(54) СИГНАЛИЗАТОР ДАВЛЕНИЯ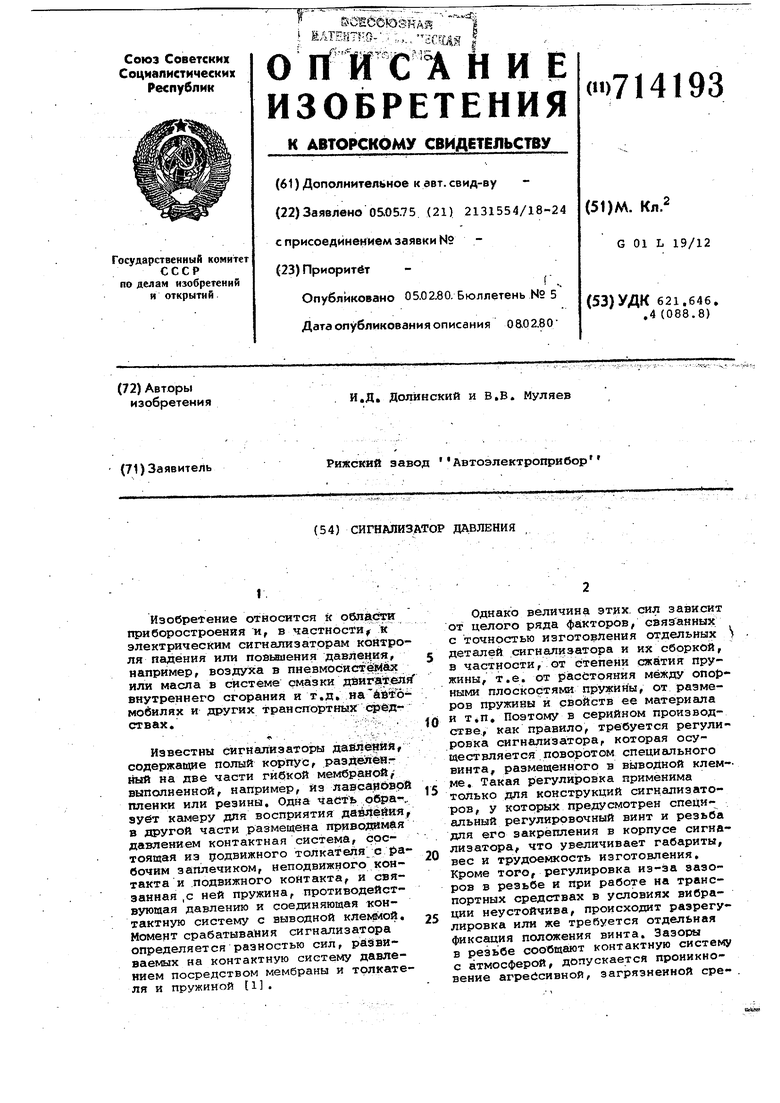
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ ЭЛЕКТРОКОНТАКТНОГО СИГНАЛИЗАТОРА ДАВЛЕНИЯ | 1971 |
|
SU412506A1 |
| Электрический датчик давления | 1975 |
|
SU552532A1 |
| Сигнализатор давления | 1989 |
|
SU1675707A2 |
| Способ регулировки электрического сигнализатора давления | 1990 |
|
SU1797702A3 |
| Сигнализатор давления | 2024 |
|
RU2825172C1 |
| Устройство для измерения давления | 1976 |
|
SU661281A1 |
| СИГНАЛИЗАТОР ДАВЛЕНИЯ УНИВЕРСАЛЬНЫЙ | 2019 |
|
RU2724820C1 |
| Дифференциальный сигнализатор давления | 1989 |
|
SU1688137A1 |
| СИГНАЛИЗАТОР ДАВЛЕНИЯ | 1991 |
|
RU2014582C1 |
| Датчик давления | 1980 |
|
SU883679A1 |
„ - Изобретение относится к области приборостроения и, в частности it электрическим сигнализаторам контроля падения или повьниения давлен.ия, например, воздуха в пневмосистеМах или масла в системе смазки двигатеяг внутреннего сгорания и т.д. наайтомобилях и других транспортных средствах, Известны еигйализаторы давления, содержание полый корпус, раздепейг ный на две части гибкой мембраной, выполненной, например, из лавсайовой пленки или резина. Одна часть . зуёт камеру для восприятия давлейия, в другой части размещена привоЯйМйя давлением контактная система, состоящая из уодвижного толкателя с рабочим заплечиком, неподвижного контакта и .подвижного контакта, и связанная ,с ней пружина, противодействующая давлению и соединяющая контактную систему с выводной . Момент срабатывания сигнализатора определяется разностью сил, развиваемых на контактную систему давлением посредством мембраны и толкателя и пружиной 1.
