Изобретение относится к измерительной технике и может быть использовано в приборостроении и машиностроении для измерения несущей способности смазки роторных опор.
Цель изобретения - повьшение точности измерения несущей способности смазочного слоя во всех режимах контактирования путем повьпиения точности организации режимов работы смазки с учетом не только частоты прорывов смазочного слоя, но и длительности контактирования и определения динамических нагрузок на тела качения с учетом дефектов изготовления и сборки элементов опор.
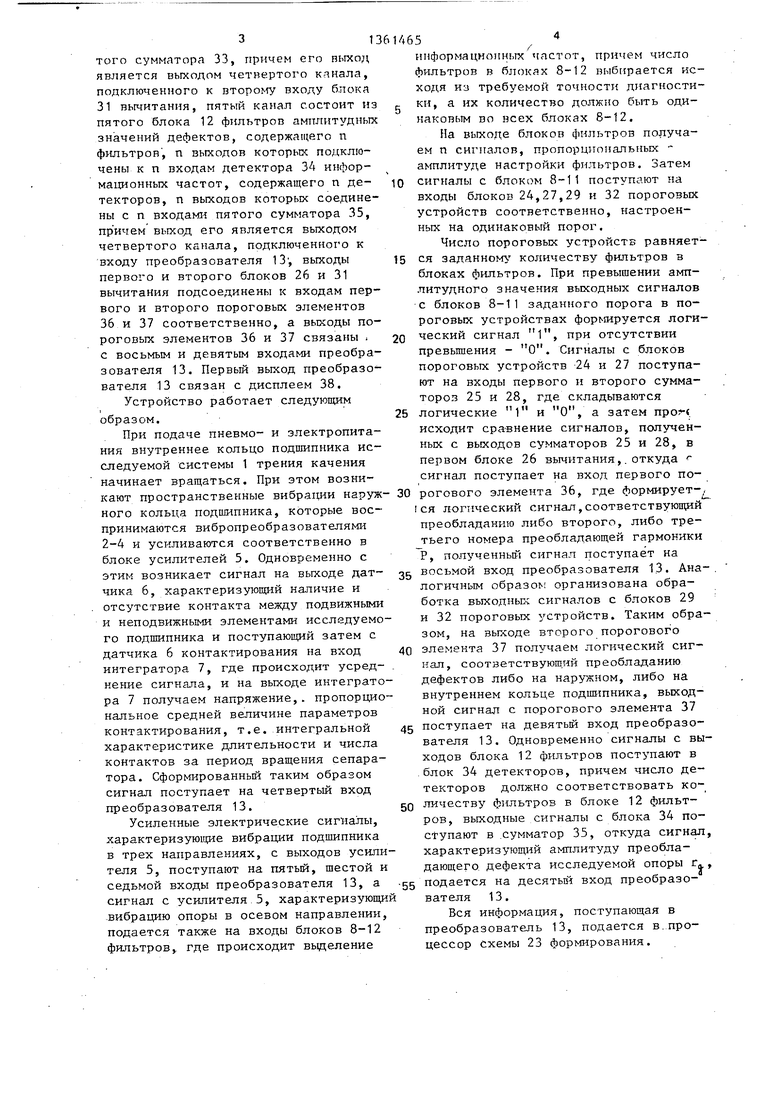
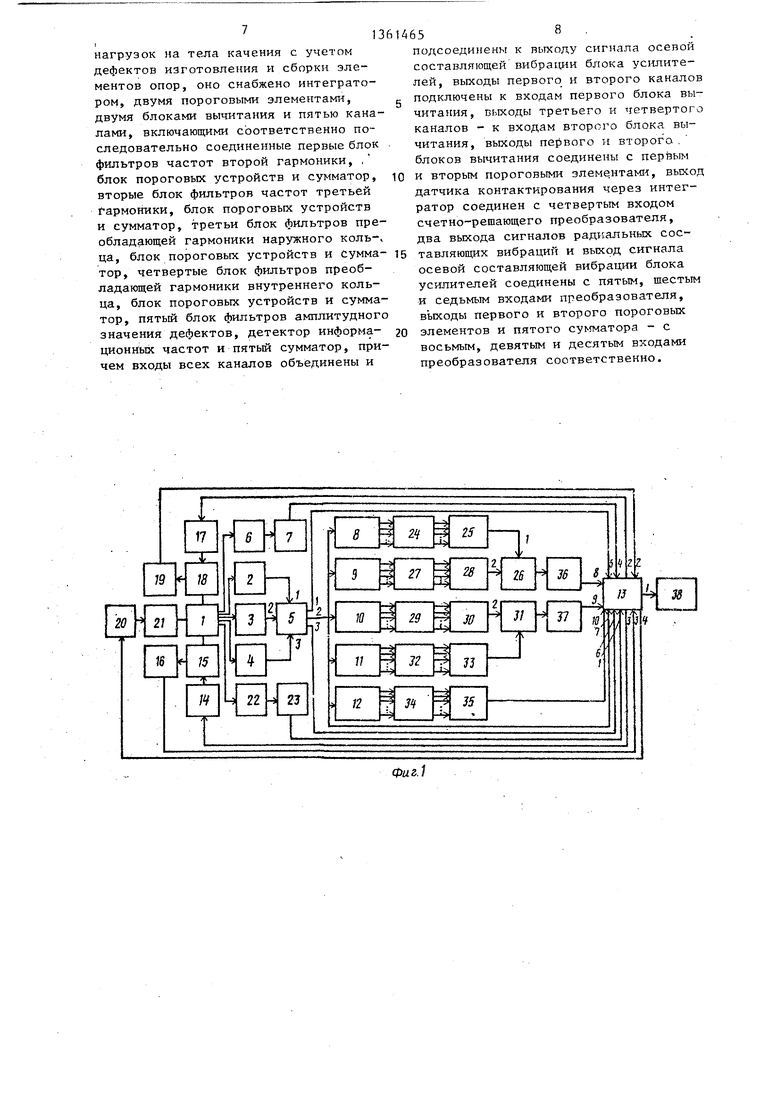
На фиг.1 представлена блок-схема устройства; на фиг.2 - блок-схема алгоритма работы устройства.
На исследуемой системе 1 трения качения установлены взаимно ортогонально вибропреобразователи 2-4, причем вибропреобразователи 2 и 4 - в радиальных направляющих, а вибро
преобразователь 3 - в осевом. Первый, второй и третий входы блока усилителей 5 соединены с вибропреобразователями 2-4.
Выход датчика 6 контактирования - подключен к входу интегратора 7, Выход усилителя 5 подключен к входам блока 8 фильтров частот второй гармоники, блока 9 фильтров частот третьей гармоники, блока 10 фильтров преобладающей гармоники наружного кольца, блока 11 фильтров преобладающих частот внутреннего кольца и блока 12 фильтров амплитудных значений дефектов.
Подпружиненные щетки датчика 6 контактирования установлены на эле-, ментах системы 1 трения качения, разделенных слоем смазки. Первьй, второй и третий выходы блока усилителей 5 соединены с пятым, седьмым и шестым входами счетно-решающего преобразователя 13 „
Выход интегратора 7 связан с чет- верть1м входом . преобразователя 13. К третьему и второму выходам преобразователя 13 подключены соответственно последовательно соединенные усилитель 14 мощности осевого направления, блок 15 задания осевой нагрузки и датчик 16 осевой нагрузки и последовательно соединенные усилитель 17 мощности радиального направления, блок 18 задания радиальной нагрузки
0
5
0
5
0
5
0
.
