I
Изобретение относится к области сельскохозяйственного машиностроения и может быть использовано при конструировании хлопкоуборочных машин.
Известно приспособление к хлопкоуборочному аппарату для улавливания хлопкасырца, содержащее улавливатели в виде роторов с эластичной поверхностью, установленные за шпиндельными барабанами 1.
Недостатком этого приспособления является то, что оно не способно убирать хлопок с поверхности гребня и склонов грядки. Тем самым снижается полнота сбора хлопка аппаратом.
Целью изобретения является увеличение полноты сбора хлопка.
Цель достигается тем, что в предлагаемом приспособлении роторы расположены наклонно поперек направления движения аппарата и имеют вогнутую поверхность, охватывающую наружный контур задней части шпиндельного барабана.
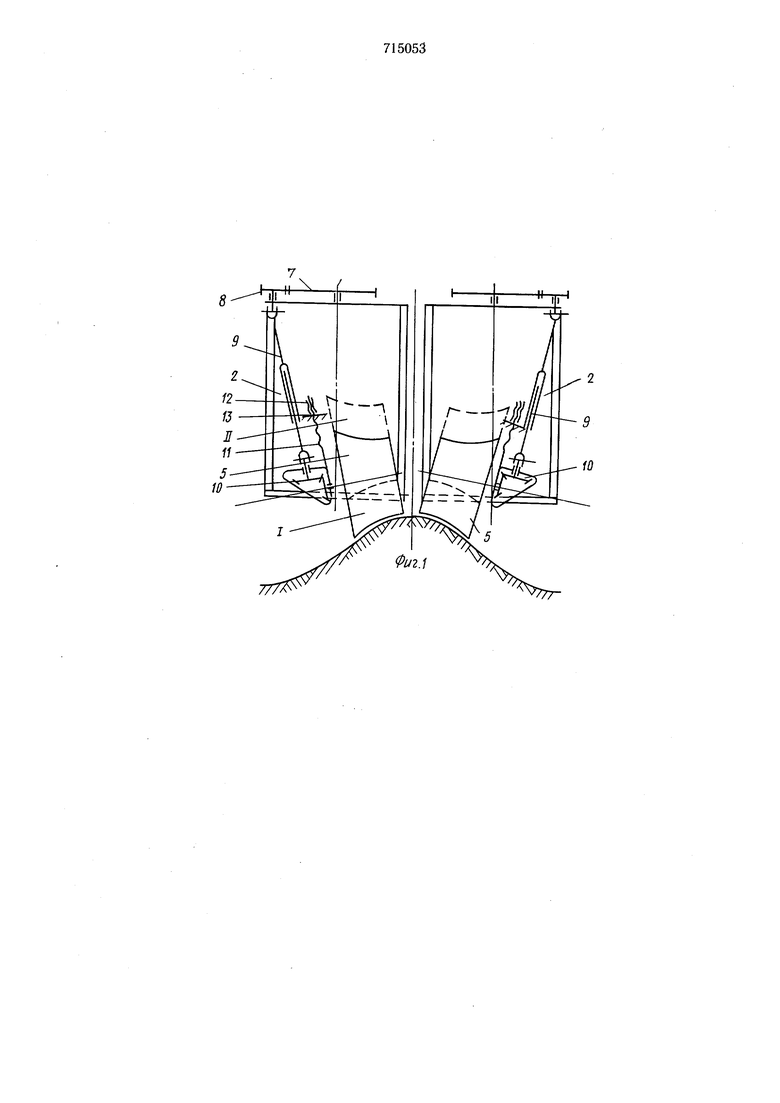
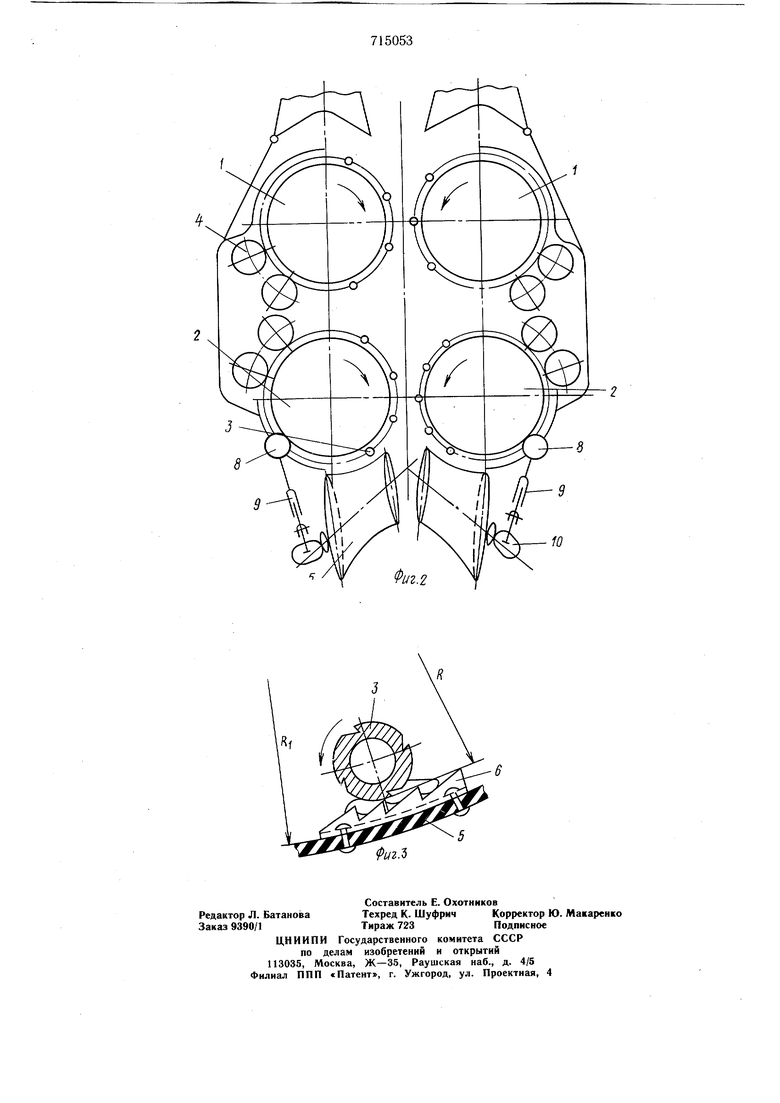
На фиг. 1 показан хлопкоуборочный аппарат, вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 - взаимное расположение шпинделя барабана и захватывающего элемента эластичного катка.
