1
Изобретение касается измерительной техники и используется для контроля неравномерности хода вращающихся валов, роторов, осей, установленных в подшипниковых опорах качения.
Известны устройства для измерения нестабильности мгновенной скорости вращения, содержащие датчик, преобразователь и блок регистрации,которые предполагают насадку на исследуемый вал подвижного элемента дагшка 1 ..
Однако применение этих устройств возможно только для валов, доступ к которым открыт, снижение точности измерения из-за изменения момента инерции вращающейся системы и внесения дополнительньк моментов, делает эти устройства непригодными для измерения малоинерционных валов. Система требует дополнительной балансировки после, установки датчика. Измерение нельзя проводить в рабочих условиях при работе объекта исследования вместе с другими элементами системы.
Наиболее близким по технической сущности к предложенному является датчик инерционнего типа, содержащий два диска. Один легкий, измерительный диск насажен на исследуемый вал. Второй тяжелый, инерционный диск развязан относительно вала за счет высоких щарикоподашпников и вращается со средней скоростью вращения вала. Угловые колебания дисков один относительно другого с помощью фотодатчика преобразуются в электрический сигнал, который поступает в электронный преобразователь. Преобразователь включает в себя
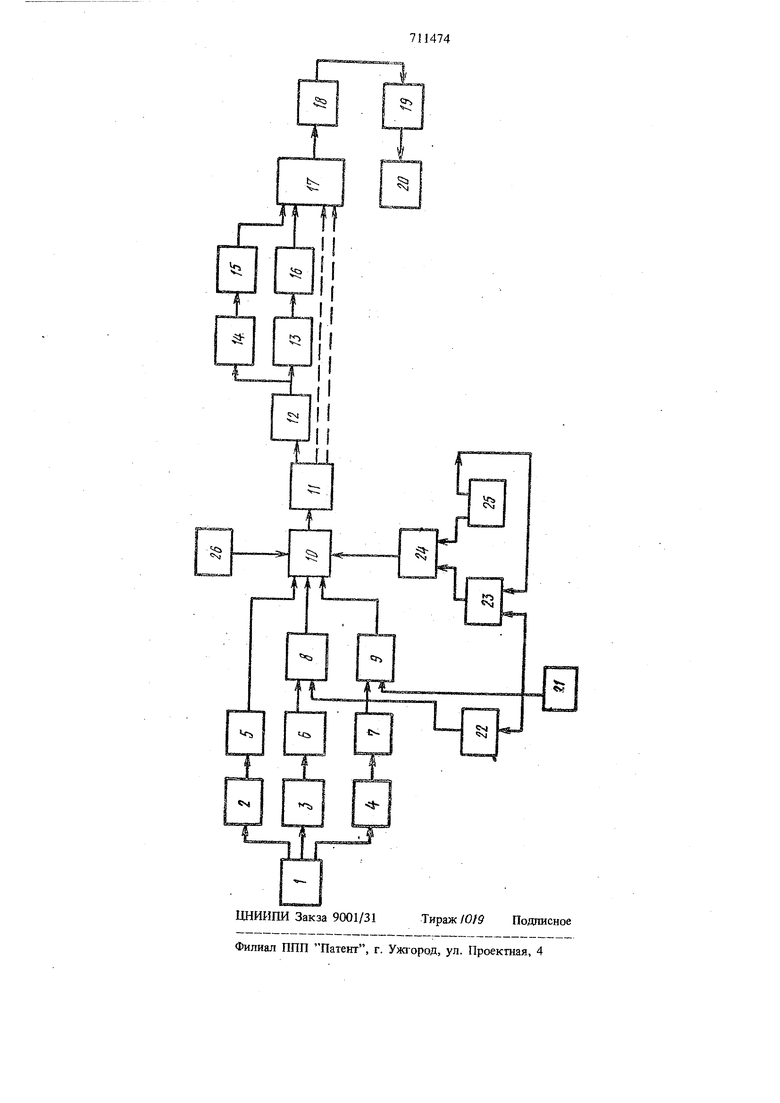
o последовательно соединенные дифференцирующее звено, делитель, первый и второй усилитель, выходной сумматор, третий усилитель и блок регистрации. Прибор имеет вспомогатель гую цепь из фотодатчика синхронирующих импуль5сов, выход которого соединен через импульсный усилитель с входом сумматора, служащую для обозначения на экране блока регистрации длительности оборота, а также фильтр, включаемый в цепь обратной связи второго усилителя с помощью .переключателя. Прибор позволяет измерять мгновенное значение неравномерности хода вращающихся валов 2. 371 Цель изобретения - увеличение диапазона и повышение точности измерения малоинерщ1онных валов. Это достигается тем, что устройство, содерх а1цее дифференцирующее звено, три усилителя, выходной сумматор, фильтр и блок регистрации, снабжено закрепленными на йорпусе объекта измерения в трех взаимно перпендикулярных направлениях осевым вибропреобраЬователем, ось чувствительности которого па-раллельна оси вала, и двумя радиальными вибронреобразователями, первым и вторым блоками умножения, подключенными через усилители к выходам радиальных внбропреобразователей, последовательно соединенные генератор базовой частоты и фазосдвигающее звено, выходы которых подключены к вторым входам блоков умножения, задатчиком дефектов опор качения, блоком перестройки частот, входы которого подключены к выходам генератора базовой частоты и задатчика дефектов опор качения, третьим блоком умножения, входы которого подключены к выходам блока перестройки частоты и задатчика дефектов опор качения, зздатшком нагрузок опоры, сумматором дефор мации, каждый из четырех входов которого подключен к выходам блоков умножения и к выходу задатчика нагрузок опоры, а пятый вхо сумматора подключен к выходу осевого вибропреобразователя через усилитель,. многоотводной схемой задержки с числом отводов по числу тел качения опоры, однотипными цепями, каждая из которых содержит последовательно - соединенные пороговьш элемент, вход которого подключен к соответствующему отводу схемы задержки, а выход соединен с дополнительно