(54) ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК СИЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2476838C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2422785C1 |
| Датчик механических давлений | 1983 |
|
SU1105765A1 |
| Устройство для измерения усилий | 1981 |
|
SU979905A1 |
| СИЛОИЗМЕРИТЕЛЬНАЯ ПЛАТФОРМА | 1991 |
|
RU2037794C1 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2013 |
|
RU2517961C1 |
| АВТОНОМНЫЙ ЗАБОЙНЫЙ РЕГИСТРАТОР СИЛОВЫХ ПАРАМЕТРОВ РАБОТЫ ДОЛОТ | 2023 |
|
RU2821288C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ СИЛ ПРИ ЭЛЕКТРОАЛМАЗНОМ ШЛИФОВАНИИ | 2001 |
|
RU2215641C2 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2475715C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПИШУЩЕГО УЗЛА | 2011 |
|
RU2475699C2 |
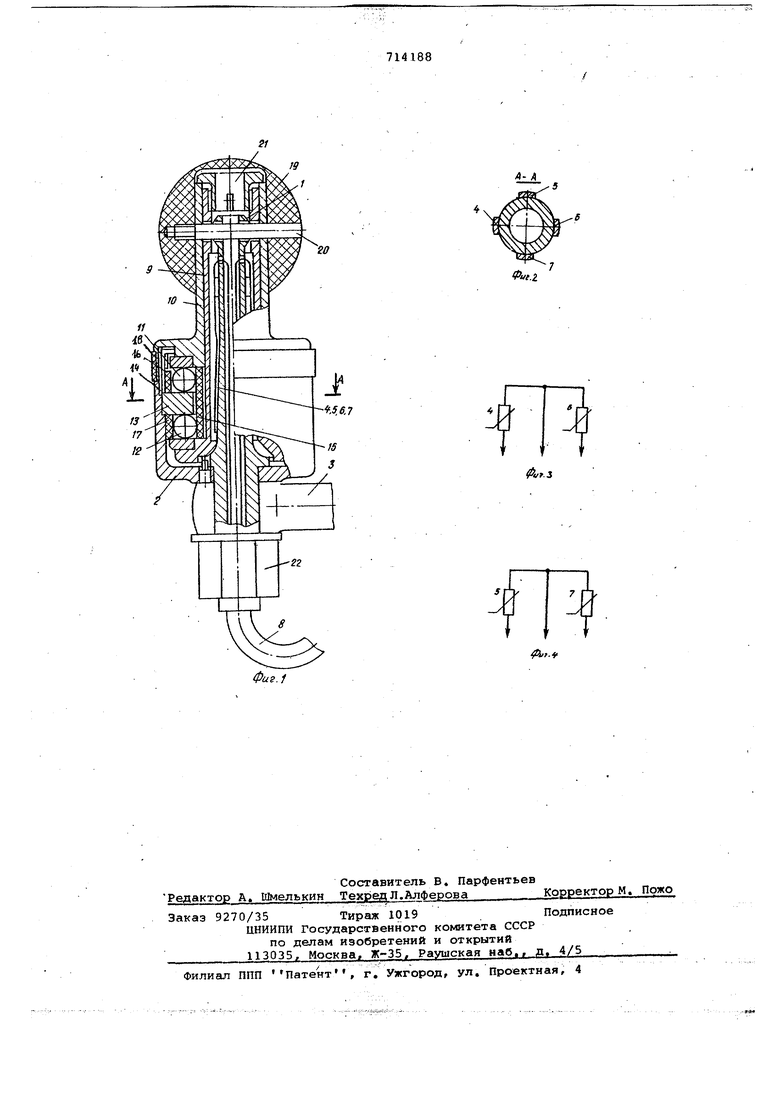
ары тенэорезисторов; на фиг, 4 , другой пары.
Датчик содержит упругий чувствиельный .элемент 1, выполненный в вие полого стержня с изменяющимся по го длине сечением, корпус 2, крон- тейн 3, проволочные прямоугольные тензореэисторы 4-7, наклеенные на наружной поверхности средней части пругого элемента 1, Электрическое соединение тензорёзисторов с измериельно-регистрирующей аппаратурой осуществляется шестипроводной линией 8, проходящей через центральное отверстие упругого элемента 1. Компенсатор погрешности измерения усилий состоит из внутренней 9 и наружной 10 втулок с фланцами на одном конце, установленных концентрично,Верхняя часть упругого чувствительного элемента 1 выполнена в виде сферической -силоприемной головки, помещенной в цилиндрическое отверстие внутренней втулки 9, Между фланцами втулок 9 и
10установлены два ряда шариков 11 и 12 с внутренней цилиндрической прокладкой 13, обеспечивающие перемещение втулок с минимальным трением,Прокладка 13 закреплена на корпусе 2 резьбовым соединением и стопорится кольцом 1.4. Центровка рядов шариков
11и 12 осуществляется эластичной цилиндрической обоймой 15 и со стороны корпуса - эластичными кольцами 16 и 47, Зазор между фланцем втулки 10 и корпусом 2 закрыт плоским резиновым эластичным кольцом 18 для герметизации. На втулку 10 одета шаровая эбонитовая рукоятка 19, закреплённая осью 20, проходящей через круглые отверстия в стенках втулки 10 и овальные отверстия в Ьтенках втулки 9 и через силоприемную головку упругого элемента 1, Втулки 9 и 10 сопряжены между собой посадкой сминимальным зазором, обеспечивающим их взаимное осевое переме1цение при регулировке винтом 21. Нижняя часть чувствительного элемента 1 жестко прикреплена к органу управления машиной кронштейном
3 с помощью гайки 22,
Тензометрический датчик сил работает следующим образом.
Сила, приложенная рукой машиниста к шаровой рукоятке 19, воспринимается сферической силоприемной головкой чувствительного элемента 1,вызывает прогиб этого элемента и деформацию тензорёзисторов 4-7,При этом втулки 9 и 10 с фланцами, благодаря двум рядам шариков 11 и 12, перемещаются параллельно дну корпуса 2, разгружая упругий чувствительный эл;емент 1 от дополнительных сил,связанных с положением руки машиниста н& рычаге управления, и тем самым повыдая точность измерения радиального усилия,
Тензометрический датчик сил позволяет оценить удобство управления новыми машинами и улучшить обслуживание рабочего места.
Формула изобретения
Тензометрический датчик сил, содержащий корпус с жестко закрепленным в нем упругим чувствительным элеентом с силоприемной rojioBKoift и тензорезисторами, отличающийся тем, что, с цельюповышения точности измерения радиальных сил при эргономических исследованиях.,
он снабжен компенсатором погрешности, размещенным в корпусе и выполненным в виде двух концентрично установленных втулок с фланцами на одном конце, между которыми расположёны шарики,
разделенным на два ряда жестко закрепленной в корпусе цилиндрической Прокладкой и центрирование со стороны внутренней втулки эластичной цилиндрической обоймой, а со стороны
корпуса - двумя эластичными кольцами,
при этом упругий чувствительный.элемент , установленный во внутренней втулке и шарнирно связанный с ней силоприемной головкой, жестко закреплен нижней частью в корпусе. 45 Источники информации,
принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 375500, кл. q 01 Ь 1/22, 1973.
2,Макаров Р,А. Тензометрия в маши50 построении. М., 1975, с. 138 (прототип) .
Ю
.5,6.7
А к
fut.i
vT.Z
.