Q
и датчик 19 радиальной нагрузки, К третьему входу преобразователя 13 подключен выход датчика 16 осевой нагрузки, к четвертому выходу последовательно подсоединены регулируемьш источник 20 питания и пневмошпиндель 21 с установленной на нем системой 1 трения качения, связанной с датчиком 22 частоты сепаратора, выход которого подключен к схеме 23 формирования, выход которой соединен с пер- входом преобразователя 13. Выходы блока усилителя 5 подключены к пятому, седьмому и шестому входам преобразователя 13 соответственно, причем второй выход усилителя 5 соединен с входами пяти каналов, первый из них состоит из первого блока 8 фильтров частот второй гармоники, содержащего п фильтров, п вьпсодов которых подключены к п входам первого блока 24 пороговых устройств, содержащего п пороговых устройств, п выходов которых соединены с п входами сумматора 25, выход которого является выходом первого канала. Подключенного к первому входу первого блока 26 вычитания, второй канал состоит из второго блока 9 фильтров час- тоты третьей гармоники, содержащего п фильтров, п выходовкоторых подключены к п входам второго блока 27 пороговых устройств, содержащего п пороговых устройств, п выходов которых соединены с п входами сумматора 28, причем его выход является выходом второго канала, подключенного к второму входу первого блока 26 вычитания, третий канал состоит из третьего блока 10 фильтров преобладаю-, щей гармоники наружного кольца, содержащего п фильтров, п выходов которых подключены к п входам третьего
5 блока 29 пороговых устройств, содержащего п пороговых устройств, п выходов которых соединены с п входами . третьего сумматора 30, причем его выход является выходом третьего канала, подключенного к первому входу второго блока 31 вычитания, четвертый канал состоит из четвертого блока 11 фильтров преобладающей гармоники внутреннего кольца, содержащего
g п фильтров, п выходов которых под-., ключены к п входам четвертого блока 32 пороговых устройств, содержащего п пороговых устройств, п выходов которых соединены с п входами четвертого сумматора 33, причем его выход является выходом четвертого канала, подключенного к второму входу блока 31 вычитания, пятый канал состоит из пятого блока 12 фильтров амплитудных значений дефектов, содержащего п фршьтров, п выходов которых подключены к п входам детектора ЗА информационных частот, содержащего п детекторов, п выходов которых соединены с п входами пятого сумматора 35, причем выход его является выходом четвертого канала, подключеннот о к входу преобразователя 13, выходы первого и второго блоков 26 и 31 вычитания подсоединены к входам первого и второго пороговых элементов 36 и 37 соответственно, а выходы пороговых элементов 36 и 37 связаны с восьмым и девятым входами преобразователя 13. Первый выход преобразователя 13 связан с дисплеем 38.
Устройство работает следующим образом.
При подаче пневмо- и электропитания внутреннее кольцо подшипника исследуемой системы 1 трения качения начинает вращаться. При этом возникают пространственные вибраоти наружного кольца подшипника, которые воспринимаются вибропреобразователями 2-4 и усиливаются соответственно в блоке усилителей 5. Одновременно с этим возникает сигнал на выходе датчика 6, характеризующий наличие и отсутствие контакта между подвижными и неподвижными элементами исследуемого подшипника и поступающий затем с датчика 6 контактирования на вход интегратора 7, где происходит усред- нение сигнала, и на выходе интегратора 7 получаем напряжение,, пропорциональное средней величине параметров контактирования, т.е. интегральной характеристике длительности и числа контактов за период вращения сепаратора. Сформированный таким образом сигнал поступает на четвертый вход преобразователя 13.
Усиленные электрические сигналы, характеризующие вибрации подшипника в трех направлениях, с выходов усилителя 5, поступают на пятый, шестой и седьмой входы преобразователя 13, а сигнал с усилителя 5, характеризующи вибрацию опоры в осевом направлении, подается также на входы блоков 8-12 фильтров, где происходит выделение
0
5
информациоии.гх частот, причем число фильтров в блоках 8-12 выбирается исходя из требуемой точности диагности- ки, а их количество должно быть одинаковым во всех блоках 8-12.
На выходе блоков фильтров подучаем п сигналов, пропорциональных амплитуде настройки фильтров. Затем
0 сигналы с блоком 8-11 поступают на входы блоков 24,27,29 и 32 пороговых устройств соответственно, настроенных на одинаковый порог.
Число пороговых устройств равняет5 ся заданному количеству фильтров в блоках фильтров. При превышении амплитудного значения выходных сигналов с блоков 8-11 заданного порога в пороговых устройствах формируется логический сигнал 1, при отсутствии превышения - О. Сигналы с блоков пороговых устройств 24 и 27 поступают на входы первого и второго сумматоров 25 и 28, где складываются логические 1 и О, а затем (, исходит сравнение сигналов, полученных с выходов сумматоров 25 и 28, в первом блоке 26 вычитания,. откуда сигнал поступает на вход первого по0 рогового элемента 36, где формирует-/ Iся логический сигнал,соответствующий преобладанию либо второго, либо третьего номера преобладающей гармоники Р, полученный сигнал поступает на
g восьмой вход преобразователя 13. Ана-. логичным образоь; организована обработка выходных сигналов с блоков 29 и 32 пороговых устройств. Таким образом, на выходе второго пороговог о
0 элемента 37 получаем логический сигнал, соответствующий преобладанию дефектов либо на наружном, либо на внутреннем кольце подшипника, выходной сигнал с порогового элемента 37
5 поступает на девятьм вход преобразователя 13. Одновременно сигналы с выходов блока 12 фильтров поступают в блок 34 детекторов, причем число детекторов должно соответствовать коQ личеству фильтров в блоке 12 фильтров, выходные сигналы с блока 34 поступают в .сумматор 35, откуда сигнал, характеризующий амплитуду преобладающего дефекта исследуемой опоры г,
5 подается на десятьм вход преобразователя 13.