введенными, последовательно, вюдоченными квадратором и вторы м нормирующим усилителем, степенной преобразователь и первый нормирующий усилитель. Соответствующие выходы первого и второго нормирующих усилителей соединены с входами выходного сумматора. На чертеже изображена структурная схема предложенного устройства. Схема устройства включает объект I исследования, осевой вибропреобразователь 2, радиал ные вибропреобразователи 3, 4, усилители 5, 6 7, первый и второй блоки 8, 9 умножения, сум матор 10 дчформадии, схему 11 задержки с чи лом отводов по числу тел качения опоры, пороговый элемент 12, степенной преобразователь 13, квадратор 14, первый и второй нормирующие усилители 15, 16, выходной сумматор 17 фильтр 18, дифференцирующее звено 19, блок 20 регистрации, генератор 21 базовой частоты, фазосдвигающее звено 22, блок 23 перестройки частоты, третий блок 24 умножения, датчик 25 дефектов опор качения и задатчик 26 нагрузок опоры. Устройство для измерения нестабильности гновенной скорости вращения вала в опорах ачения содержит объект исследования,осеой вибропреобразователь 2 и два радиальных ибропреобразователя 3, 4, последовательно содиненные соответственно с первым, вторым и ретьим усилителями 5-7. Выходы второго и ретьего усилителя 6, 7 соединены с входами ервого и второго блока умножения 8, 9. Вхоы первого и второго блоков умножения 8, 9 оединены с выходом генератора 21 базовой частоты, что на вход первого блока умножения сигнал с генератора 21 поступает через фазосдвигающее звено 22. Выходы первого усилитеяя 5, первого, второго, третьего блоков 8, 9 и 24 умножения,задатчика 26 нагрузок опоры соединены с входами сумматора 10 деформации. Входы третьего блока 24 умножения соединены с выходом блока 23 перестройки частоты и первым выходом задатчика 25 дефектов опор качения. Первый вход блока перестройки частоты 23 соединен с вторым выходом задатчика дефектов 25, а второй вход - с выходом генератора 21, сумматор 10 последовательно соединен со схемой задержки 11. Схема 11 задержки имеет m отводов, где m - число тел качения подщипника опор исследуемого вала. Каждый из выходов схемы 11 задержки соединен с входом одной из однотипных цепей. Входным элементом каждой из однотипных цепей является пороговый элемент 12. Выход порогового элемента 12 соедш1ен с объединенными входами степенного преобразователя 13 и квадратора 14. Степенной преобразователь 13 и квадратор 14 последовательно соединены с первым и вторым нормирующими усилителями 15, 16, Выходы нормирующих усилителей 15, 16, являющиеся выходами однотипных цепей, соединены с входами выходного сумматора 17. Выходной сумматор 17 последовательно соединен с фильтром 18, дифференцирующим звеном 19 и блсжом регистрации 20. Устройство работает следующим образом. Вибропреобразователи 2-4 устанавливаются на корпусе исследуемого объекта. Электрические сигналы с выходов вибропреобразователей 2-4 проходят через усилители 5-7. Соотношения между коэффи1щентами усиления усилителей 5-7 определяются конструктивными параметрами щарикоподщипниковых опор. Множительные звенья 8 и 9 осуществляют операцию перемножения сигналов, пропорциональных вибрации .объекта. 