(54) КАНАЛ ТОЧНОГО ОТСЧЕТА ПРЕОБРАЗОВАТЕЛЯ
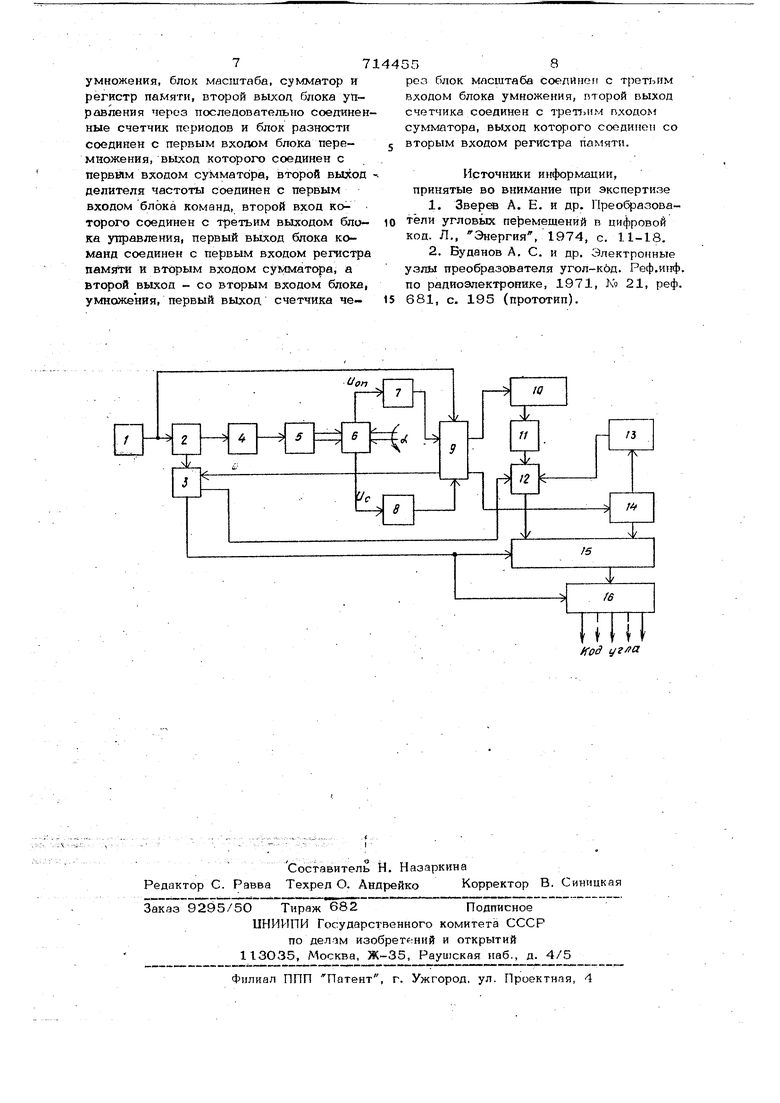
УГОЛ-КОД Целью иообретсння является повышение точности преобрасюватсля в канале точного отсчета спараметрическим пре образователем масштаба угла. Это постигается тем, что в канал точного отсчета преобразователя уг1бл-ко введены блок команд, счетчик периодов, блок разности, блок умножения, блок масштаба, сумматор и регистр памяти, второй выход блока управления через йЬейёДовательно соединенные счетчик периодов и блок расзности соединен с первым входом блока умножения, выход KoTdporo соединен с первым входом сум матора, второй выход делителя частоты соединен с первым входом блока команд, второй вход которого соединен с третьим выходом блоки управления, первый выход блока команд соединен с пёр вым входом регистра Памяти и вторь1м входом сумматора, а второй выход - со вторым входом блока умножения, первый выход счетчика через блок масштабирования соединен с третьим входом блока умножения, второй выход счетчика соединен с третьим входом сумматора, выход которого соединен со вторым входом регистра па1дяти.V Сушность изобретения состоит в том ЧТО для устранения частотной модуляции определяют фазу не кодированием времёйно -рГПнГёрвала между нуль-перехо дайи сигнального и опорного напряжений UH t а кодированием отношения временного интервала к периоду сигнала в текущий момент времени, т.е. , , .; .; ™27t где т TjjВлияние фазовой модуляции с частотой . Ьращёиия ротора микродвигателя устрайяётйя суммированием результатов N преобразований, где каждое преобрабова нйе осуществляется в моменты времени ) равные СЛО измерений за оборот, как правило, 8, 16, 32 и т.д; SI - частота вращения ротора., Опбрнйе и сИгнальное напряженйё с параметрического преобразователя масштаба угла подаются на нуль-индикаторы, фиксирующие момент перехода че. рёз нуль от отрщательной к положительной полуврл1 е. В этот момент они выдают короткие-, импульсы , фронт на Шастаййя коаорых оп рёдМяёТ- разрёшаю|.цую способность измерения. Временной 1нтервал, пропорциональный фазовому сдвигу, формируется в блоке управления, иВ. течение длительности этого интервала импульсы эталонной частоты поступают на вход счетчика. Количество импульсов, подсчитанное да, время, пропорционально фазовому сдвигу между опорным и сигнальным напряжениями. Так как сигналы с параметрического фазоврашателя искажены амплитудной и фазовой модуляциями с частотой, определяемой скоростью врашбния микродвигателя, а измерения фазы происходят многократно за период паразитной модуляции, то число в счетчике периодически измеряется. Появляется дребезг показаний. Характер и величина дребезга в порйдке возрастания определяются: амплитудной модуляцией, неравномерностью скорости вращения и фазовой модуляцией. Подавление паразитной фазовой модуляции осуществляется блоками. Импульсы после нульиндикаторов поступают на фазовый детектор. Избирательный усилитель выделяет и усиливает составляющую с частотой фазовой модуляции, которая воздействуя на нуль-индикатор, вызывает изменения, обратные паразитному изменеш1Ю фазы сигнала. Изменения показаний от нестабильности скорости Вращения обусловлены тем, что частота сигналов, снимаемых с параметрического преобразователя масштаба угла, получается переменной, тогда как частота