Изобретение относится к устройствам предназначенным для подачи изделий, например тепловыделяющих сборок энергетических ядерных реакторов или металлических слитков, на переработку в герметичную рабочую камеру. Оно может быть использовано в радиохимической и металлургической промышленности.
Известно устройство для подачи изделий на переработку в герметичную рабочую камеру, включающее герметичный корпус с загрузочным отверстием, механизм для перемещения изделия, два затвора и привод механизма для перемещения изделий.
В этом устройстве, загрузочное отверстие выполнено сверху корпуса, по всей его длине. Роль одного затвора, герметизирующего рабочую камеру при загрузке очередного изделия во внутреннюю полость корпуса, выполняет корпус плунжера, воздействующего на изделие при его переработке. Второй затвор выполнен в виде крышки и закрывает загрузочное отверстие в корпусе устройства.
В этом устройстве механизм для перемещения изделий находится снаружи герметичного корпуса. Во внутреннюю полость корпуса вводится лишь перемещаемый элемент механизма, непосредственно воздействующий на изделие при его перемещении. При этом перемещаемый элемент должен иметь длину, превышающую длину изделия. При выдвинутом положении перемещаемого элемента габаритный размер устройства увеличивается на соответствующую величину.
Недостатком такого решения является необходимость значительных габаритных размеров устройства при работе с изделием.
Известно также устройство для подачи изделий, например, тепловыделяющих сборок энергетических ядерных реакторов, в герметичную рабочую камеру, включающее раму, герметичный корпус с загрузочным отверстием, соединенный с помощью прижимного устройства с рабочей камерой, механизм для перемещения изделий, помещенный в корпус и привод.
В этом устройстве на раме, установлен герметичный корпус с загрузочным отверстием, механизм для перемещения изделий, два затвора и привод. Герметичный корпус соединяется с рабочей камерой с помощью прижимного устройства. Один из затворов служит для закрывания загрузочного отверстия в корпусе. В качестве другого затвора используется корпус ножа, служащего для переработки изделия в рабочей камере. Он закрывает рабочую камеру при загрузке изделия.
Механизм для перемещения изделий помещен в корпус устройства. Он содержит перемещаемый элемент в виде цепи с прикрепленными к ней толкателями, воздействующий на изделие.
Загрузочное отверстие расположено в корпусе со стороны, противоположной рабочей камере.
Для загрузки изделие должно быть предварительно переведено из вертикального положения в горизонтальное. Для этого используется дополнительное устройство-кантователь.
Переработка изделия требует большого количества промежуточных операций.
Перед загрузкой в корпус этого устройства изделие должно быть расположено горизонтально у торцовой поверхности корпуса. Поэтому для размещения данного устройства требуются значительные производственные площади.
Недостаток такого выполнения устройства для подачи изделий состоит в значительных габаритах конструкции.
Целью изобретения является уменьшение габаритов устройства.
Поставленная цель достигается тем, что механизм для перемещения изделий, снабжен зажимом для изделия и соединен с приводом через разъемную муфту, а корпус установлен на раме с возможностью его поворота в вертикальной плоскости и продольного перемещения, причем загрузочное отверстие выполнено в корпусе со стороны рабочей камеры, а также тем, что привод прижимного устройства выполнен в виде привода механизма для перемещения изделий, а на корпусе установлены пружины, взаимодействующие с приводом, снабженным упором.
Кроме того, устройство снабжено дополнительным герметичным корпусом с помещенным в нем механизмом для перемещения изделий, установленным на раме, а рама выполнена поворотной относительно горизонтальной оси и снабжена фиксаторами. Механизм для перемещения изделий выполнен, в виде реечного храпового механизма, преобразующего возвратно-поступательное движение в пульсирующее.