1 исследования в радиальных Направлениях и синусоидального базового сигнала с генератора 21, изменяющегося с частотой вращения сепаратора подшипников опор исследуемого вала. Фазосдвигающее звено 22, 5 стоящее между выходом генератора 2 базового сигнала и входом первого блока 8 умно жения, обеспечивает подачу сигналов с генератора 21 на входы блоков умноже}1-ия 8, 9 со сдвигом по фазе 7г/2. Чтобы yiecTb влияние условий нагружения опор вала, в устройство введен задатчик 26 нагрузок опоры, постоянное напряжение на выходе которого пропорци онально постоянной составляющей деформации тел качения подшипников. Для влияния дефектов базовой дорожки колец подшип гиков в схему введен задатчик дефектов 25 опо качения. Ин формация о дефектах подшипнико является, априорнойИ может быть после диагностических исследований или статистической обработки результатов исследования дефектов) поднгипникон. Общепринятым методом исследования является представление отклонений формы беговой дорожки от идеаль ной в виде рядов Фурье. Преобладающий дефект беговой дорожки характеризуется его ам плитудой и индексом формы. Так, для преобладающей овальности беговых дорожек индекс формы равен двум, для трехгранности - трем и тл. Напряжение электрического сигнала на первом выходе задатчика 25 дефектов опор качения пропорционален амплитуде преобладающего дефекта беговых дорожек кблец подшипника. Напряжение электрического сигнала на втором выходе задатчика пропорционально индексу формы преобладающего дефекта. На вход третьего блока 24 умножения поступает сигнал с задатчика 25 с напряжением пропорщюнальным амплитуде преобладающего дефекта и переменный сигнал с блока 23 перестройки частот, изменяющийся с частотой кратной частоте вращения сепараторов подишпников опор исследуемого вала и ищдексу формы преобладающего дефекта. На входы i блока 23 перестройки частот поступает синусоидальный сигнал, изменяющийся с частотой вращения сепаратора, и напряжение пропорционгшьное индексу формы беговой дорожки. Синусоидальный сигнал с выхода блока 23 перемножения, связанный с преобладающим дефектом беговых, дорожекколец подщипников, поступает на вход сумматора деформации. Сигнал на выходе сум-. матора деформации пропорционален вибрации исследуемого вала относительно корпуса в направлении линии контакта одного из тел качения подщипниковой опоры с беговыми дорожками колец, определяющей переменные составляющие деформадаи. рассматриваемого тела качения. Чтобы учесть, что динам11ческие процессы для каждого из тел качения подапганика сдвинуты по фазе, введена схема задержки, имеющая m отводов, соответствующих числу тел качения подщипниковых опор. , 4 снимаемые с соседних вьгходов схемы задержки, имеют сдвиг по фазе равный 27r/ni. Пороговый эле.мснт 12 срезает отрицательную часть сигнала, поступающего на него с выхода схемы задержки. Сигнал с выхода схемы I ; ;iдержки возводится в степень 3/2 и квадратичную степень, для чего в схему введена цепочка из параллельных степенного преобразователя 13 н квадратора 14. Коэффициенты усиления нормирующих усилителен 15 и 16 определяются конструктавными параметрами объекта исследования и коэффициентами трения кпчения и вращения. Сигнал с выходов усипнтелсй 16,15 постзшаег на входы вглходиого сумматора 17,частотный состав сигнала на выходе ныхо/шого сумматора 17 соответствует частотному составу нестабильности мгновенной скорости вращения. Передаточная функция фтотьтра 18 обратно пропорциональна разности между собственной .тотой угловых качений исследуемого вала, на которую настроен фильтр, и частотой I электрического сигнала на входе. ЭлектрическШ сигнал на выходе фильтра 18, пропорциональный угловы.