на какую величину предварительно
0 растянуты пружины,так как их жесткость остается постоянной, а силы натяжения взаимно компенсируются. Это способствует повышению точности загрузки вследствие исключения одной из точных операций по настройко. При наличии вибрации в месте уста новки питателя и флуктуациях потока материала пружины оказьшают некоторое демпфирующее действие, уменьшая высокочастотную составляющу сигнала преобразователя датчика рас.хода, что приводит в конечном итоге к более стабильной загрузке. Предлагаемый питатель позволяет повысить его производительность благодаря уменьшению величины действующих сил (при прочих равных геометрических параметрах) ,так как исключаетс влияние силы веса материала, движущегося по наклонному потокочувствительному элементу. Следовательно тому же измеряемому моменту будет соответствовать значительно больший расход сыпучего материала. Повышение производительности достигается также перемещением преобразователя датчика расхода вниз вдол вертикального рычага. Вследствие это го изменяется соотношение расстояний от линии действия горизонтальной составляющей измеряемого усилия и из мерительной оси преобразователя датчика расхода, до шарнирных опор, что приводит к уменьшению выходного сигн ла преобразователя датчика расхода при том же усилии. Следовательно, предел измерения увеличивается, и пр изводительность питателя путем соответствующего задания регулятору может быть повЕлиена. Кроме того, повышение производительности обеспечивается наличием двух пружин растяжения, расположенных соосно по обе стороны вертикального рычага. При увеличении жесткости пружин на одинаковую величину исключается влияние на нуль преобразователя датчика расхода,так как усили пружин равны и противоположно направ лены. Чем больше жесткость пружин, тем большее усилие может скомпенсиро вать пружина, противодействующая усилию. Следовательно, предел измерения преобразователя датчика расхода увеличивается и, соответственно, может быть повышена производительность . Формула изобретения Питатель для загрузки сыпучих материалов, содержащий исполнительный механизм, связанный с подающим органом, формирователь потока, наклонный потокочувствительный элемент датчика расхода, закрепленный на одном из концов горизонтально установленного рычага, связанный с его выходом преобразователь датчика расхода, управляющий регулятором, выход которого связан с исполнительным механизмом, отличающийся тем, что, с целью повышения точности загрузки и увеличенияпроизводительности, он снабжен шарнирно прикрепленными в верхней части к неподвижным опорам вертикальным рычагом и вертикальной подвеской, шарнирно прикрепленной нижней частью к средней части горизонтального рычага, к другому концу которого шарнирно прикреплен вертикальный рычаг, связанный с установленными соосно по обе его стороны двумя пружинами одинаковой жесткости, жестко закрепленными на корпусе, причем преобразователь датчика расхода установлен между нижним концом вертикального рычага и местом его крепления к неподвижной опоре, Источники информации, принятые во внимание при экспертизе 1,Патент США № 3232486, кл, 225-55, 01,02,66. 2.Авторское свидетельство СССР по заявке № 2411596/11,кл.В 65 G 65/30, 14.10.76.
НЗ

| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель для загрузки сыпучих материалов | 1978 |
|
SU712339A1 |
| Безбункерное загрузочное устройство для сыпучих материалов | 1977 |
|
SU745811A1 |
| Массовый расходомер | 1982 |
|
SU1120167A1 |
| Устройство для контроля крупности сыпучих материалов | 1981 |
|
SU1012103A1 |
| Измельчитель хрупких материалов | 1990 |
|
SU1763006A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| ВЕРХНИЙ ЛОТКОВЫЙ ПИТАТЕЛЬ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2179190C2 |
| Установка для сушки несгораемых пескообразных материалов | 1989 |
|
SU1719833A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| САМОЗАГРУЖАЮЩИЙСЯ РАЗБРАСЫВАТЕЛЬ УДОБРЕНИЙ | 2008 |
|
RU2363133C1 |