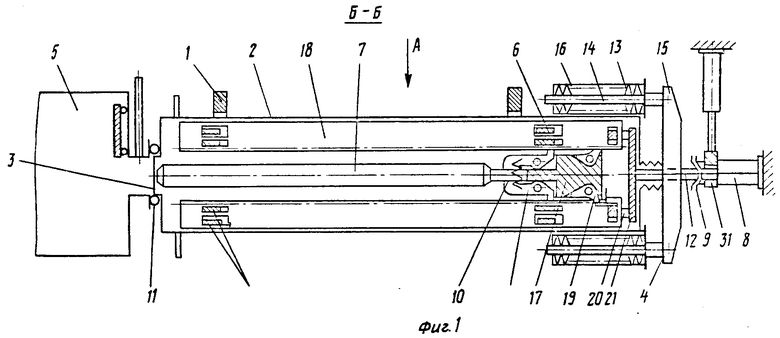
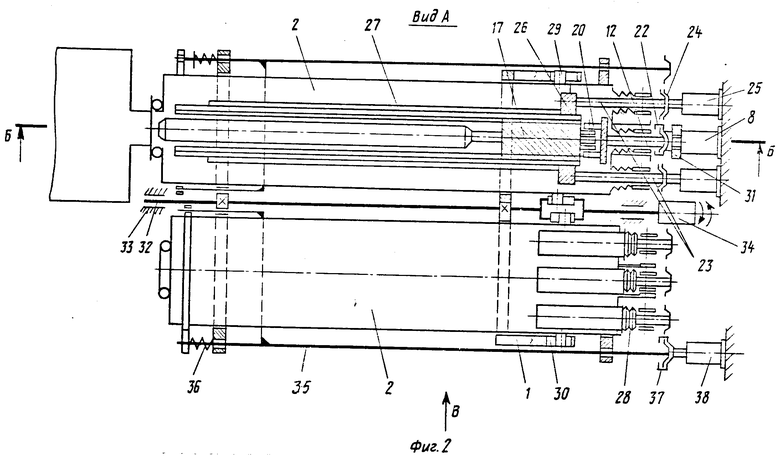
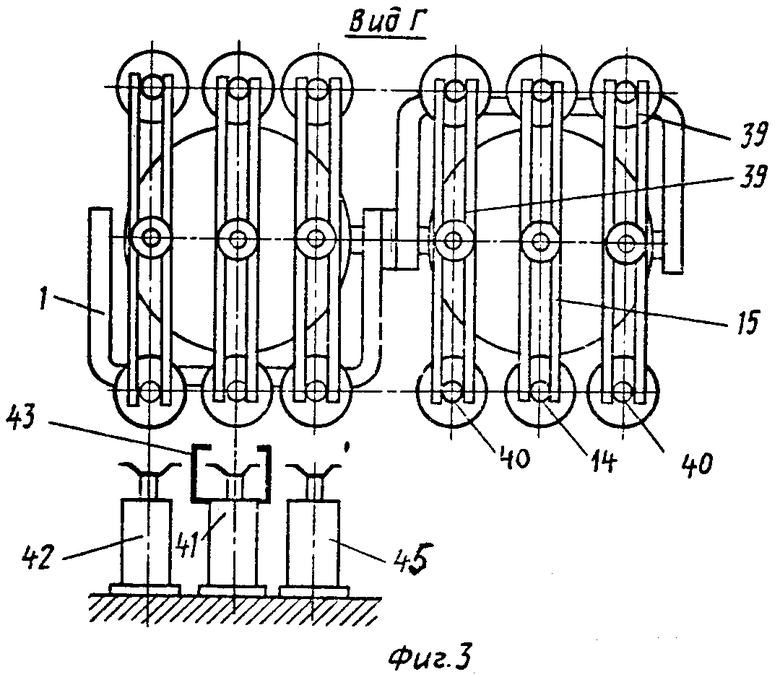
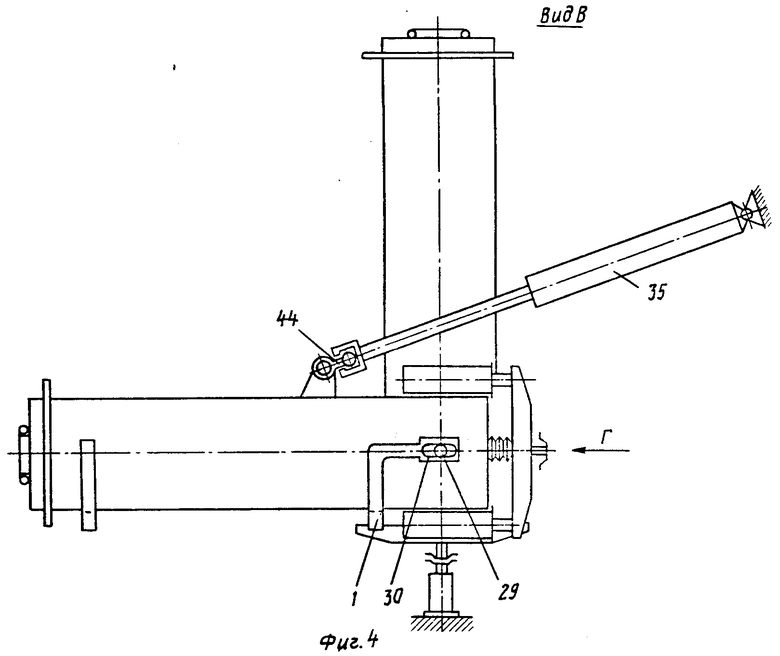
На фиг. 1 изображен продольный разрез устройства (Б-Б); на фиг.2 - вид А; на фиг. 3 - вид Г; на фиг.4 - вид В. На фиг.2 и фиг.3 изображено устройство с дополнительным герметичным корпусом (с двумя герметичными корпусами).
Изображения устройства, представленные на фиг.1 и фиг.4, являются общими как для устройства с одним, так и с двумя герметичными корпусами.
Устройство состоит из рамы 1, установленного на ней герметичного корпуса 2, имеющего загрузочное отверстие 3, прижимного устройства 4, предназначенного для поджима герметичного корпуса 2 к рабочей камере 5. Внутри герметичного корпуса 2 помещен механизм 6 для перемещения изделий 7.
Механизм 6 соединен с приводом 8 через разъемную муфту 9. Кроме того, механизм 6 содержит зажим 10 для изделий 7.
Загрузочное отверстие 3 выполнено в корпусе 2 со стороны рабочей камеры 5. Загрузочное отверстие 3 снаружи снабжено герметизирующей прокладкой 11. Прокладка 11 может дистанционно заменяться.
Прижимное устройство 4 включает привод 8, шток 12, соединенный с приводом 8 через разъемную муфту 9, и тарельчатые пружины 13, установленные на штоках 14, которые, в свою очередь, соединены через коромысло 15 со штоком 12. Пружины находятся в сжатом состоянии и своими передними (обращенными к рабочей камере 5) торцовыми поверхностями упираются во внутренние торцовые поверхности цилиндрических корпусов 16, жестко соединенных с корпусом 2.