м качениям исследуемого вала, дифференцируется дифферснцнрующил{ sBcirci.v I и поступает на вход блока 20 регистращш. Измерение проводится в рабошх условиях для , обт ектов, имеющих вращающийся вал в опорах, включая объе1 ть, доступ к валу у которых невозможен. Отсутствие подвижного датчика -, на вращающихся элементах объекта нсслсдовлнпя исключает вносимые ими ; псгрсшпостн измерения и необходимость дополнительной баланс.чровки системы. ПредлОжеЕ1ное устройство может может быть пользовано в приборостроении для измерения | нестабильности мгновепной скорости вращения герметизированных гиромоторов, применяемых в гироннтеграторах, особенностью которых являются малые габариты, а также для контроля привода аппаратуры магнитной записи и т Д. зобретения Устройство для измерения неравномерности корости вращающихся валов в опорах качеия, содержащее три усилителя, соединенные оследовательно выходной сумматор, фильтр, ифференцируюидее звено и блок регистрации, тличающееся тем, что, с целью шеличения диапазона и повыщения точности змерения малоинерционных валов, в устройтво введены закрепленные на корпусе объека измерения осевой вибропреобразователь, ось увствительности которого параллельна оси ваа, и два радиальньгх вибропреобразоватепя, ервый и второй блоки умножения, иодключенные через усилители к выходам радиальных вибропреобразователей, последовательно соединенные генератор базовой частоты и фазосдвигающеё звено, выходы которых подключены к вторым входам блоков умножения, задатчик дефектов опор качения, блок перестройки частоты, входы- которого подключены к выходам генератора базовой частоты и задатчика дефектов опор качения, третий блок умножения входы которого подключены к выходам блока перестройки частоты и задатчика дефектов опор качения, задатчик нагрузок опоры, сумматор деформации, каждый из четырех входов которого подключен к выходам блоков умножения и к выходу задатчика нагрузок опоры, а пятый вход подключен к выходу осевого вибропреобразователя через усилитель, многоотводная схема задержки с числом отводов по числу тел качения опоры, однотипные цепи, ка дая из которых содержит последовательйЬ соединенные пороговый элемент, вход которого подключен к соответствующему отводу схемы задержки, а выход соединен с дополнительно введенными, последодательно включенными f. квадратором и вторым нормирующим усилителем, степенной преобразователь, первый нормирующий усилитель, причем соответствующие выходы первого и второго нормирующих усилителей соединены с входами выходного сумматора. Источники информации, принятые во внимание при экспертизе 1.Потапов Л. А. Измерение вращающих моментов и скоростей вращения микроэлектродвигателей. М., Энергия, 1974, с. 72-75. 2.Сборник, Вопросы автоматизации измерения неэлектрических величин. Труды ВПИ, Воронеж, с. 22-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики подшипников качения | 1977 |
|
SU696330A1 |
| Устройство для диагностики роторных опор | 1986 |
|
SU1361465A1 |
| Устройство для диагностики подшипника качения | 1980 |
|
SU864040A1 |
| Устройство для диагностики подшипниковых узлов механических систем | 1982 |
|
SU1021947A1 |
| Устройство для диагностики шарикопод-шипНиКОВ | 1978 |
|
SU823943A2 |
| Устройство для прогнозирования ресурса работы механических систем | 1984 |
|
SU1247897A1 |
| Устройство для диагностики электромеханических систем | 1985 |
|
SU1337706A1 |
| Устройство для диагностики шарикоподшипников | 1978 |
|
SU721696A1 |
| Устройство для диагностики шарикоподшипников | 1977 |
|
SU746235A1 |
| Устройство для измерения жесткости подшипника качения | 1983 |
|
SU1134896A2 |