Вся информация, поступающая в преобразователь 13, подается в.процессор Схемы 23 формирования.
51361465
Сигнал, пропорциональньй средней лительности прорывов смазочного слоя
ма от но ще ту ст зн
и.
Р
где функция е
(Ucp ku)
представляет собой обобщенную функхдаю, определенную как
k и„)
-1, если Ucj. Um )
0,если
1,если
U.,
а. ku
р
где и
Р
- напряжение, сфорютрованное
с помощью интегратораj . Uyn - максимальное значение сигнала контактирования,
н соответствии с приведенным алгоритмом сравнивается с величиной 0,5 Um , соответствующей границе гидродинами-i ческого и контактногидродинамического режима контактирования. При отсутствии контакта (Utp 0, Ucp 1) процессор преобразователя 13 формирует управляющий сигнал Пуск, поступающий на усилитель 14, на выходе которого появляется напряжение, запитывающее двигат.ель блока 15 задания осевой нагрузки.
Одновременно с этим.процессор преобразователя 13 подает второй управляющий сигнал на второй усилитель 17 на входе которого появляется напряжение, запитывающее двигатель бло- - ка 18.
Сформированные таким образом сигналы, несущие информацию о радиальной R и осевой А.нагрузке, поступают с выходов датчиков 16 и 19 на второй и третий входы преобразователя 13.
Увеличение осевой и радиальной нагрузки происходит до тех пор, пока напряжение на выходе интегратора 7 не достигнет значения, равного/С 0,05 и(е + 0). После этого процессор преобразователя 13 отключает управляющий сигналы с усилителей 14 и 17 мощности.и сигналы,-пропорциональные статической осевой А и радиальной R нагрузке, преобладающего дефекта q, номера гармоники преобладающего дефекта Р осевой Xj и радиальных х,, Xj вибраций поступают в процессор преобразователя 13, где происходит решение уравнения статического равновесия, расчет динамических нагрузок, решение интегрального уравнения относительно несущей способности смазочного слоя, соответствующего гидродинамическому режиму.
6
0
После окончания вычисления ин фор- мадии о режиме контактирования, соответствующей ему осевой и радиальной нагрузке, характеристиках несущей способности смазочного слоя поступает на дисплей 38, а само устройство переводится в режим измерения значения функции е (Ujp -0,05U).
5
0
5
0
5
0
5
0
5
Формула изобретения
Устройство для диагностики роторных опор, содержащее приводной электродвигатель, регулируемый источник питания, три вибропреобразователя, закрепленных на оправке, линии измерения которых взаимно перпендикулярны, блок усилителей, датчик контактирования, связан 1ый через две подпружиненные токосъемные щетки с контактирующими элементами подшипника, датчик частоты сепаратора, связанный с вращающимся элементом испытуемой опо- .ры и соединенный со схемой формирования, последовательно соединенные усилитель мощности осевого направления, блок задания осевой нагрузки, датчик осевой нагрузки и последовательно соединенные усилитель мощности радиальной нагрузки, блок задания радиальной нагрузки и датчик радиальной нагрузки, решающий преобразователь и блок регистрации, Щ1ичем выход регулируемого источника питания подключен к приводному электродвигателю, на валу которого устанавливается испытуемая опора, выходы вибропреобразователей подключены к входам блока усилителей, первьш, второй и третий входы счетно-решающего преобразователя подключены к выходам схемы формирования, датчика радиальной нагрузки и датчика осевой нагрузки, а его первый, второй, третий и четвертый выходы подключены к входам блока регистрации, усилителя мощности радиального направления, усилите-, ля мощности осевого направления и регулируемого источника питания соответственно, отличающееся тем, что, с целью повышения точности измерения несущей способности смазочного, слоя во всех режимах контак - тирования путем повьщ1ения точности организации режимов работы смазки с учетом частоты и длительности контактирования и определения динамических