Механизм 6 для перемещения изделий 7 выполнен в виде реечно-храпового механизма, преобразующего возвратно-поступательное движение в пульсирующее. Он включает перемещаемый элемент 17, пять пар зубчатых реек 18, размещенных пакетами с двух противоположных сторон перемещаемого элемента 17, и соответствующее им число храповых собачек 19, закрепленных на перемещаемом элементе 17 и взаимодействующих с зубчатыми рейками 18. Зубчатые рейки одной группы предназначены для передвижения перемещаемого элемента 17 в направлении к рабочей камере 5 (вперед). Рейки другой группы предназначены для передвижения перемещаемого элемента в противоположном направлении (назад). Когда рейки одной группы сведены и находятся в зацеплении со своими храповыми собачками 19, рейки другой группы разведены и не могут взаимодействовать со своими храповыми собачками.
Кроме того, рейки обеих групп подразделяются на неподвижные и подвижные; рейки одного назначения с целью создания равномерной нагрузки на перемещаемый элемент попарно сдублированы и располагаются симметрично относительно оси перемещаемого элемента 17. Подвижные рейки через вилки 20 и коромыслом 21 связаны с штоком 12. Таким образом, через шток 12 осуществляется не только прижим герметичного корпуса 2 к рабочей камере 5, но и передача рабочего движения к механизму 6.