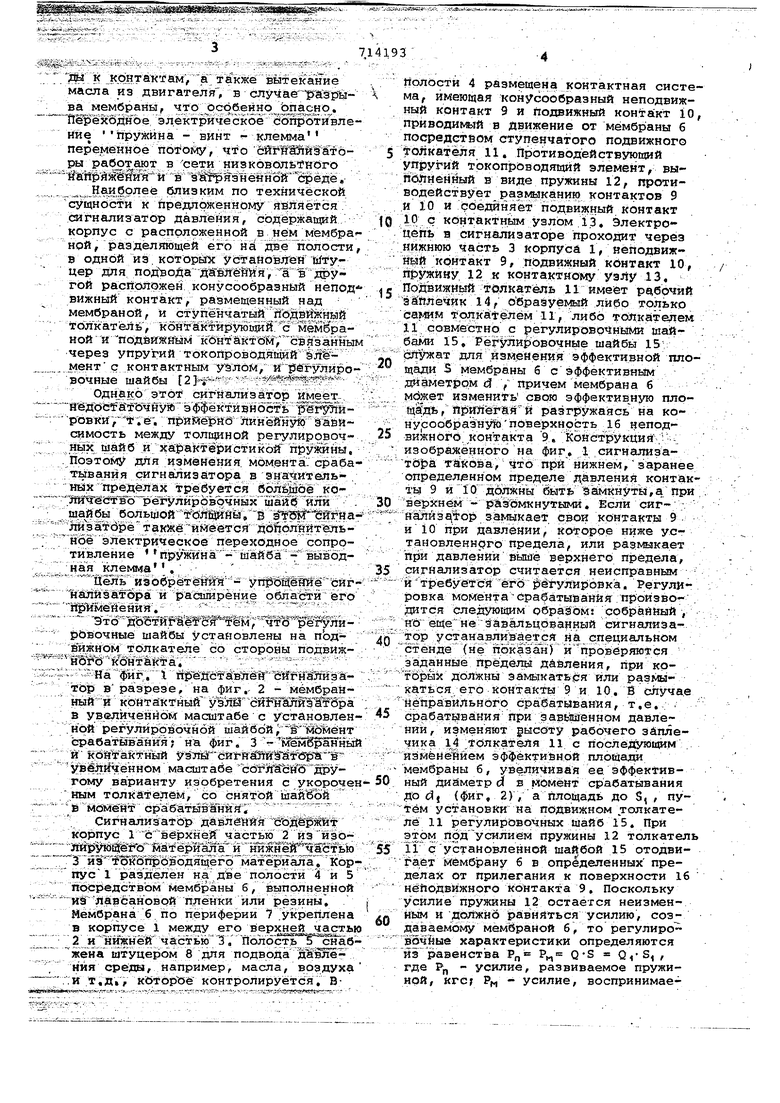
Однако величина этих, сил зависит от целого ряда факторов, связанных с точностью изготовления отдельных деталей сигнализатора и их сборкой, в частности, от степени сжатия пружины, т.е. от расстояния между опорными плоскостями пружины, от размеров пружины и свойств ее материала и . Поэтому в серийном производстве, как правило, требуется регулировка сигнализатора, которая осуществляется .поворотом специального винта, размещенного в в1мвоДной клемме. Такая регулировка применима только для конструкций сигнализаторов, у которых предусмотрен специальный регулировочный винт и резьба для его закрепления в корпусе сигнализатора, что увеличивает габариты, вес и трудоемкость изготовления. Кроме того, регулировка из-за зазоров в резьбе и при работе на транспортных средствах в условиях вибрации неустойчива, происходит разрегулировка или же требуется отдельная фиксация положения винта. Зазоры в резьбе сообщают контактную систему с атмосферой, допускается проникновение ахрейсивной, загрязненной ереVXN к ЖШТак амУ а такжёвытекание масла из двигателя , в случае рй§рыва мембраны, что особенно Ъпасно, ТШрёШЩо е/srteKTiMi ское сопротйвл е нйе пружина - винт клемма переменное потому, что сйгйЭййзаторы работают в сети низковоль ного к в зШ я энеяной бреде, ., Наиболее близким по технической сущности к предложенному является сигнализатор давления, содержащий корпус с расположенной в мёмбра ной, разделяющей его на две полости в одной из которьйс устайовлен йтуцер для подхода дйвлеШя, другой расположен конусообразный непод вижный контакт, размещенный над мембраной, и ступенчатый подвижный толкатель, контактирующий с мембраной и ПОДВИЖНЫМ кОнтакто,связанны через упругий токопроводящий &л%ментс контактным узлом, и регулировочные шайбы /- ; -- - - Одн ако этот сигнализатор имеет йёдоС йФЬчнуЯ) эффектидность psr JiK ровки,т.е; прийё|) лин1ейну 0зави симость между толоданой регулировочных шайб и характеристикой пруяоины. Поэтому для изменения момента, сраба тывания сигнализатора в значительных пределах требуется большое ко Я1 Чёство ре гулиро;вочных шайб или шайбы большой оЛйримы/ В лизатбретакже имеется дойолнитель нбё электрическое переходное сопротивление пружина - шайба - выводная клеиф}а , Цель изобретеки - уп ощёШё сиг налйзатора и расширение области его П|й1менения. Это дЬётйРае№Г ём, чтЪ- ёгулирОвочные шайбы установлены на подйижном толкателе со стороны подвиж н б с5кЪнтйкта, На фиг, t прёДставлеЯ е гнабЙ1заTOj) в разрезе, на фиг,- 2 - мембранный и контактный узлй сйРнЖлЙ&атора в увеличенном масштабе с установлен ной регулировочной шайбой Ж момент срабатывания; на фиг, 3 - мШмВранны и контактный узлы сйгйгй1й1|ат 5ртаё увеличенном масштабе согяаЬнб другому варианту изобретения с укороче ным толкателем, со снятой шайб ой в момент срабатываний Сигнализатор давЛёМия ЪЪдёржйт корпус 1 с верхней частью 2 из изолй1 уй а€г о йатер Гала и нижнеЙ чах;ть о 3 иэ то1 опрово дящего материала, Кор пус 1 разделён на две полости 4 и 5 посредством йембр аны 6, выполненной И&ла1всановой пяенки или резины, Мембрана б по периферии 7 укреплена в корпусе 1 между его верхней часть , , . . - ..