заполняющих импульсов постоянна. С целью компенсации этой составляющей погрещности фазовый детектор выявляет на частоте выходного сигнала параметрического преобразователя масштаба угла колебания ротора микродвигателя и после фильтрации его фиЛьтрОм нИжнИХ частот подает на эле-. мент управления. На чертеже приведена блок-схема точного отсчета преобразователя У1Х1Л-КОД. Канал точного отсчета преобразователя угол - код содержит генератор 1 импульсов, делитель частоты 2, блок 3 команд, усилитель 4, микродвигатель 5, параметрический преобразователь 6 угла, нуль - индикаторы 7 и 8, €лок 9 управления, счетчик 10 периодов, блок 11 разности, блок 12 умножения, блок 13 масштаба, счетчик 14, сумматор 15, регистр 16 памяти. Выход усилителя 4 подключен ко входу микродвигателя 5, вал которого соединен с одним входом параметрического преобразователя масштаба 6 угла, а второй его вход соединен с исследуемым валом. Два выхода параметрического пре Ьбразователя масигтабГа 6 угла подключены через нуль-индикаторы 7 и 8 ко входам блока 9 управления, выход которого соединен со входом счетчика 10 периодов. Выход генератора 1 импульсов подключен ко входу делителя частоты 2 и к другому входу блока 9 управ ления. Выход делителя 2 частоты подключен ко входу усилителя 4 и к одно-, му из входов блока 3 , команд, к другому входу которого подключен второй выход блока 9 управления. Выход счетчика 10 периодов через блок 11 разности подключен к одному из входов блока 12 умножения , другие входы которого соединены с одним из выходов блока 3 команд и с выходом блока 13 масштаба, вход последнего через счетчик 14 угла подключен к третьему выходу блока 9 управления. Выход блока 12 умножения и другой выход счетчика 14 угла подключены к вхбдам сумматора 15, другой вход которого и один из входов регистра 16 памяти Соединены с другим выходом блока 3 команд, выход сумматора 15 подключен к другому входу регистра 16 памяти.. По цепи генератор 1 импульсов, делитель частоты 2, усилитель 4 мощности осуществляется питание синхронного мик родвигателя 5 параметрического преоб разователя 6 угла. (Микродвигатель вращает общий ротор модулирующий элемент опорного и сигнального каналов. Модулируемый элемент (статор) опорного напряжения жестко закреплен и не имеет связи с сигнальным элементом, который связан с входным (измерительным) валом. При повороте вала сигнального элемента параметрического преобразователя %а угол d , фаза выходного сигнального напряжения изменяется на Zc относительно фазы опорного напряжения, гдег- коэффициент преобразования масщтаба угла. Переходы через нуль напряжений опорного и сигнального каналов определяются нуль - иадйкаторами 7 н 8. Блок 9 управления совместно с блоком кома;«д определяет время t , исходя из заданного N - 8, 10, 32, как1. ИЛ - скорость вращения микродвигате ля, N - число измерений за оборот, н формирует интервал времени пропорциональный сдвигу фаз между первыми гармониками опорного и сигнального напряжений. В течении интервала времени счетчик 14 угла заполняется импульсами от генератора 1. Управление счетчиком 10 периодов осуществляется через нуль-инднкатор 7 блоком 9 управления и блоком 3 команд. После кодирования периода и угла происходит обработка результатов. В блок 11 разности из счетчика 10 периодов переносится , с учетом знака, разность между расчетным перио- . дом и измеренным. Информация со старших разрядов счетчика 14 угла поступает на блок 13 масштаба, который в зависимости от фазового сдвига сигнального напряжения определяет масштаб пересчета разности периодов. Умножение величины разности периодов на масштабный коэффициент происходит в блоке 12 умножения. Результат из блока 12 умножения переносится в младшие разряды сумматора 15, куда поступает и код из счетчика 14 угла. Перенос в регистр 16 памяти кода из сумматора 15 производится один раз за период вращения ротора микродвиг-ателя. Предлагаемое устройство канала точного отсчета позволяет практически полностью устранить периодически изменяющиеся во времени погрешности преобразователей угол- кодспараметрическимидатчиками угла. Величину суммарной, погрешности удалось снизить с 40-30 утл сек до l-f2 угл.секГ на том же образце, датчика. .. Формула изобретения Канал точного отсчета преобразователя угол-код, содержащий генератор импульсов, выход которого соединен с первым входом блока управленийТ вхоЬом делителя частоты, первый которого через усилитель соединен с микродвигателем, кинематически соединенным с параметрическим преобразователем угла, выходы которого через соответствующие нуль индикаторы соединеги) со вторым и третьим входом блока управления, первый выход которого соединен со входом счетчика, отличающийся тем, что, с целью повышения точности преобразователя, в него введены блок команд, счетчик периодов, блок разности,-блок
умножения, блок масштаба, сумматор и регистр памяти, второй выход блока ytiравпения терсз последовательно соединенные счетчик периодов и блок разности соединен с первым входом блока перемножения, выход которого соединен с первим входом сумматора, второй выход делителя частоты соединен с первым входом блока команд, второй вход которого соединен с третьим выходом блока управления, первый выход блока команд соединен с первым входом регистра памяти и вторым входом сумматора, а второй выход - со вторым входом блока, умножения, первый выход счетчика через блок масштаба соедйнсм с третьим входом блока умножения, второй выход счетчика соединен с трет1)ИМ входом сумматора, выход которого соединен со вторым входом регистра памяти.
Источники информации, принятые во внимание при экспертизе
1.Зверев А. Е. и др. Преобразоватёли углов ох перемещений в цифровой
код. Л,, Энергия, 1974, с. 11-18.
2.Буданов А. С. и др. Электронные узлы преобразователя угол-кбд. Реф.инф. по радиоэлектронике, 1971, № 21, реф.
681, с. 195 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой фазометр | 1982 |
|
SU1061062A1 |
| Двухотчетный преобразователь углового перемещения в цифровой код | 1975 |
|
SU526932A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU732955A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU771115A2 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| СПОСОБ МНОГОКАНАЛЬНОГО АДАПТИВНОГО ПРИЕМА РАДИОСИГНАЛОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2477551C1 |
| Цифровое устройство измерения параметров гармонических сигналов | 1984 |
|
SU1182425A1 |
| Устройство для предварительной фильтрации входных сигналов узкополосных цифровых фильтров | 1990 |
|
SU1739481A1 |
| Формирователь случайных сигналов | 1990 |
|
SU1732419A1 |