Для отвода корпуса 2 от рабочей камеры 5 предназначены зацепы 22, прикрепленные к установленной на штоке привода 8 полумуфте.
Штоки 23 через разъемные муфты 24 соединены с приводами 25. Штоки 23 через коромысла 26 соединены также с планками реверса 27 снабженными наклонными пазами. В эти пазы входят хвостовики планок, которые являются направляющими для зубчатых реек 18.
Отверстия, через которые осуществлен ввод штоков 12 и 23 во внутреннюю полость корпуса 2, герметизированы сильфонами 28.
Зажим 10 закреплен на перемещаемом элементе 17 и включает губки, сжимаемые пружинами. Для разжима губок в соответствующих местах герметичного корпуса 2 закреплены специальные упоры (на чертежах не показаны).
На наружной поверхности герметичного корпуса 2 имеются цапфы 29, согласованные с гнездами 30, выполненными в раме 1.
Гнезда 30 выполнены в виде пазов. Это дает возможность продольного перемещения герметичного корпуса 2 относительно рамы 1.
Для ограничения обратного хода штока привода 8 между его корпусом и закрепленной на штоке полумуфтой установлен упор 31. Для установки и удаления упора 31 служит привод.
В случае использования двух герметичных корпусов 2 с помещенными в них механизмами 6 для перемещения изделий 7 рама 1 выполнена поворотной относительно горизонтальной оси.
Она установлена в опорах 32, закрепленных на станине 33, снабжена приводом 34 поворота и фиксаторами 35. Для ввода фиксаторов в отверстия во фланцах герметичного корпуса 2 служат пружины 36. С помощью разъемной муфты 9 с зацепами 37 фиксаторы 35 могут соединяться с приводом 38, предназначенным для вывода фиксаторов 35 из отверстий во фланцах корпуса 2.
Приводы могут быть выполнены пневматическими или гидравлическими.
Рабочая камера 5 снабжена затвором. А создание в полости корпуса 2, находящегося на рабочей позиции, вакуума или специальной атмосферы происходит через трубопровод.
Штоки 23 предназначены для реверсирования механизма 6. Как и шток 12, они через свои коромысла 39 связаны со штоками 10, на которых установлены пружины (на чертежах не показаны). Установка этих пружин осуществлена совершенно аналогично установке тарельчатых пружин 13. Тарельчатые пружины, установленные на штоках 40, также постоянно находятся в сжатом состоянии.
Для приведения в действие механизма 6 при вертикальном положении герметичного корпуса 2 предназначены привод рабочего движения 41 и приводы реверса 42. Для удержания корпуса 2 на месте при воздействии на него приводов 41 и 42 служат зацепы 43, взаимодействующие с соответствующими зацепами (на чертеже не показаны), прикрепленными к корпусу 2, на наружной поверхности выполнен шарнир и поворотный стержень 44 с головкой входящей в паз скобы, установленной на конце штока привода 45, что обеспечивает поворот герметичного корпуса 2 в вертикальной плоскости.
Устройство работает следующим образом (показано на примере работы устройства для подачи изделий, включающего два герметичных корпуса 2).
В исходном положении один из герметичных корпусов 2 с загруженным изделием 7 находится на рабочей позиции, в отведенном от рабочей камеры 5 положении. Второй герметичный корпус 2 находится в это время на вспомогательной позиции, без изделия.
Отверстие в рабочей камере 5 закрыто затвором.
Включается привод 8. Его шток движется вперед, передвигая шток 12. Через связанное со штоком 12 коромысло 15 усилие передается на тарельчатые пружины 13. Через тарельчатые пружины 13 усилие передается на корпус 2, вследствие чего он передвигается до упора закрепленной на его переднем торце прокладкой 11 в наружную уплотнительную поверхность рабочей камеры 5, и происходит герметизация корпуса 2. Шток 12 продолжает перемещаться, сжимая пружины 13 и передвигая подвижные зубчатые рейки. Вследствие нелинейной характеристики тарельчатых пружин 13 усилие, сжимающее прокладку 11, при этом увеличивается незначительно: при использовании резиновой прокладки может быть предусмотрено, после ее прожатия на определенную величину, упирание корпуса 2 в жесткие поверхности камеры 5.