---- - .. ..-.,-. t.....-.fttiSa4n«at« Aae ss:a.-: 2 инижней частью 3, Полость 5 снаб жена штуцером 8.для подвоДа дЖвКеНйя среды, например, масла, воздуха :и т.д., кСТорЪё контролируется. В4Полости 4 размещена контактная система, имеющая конусообразный неподвижный контакт 9 и подвижный контакт Ю, приводи№.1й в движение от мембраны б посредетйом ступе11чатого подвижного толкателя 11, Противодействующий упругий токопроводящий элемейт, выполненный в виде пружины 12, противодействует размыканию контактов 9 и 10 и соединяет подвижный контакт 10 с контактным узлом .13, Электроцепь в сигнализаторе проходит через нижнюю часть 3 корпусй 1, неподвижный контакт 9, подвижный контакт 10, пружину 12 к контактному УэЛу 13, Подвижный толкатель 11 имеет ра бочий эаплечик 14, обраэуемый либо только сшдам толкателем 11, либо толкателем И совместно с регулировочными шайбами 15, Регулировочные шайбы 15 служат для изменения эффективной площади S мембраны 6 с эффективным диаметром d , причем мембрана 6 мбжет изменить свою эффектив ную площадь, прилегая и разгружаясь на конурообразнуюповерхность 16 неподвижного ,контакта 9. Конструкция изображенного на фиг, 1 сигнализатОЕ)а такова, что при нижнем, заранее определенном пределе давления контакты 9 и 10 должны быть замкнуты,а при верхнем - разомкнутыми. Если сигйалйзатор замыкает свой контакты 9 и 10 при давлении, которое ниже установленного предела, или размыкает при давлении выше верхнего предела, сигнализатор считается неисправным и требуется его рётулироэка. Регулировка момента срабатывания производится следующим обраёом собранный , но еще не эавальцованный сигнализатор устанавливает ся на специальном стенде (не показан) ипроверяются заданные пределы давления, при которых должны замыкаться или размыкаться его контакты 9 и 10, S случае неправильного срабатывания, т,е, срабатывания при завышенном давлении , изменяют рысоту рабочего зАплечика 14 толкателя Не после б щим изменением эффектийной площади мембраны б, увеличивая ее эффективный дийметр о( в момент срабатывания до dj (фиг, 2), а площадь до S, , путем установки на: подвижном -олкателе 11 регулировочных шайб 15, При этом подусилием пружины 12 толкатель 11 с установленной шайбой 15 отодвигает мембрану б в определенных пределах от прилегания к поверхности 16 неподвижного контакта 9, Поскольку Усилие пружины 12 остается неизменным и должнд равняться усилию, создаваеьюму мемврайой б, то регулиройочйые характеристики определяются ИЗ равенства Р I Q-S Q,-S где Рр, - усилие, развиваемое пружиной, кгс; РМ - усилие, воспринимаемое мембраной, кгс; Q - фактическое давление контролируемой среды, при котором срабатывает сигнализатор; QI заданное давление контролирув мой среды, при котором должен сра.батывать сигнализатор; при соотЬвет. ствующем эффективном диаметре d; и площади 3. в момент срабатывания.