нагрузок на тела качения с учетом дефектов изготовления и сборки элементов опор, оно снабжено интегратором, двумя пороговыми элементами, двумя блоками вычитания и пятью кана лами, включающими соответственно последовательно соединенные первые блок фильтров частот второй гармоники, , блок пороговых устройств и сумматор, вторые блок фильтров частот третьей гармоники, блок пороговых устройств и сумматор, третьи блок фильтров преобладающей гармоники наружного коль-, ца, блок пороговых устройств и сумматор, четвертые блок фильтров преобладающей гармоники внутреннего кольца, блок пороговых устройств и сумматор, пятый блок фильтров амплитудного значения дефектов, детектор информационных частот и пятый сумматор, причем входы всех каналов объединены и
10
61465и
подсоединены к выходу сигнала осевой составляющей вибрации блока усилителей, выходы первого и второго каналов подключены к входам первого блока вычитания, вь,1ходы третьего и четвертого каналов - к входам второго блока вычитания, выходы neiiBoro и второг а , блоков вычитания соединены с первым и вторым пороговыми элементами, выход датчика контактирования через интегратор соединен с четвертым входом счетно-решающего преобразователя, два выхода сигналов радиальных составляющих вибраций и выход сигнала осевой составляющей вибрации блока усилителей соединены с пятым, щестым и седьмым входами преобразователя, в ыходы первого и второго пороговых элементов и пятого суь матора - с восьмым, девятым и десятым входами преобразователя соответственно.
15
20
ВЫ исходных (JoMW/x и, 6,5Д, Оа, 5,j ./в,Л, А О, ft,,f О
включит пнейно- и злектро- пиггтние
НзмЕренае осеоЬй и радиальной нагрузок
С SAOW 7
Ввод осевой А а радиальной R нагрузок
TI
ввод преобладающего десрекгпа. о, . гармоника преобладающего десрекгпа Р, амплитуды преобладающего аесректаг
1.
Решение урабнения статического ривновесия Относительно
б,д,б1
з;
ввод осевой Xj и. радиальной Л,, Xj 8uSpaii,uu
Расчет динамических на г fry- зак, действующих S контакте каждого шарика с кольцами.
Решение интегрального уравнения относительно несищей способности.
±
Вы Вод на. дисплей
Редактор С. Пекарь
Составитель В, Пучинский
Техред А.Кравчук Корректор И. Эрдейи
Заказ 6219/44Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобре гений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Прсизводственно-полиграфкческое предприятие, г. Ужгород, ул. Проектная, 4
TI

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения неравномерности скорости вращения валов в опорах качения | 1977 |
|
SU711474A1 |
| Устройство для акустических исследований скважин в процессе бурения | 1982 |
|
SU1108196A1 |
| Устройство для диагностики систем трения качения | 1983 |
|
SU1231419A1 |
| Устройство для диагностики подшипников качения | 1985 |
|
SU1278648A1 |
| Устройство для измерения характеристик транспортного потока | 1989 |
|
SU1661818A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2146806C1 |
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| ВИБРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2319210C1 |
| СПОСОБ КОМПЛЕКСНОЙ ВИБРОДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2104510C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU669374A1 |
Изобретение относится к измерительной технике и может быть использовано в приборостроении и машиностроении для измерения несущей способности смазки роторных опор. Цель изобретения - повьшение точности измерения несущей способности смазочного слоя. Это достигается тем, что устройство содержит систему трения качения, на которой закреплены три вибропреобразователя, линии измерения которых взаимно перпендикулярны. Моменты и длительность контактирования фиксируются датчиком контактирования, обрабатываются в интеграторе и поступают на вход , счетно-решающего преобразователя (СРП). Вибросигналы используются в СРП для уточненного расчета динамической нагрузки с учетом режимов контактирования совместно с сигналам- ми, характеризующими дефекты изготовления и сборки опор. Нагрузки для получения необходимых контактирования задаются СРП с помощью блоков задания осевой, радиальной нагрузки и регулируемого источника питания приводного электродвигателя, на валу которого устанавливает- ся испытываемая опора, 2 ил.
| Устройство для диагностики подшипников качения | 1985 |
|
SU1278648A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