После прожатия прокладки 11 открывают затвор. При проведении процесса переработки изделия 7 в вакууме или специальной атмосфере перед открытием затвора производят вакуумирование внутренней полости корпуса 2 или заполнение ее соответствующим газом.
Штоки 23, управляющие реверсом механизма 6 для перемещения изделий 7, под действием тарельчатых пружин, установленных на штоках 40 находятся в крайнем заднем (выдвинутом из корпуса 2) положении. Это соответствует перемещению подвижных реек впереди. Таким образом, при перемещении штока 12 вперед подвижные рейки вместе с ними перемещаемый элемент 17 и изделие 7 передвигаются вперед на некоторую величину. В крайнем переднем положении штока 12 между корпусом привода 8 и установленной на его штоке полумуфтой устанавливают упор 31, ограничивающий величину обратного хода штока привода 8.
Шток привода 8 отводится назад.
Шток 12 под действием пружины 13 передвигается в том же направлении. Величину этого перемещения ограничивает упор 31. Поэтому и в крайнем заднем положении штока 12 пружины 13 продолжают прижимать корпус 2 с прокладкой 11 к наружной уплотнительной поверхности рабочей камеры 5, сохраняя герметичность корпуса 2.
При движении штока 12 назад вместе с ним перемещаются подвижные рейки 18. Перемещаемый элемент 17 с изделием 7 при этом удерживается неподвижными зубчатыми рейками.
В дальнейшем с помощью привода 8 и тарельчатых пружин 13 подвижные рейки совершают возвратно-поступательные движения, периодически перемещая изделие 7 на величину шага зубчатой рейки 18.
В конце переработки изделия 7 хвостовики губок зажима 10 при своем перемещении встречаются с упорами, на чертежах не показанными, установленными в передней части корпуса 2. При взаимодействии с ними хвостовиков губки разводятся, оставшаяся после переработки часть изделия 7 (хвостовик или огарок) свободно падает в приемное устройство в рабочей камере (на чертежах не показанное) или принудительно, с помощью манипулятора или другого устройства, извлекается из захвата 10. Движение перемещаемого элемента 17 в обратном направлении осуществляется после срабатывания приводов 25. Их штоки перемещаются вперед, только штоки 23, которые перемещают планки реверса 27 в крайнее переднее положение. При взаимодействии поверхностей пазов в планках реверса 27 с поверхностями входящих в них наклонных хвостовиков планок происходит перемещение последних в поперечном направлении. Одни планки разводятся, перемещая вместе с собой зубчатые рейки "вперед" (подвижные и неподвижные). Рейки "вперед" отходят от своих храповых собачек 20 и лишаются возможности взаимодействовать с ними. Другие планки наоборот, сводятся. Перемещаемые ими рейки "назад" подходят к своим храповым собачкам 19, получая возможность взаимодействовать с ними. Таким образом производится реверсирование механизма 6 для перемещения изделий, в результате чего при возвратно-поступательных движениях подвижных реек будет происходить пульсирующее перемещаемого элемента 17 в обратном направлении, назад.
Перемещаемый элемент 17 передвигается на некоторую величину назад, вглубь корпуса 2. Затвор закрывают. При наличии вакуума в полости корпуса 2, через трубопровод она сообщается с атмосферой.
В конце хода вперед штока 12 отводят упор 31. При последующем обратном ходе штока 12 зацепы 22 действуют на тыльную поверхность полумуфты, установленной на штоке 12.
Корпус 2 отводится в крайнее заднее положение.
Одновременно с описанными действиями в другой герметичный корпус 2, находящийся на вспомогательной позиции производят загрузку очередного изделия 7.