кгс/см ; Sj и
J Р л-.
Saэффективные пло1мади мембраны а момент срабатывания соответственно, при давлениях Q и Q| т.е. при разных высотах рабочего заплечика толкателя, достигнутых .за, счет установки регулировочных шайб причем из этого равенства определяется q Г , где d и соответствующие разные, эффективные диаметры мембраны для COQTветствующих эффективных плоедадей
s и S ,см; Отсюда-й|, г .
. f rj
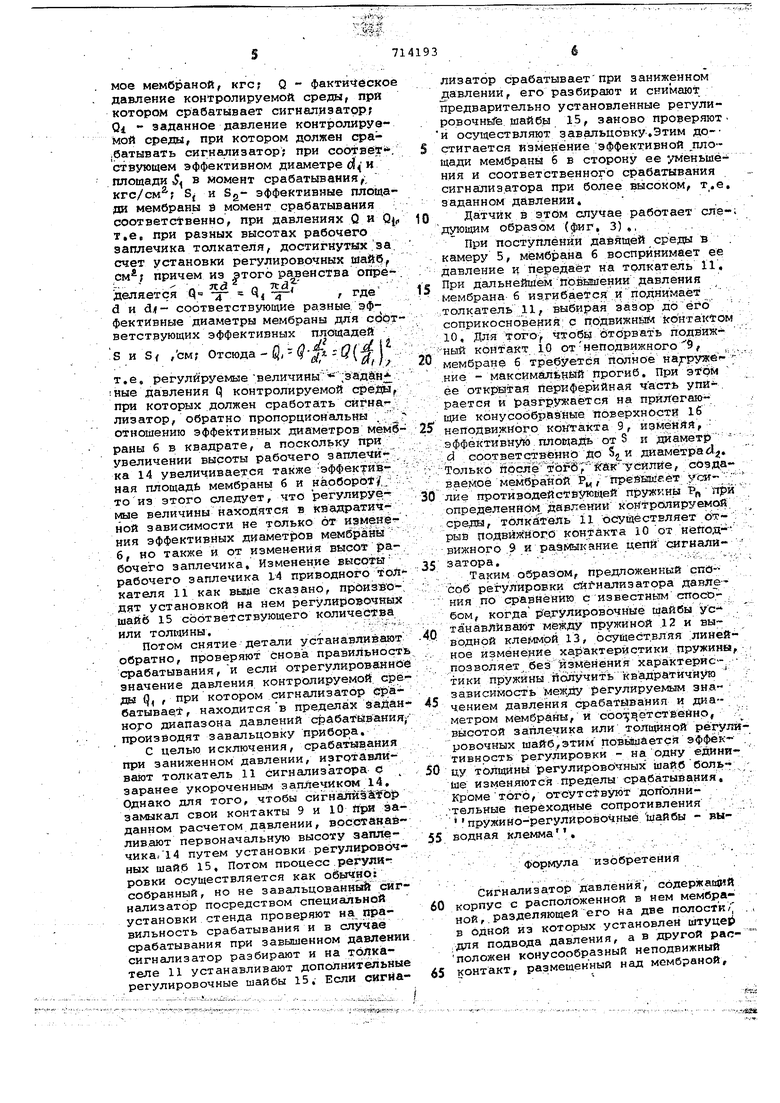
т.е. регулируемые .величины ;задан - ные давления Q контролируемой среды, при которых должен сработать сигна. лизатор, обратно пропорциональны . l отношению эффективных диаметров; Мембраны б в квадрате, а поскольку при увеличении высоты рабочего; заплечй . ка 14 увеличивается также-эффек ив-. ная площадь мембраны б и наоборЬТУ,; /. то из этого следует, что регулируе- мые величины находятся в каадратич ной зависимости не только 6т и эменёния эффективных диамет эОв MeM6piSHa б, но также и от изменения высот ра-. бочего заплечика. Изменение высотй рабочего заплечика 14 приводного тОЛ кателя 11 как выше сказано, прйизво-. дят установкой на Нем регулировочных шайб 15 соответствующегЬ количества или толщины. : -у -:- -Потом снятие детали устанавливают обратно, проверяют снова правильность срабатывания, и если отрегулированной значение давления контролируемой, cipeды Q , при котором сигнализатор йрабатыва т, находитсяв пре.делах йадан- Hojo диапазона давлений с зйбатыв ания;производят завальцовку прибо5)а.