Привод 38 выводит фиксаторы 35 из отверстий во фланце корпуса 2. Герметичный корпус 2 приводом 45 поворачивают на цапфах 29 и переводят в вертикальное положение. При этом полумуфты, закрепленные на его штоках 12 и 23, устанавливаются над полумуфтами, закрепленными на штоках приводов 41 и 42, а зацепы, соединенные с корпусом 2 под зацепами 43, соединенными с корпусом привода 41. С помощью привода 41 перемещаемый элемент 18 с зажимом 10 передвигается в верхнее положение, где губки зажима 10 разводятся в результате взаимодействия их хвостовиков с упорами (на чертежах не показаны), установленными в верхней (передней) части герметичного корпуса 2. Сверху опускают очередное изделие 7, его нижняя часть входит между губками зажима 10.
Подвижные рейки 19 совершают обратный ход, в результате чего хвостовики губок отходят от упоров и зажим 10 зажимает изделие 7. С помощью приводов 42 изделие 7 вместе с перемещаемым элементом 17 опускают в крайнее нижнее (заднее) положение. Это может быть сделано без перемещения реек 18, при плавном опускании изделия 7 устройством, которым производилась его установка в зажим 10.
Далее герметичный корпус 2 переводят приводом 45 в горизонтальное положение.
Привод 38 освобождает фиксаторы 35. Последние под действием пружины 36 входят в отверстия во фланце герметичного корпуса 2, и герметичный корпус 2 закрепляется на поворотной раме 1.
Для смены герметичных корпусов привод 34 поворачивает раму 1 с закрепленными на ней корпусами 2 на 180о. При повороте корпуса 2, находящегося на рабочей позиции, полумуфта закрепленная на штоке 12, выходит из-под зацепов 22. Полумуфта установленная на фиксаторе 35, входит под зацепы, а головка поворотного стержня 44 входит в паз, выполненный на конце штока привода 38.
При переводе корпуса 2 на рабочую позицию полумуфта, закрепленная на его штоке 12, наоборот, устанавливается под зацепами 17, полумуфта, установленная на фиксаторе 47 выходит из-под зацепов 43, а головка поворотного стержня 37 выходит из паза, выполненного на конце штока привода 45.
Таким образом заканчивается цикл работы описываемого устройства. Далее он повторяется.
При использовании устройства с одним герметичным корпусом 2 увеличивается время перерыва между процессами переработки очередных изделий, но упрощается устройство и уменьшаются требуемые для его размещения производственные площади. Устройство с одним герметичным корпусом 2 имеет одну рабочую позицию. Рама 1 в этом случае выполняется стационарной. Фиксаторы 35, их привод 38 и привод 36 для поворота рамы 1 исключаются. Приводы 41, 42 и 45 устанавливаются на рабочей позиции.
Работа устройства с одним корпусом 2 включает следующие действия:
- поджим герметичного корпуса 2 к рабочей камере 5;
- открывание затвора;
- подача изделия 7 на переработку;
- закрепление затвора;
- отвод герметичного корпуса 2 от рабочей камеры 5;
- перевод герметичного корпуса 2 в вертикальное положение;
- загрузка очередного изделия 7;
- возвращение герметичного корпуса 2 в горизонтальное положение.
В данном устройстве имеется возможность значительно уменьшить требуемые для его размещения производственные площади.
Это обеспечивается тем, что загрузка изделия производится в нем в установленный вертикально корпус устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый клапан-отсекатель для газовых скважин | 2020 |
|
RU2726677C1 |
| КАМЕРА ДЛЯ ХРАНЕНИЯ КОНСЕРВИРОВАННЫХ ШКУР ЖИВОТНЫХ | 1991 |
|
RU2034758C1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2057630C1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Транспортное средство | 1990 |
|
SU1791261A1 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
| РЕВОЛЬВЕРНЫЙ СУППОРТ С ВЕРТИКАЛЬНОЙ ОСЬЮ РЕВОЛЬВЕРНОЙ ГОЛОВКИ | 1973 |
|
SU376177A1 |
| Устройство для перекладывания изделий | 1976 |
|
SU600069A1 |
| Патент США N 3621742, кл | |||
| Пуговица | 0 |
|
SU83A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