С целью исключения, срабатывания при заниженном давлении, изготавливают толкатель 11 сигнализатора d заранее укороченным запЛечИком 14, Однако для того, чтобы сйгнайизЖ Ь замыкал свои контакты 9 и 10 При заданном расчетом давлении, врсстанавлив.ают первоначальную высоту заплечика(14 путем установки регулировочных шайб 15, Потом процесс .регулй-: ровки осуществляется как обычнс : собранный, но не завальцованный сигнализатор посредством специальной установки стенда проверяют на правильность срабатывания и в случае срабатывания при завышенном давлении. сигнализатор разбирают и на толкателе 11 устанавливают дополнительные регулировочные шайбы 15,- Если сигмализатор срабатываетпри заниженном авлении, его разбирают и снимгдаТ предварительно установленные регулировочные шайбы 15, заново проверяют
и осуществляют завальцовку,Этим до-стигается изменение эффективной площади мембраны 6 в сторону ее уменьшения и соответственного срабатывания сигнализ.атора при более высоком, т.е, заданном давлении. Да:тчйк в этбм случае работает сл8-; дующим образом (фиг, 3) ,, ...
При поступлении давящей среды в камеру 5, мембрана 6 воспринимает ее давление и передаёт на толкатель 11. При дальнейшемПрвшении давления .
мембрана-б изгибается ипрднимаёт . .толкатель 11, выбирая зазор доего соприкосновения: с п.бдвижным крнтактом 10, Лл-я тогоу Чтобы бтdpsать подвиж ный . 10 отнеподвижного f мембрану б требуется полное на руж -; .вне - максймйлбцйй Прогиб, При этом ее открытая периферийная упи-. рается и разгружается на прйлегающие кон у соббр.аэные. Поверхности 16 непоДвижно;го контакта 9, изМенйЯ, .эффективна. площадь от S и диаметр .d соответствённЬдо диамётрас -;, Только йбслетогё7 йк-усилие, создав.аем.оё мембраной 1Р„ , прейКЕее.ёт лие протйэодейсТй дащей пружкны TPf,
определенном. Давлении; контролируемой; ;
среда, толкатель 11 ОсутаёстЕляет
рыв подвйжного контакта 10от непод- вижного .9 и размыкание цеПй сигнали- ;. затора, . ;, ---;; :.-;:... -vv ; . .Таким образом, предложенный спо---
соб регулировки сигнализатора давЯения по сравнению сизвестнымспоссГ- ..
бом, когда ре.гуяировочныё шайбы ус- . .
танавяйвайт между пружиной .12 и вы
водной клеммой 13, осуществляя :линейное изменение характеристики пружина, позволяет, бей изменения хараКтеряс тики пружины .йблучить квадратйчную :/ зависимостьМеж.ду регулируемым зн.а. ; чением давления срабатывания и диаметром мембраны,и соо- в/еТстшейнр, .. высотой заплечика или толщиной регулировочных шайб, этим повыцзйется эффёк- ; тивнрсть; регулировки - на одну единицу толщины регулировочных шайб болье изменяются пределы срабатывания . КрометбгЪ, отсутствуют допЪлниельные переходные сопротивления . .. : пружино-регулировоЧныёЫайбы - выводная клемма.
формула изобретения
Сигнализатор давлений , сОдержасоий корпус с расположенной в нем мембр аной, разделяющей его на две полости/, ., в Одной из которых установлен штуцсц для подвода давления, а в другой рас- положен конусообразный неподвижный контакт, размещенный над мембраной. , .. . .. , . .,- ,,,:; , , и ступенчатый подвижный толкатель, контактирующий с мембраной и подвижным контактом, связанным через, упругий токопроводя1ций элемент с контакт ным узлом, и регулировочные шайбы, о,т Л и ч а ю щ и и с я тем/ что, с целью упрощения сигнализатора и рйсишрения области его применения,ре гулировочные шайбы устайовлёны на подвижном толкателе со стороны под вижиого контакта. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельст.во СССР № 412506, кл.С01 L 19/12, 1972. 2.Авторское свидетельство СССР № 263947, кл. G 01 L19/12, 1965 (прототип),