Хлопкоуборочный аппарат содержит переднюю 1 и заднюю 2 пары шпиндельных
барабанов с вращающимися шпинделями 3 и съемниками 4. На раме шпиндельных барабанов, за ними, установлены эластичные вращающиеся в подшипниках роторы 5 с закрепленной на них, например, пильчатой, зубчатой или другой, гарнитурой 6. Привод эластичные роторы 5 получают от большой шестерни 7 шпиндельного барабана через малую шестерню 8, карданный телескопический вал 9 и конический редуктор 10, на выходном валу которого установлены
эластичные роторы 5. Корпус конического редуктора жестко связан с регулировочным винтом 11, на котором помещается регулировочная гайка 12,. упирающаяся одной плоскостью в неподвижный упор 13, жестко закрепленный на раме щпиндельного аппарата. Ось роторов 5 наклонена поперек направления движения аппарата, и поверхность роторов выполнена вогнутой так, что в горизонтальной проекции она охватывает наружный контур задней чаоти шпиндельного барабана 2.
Хлопкоуборочный апп: ;)ат работает следующим образом.
При движении хлопкоуборочной машины по полю передняя 1 и задняя 2 пары шпиндельных барабанов обрабатывают куст хлопчатника, снимают часть xjOnKa-сырца шпинделями 3 и с помошью съемников 4 передают собранный хлопок в приемно-транспортную пневматическую сист- му.
При этом на первом и втором сборах эластичные враш,аюшиеся роторы 5 установлень. в положении II (фиг. 1) над поверхностью грядки.
Основная масса хлопка-сырца опадает на землю при выходе куста хлопчатника из рабочей зоны последней пары шпиндельных барабанов и попадает на захватывающие элементы гарнитуры 6 эластичных вращающихся роторов 5. Затем хлопок, попавший на ротор 5,. переносится к шпиндельному барабану 2, где вращающиеся шпиндели перехватывают хлопок (фиг. 2 и 3) и уносят его к съемникам 4, и т. д.
При работе же хлоп} уборочного аппарата на третьем сборе, когда между передней 1 и задней 2 парами шпиндельных барабанов устанавливается приспособление для дробления курака (), эластичные роторы 5 переводятся в положение 1 (фиг. 1) до соприкосновения с-повер- ностью грядки.
Это производят перемещением винта 11 вниз, вращая гайку 12, опирающуюся на неподвижный упор 13. Передвигаясь вниз, винт 11 переводит в нижнее {положение вместе с редуктором 10 ротор 5 и подвижную часть телескопического карданного вала 9.
Перекатываясь по грядке, эластичные роторы копируют профиль гребня и с помощью захватывающих элементов подбирают хлопок, лежащий на поверхности гребня рядка. Кро.ме того, на эластичные роторы попадает хлопок нижних коробочек куста хлопчатника, не захваченный щпиндельными барабанами. Распрямляющиеся ветки куста хлопчатника после выхода из рабочей зоны последней пары 2 шпиндельных барабанов погадают на поверхность эластичных роторов 5. На поверхность эластичных роторов попадают и хлопковые дольки, свободно осыпающиеся при выходе куста из рабочей зоны последней пары шпиндельных барабанов.
Весь хлопок, попавший на поверхность эластичного ротора 5, удерживается на нем с помощью захватывающих элементов гарнитуры 6 и по мере вращения ротора 5 переносится к быстро вращающимся шпинделям, которые перехватывают хлопковые дольки с ротора 5 (фиг. 3), уносят их к съемникам 4 и т. д.
Для того, чтобы взаимодействие шпиндельного барабана 2 и эластичного ротора 5 способствовало наиболее полному и качественному съему хлопка, поверхность ротора (фиг. 2 и 3) имеет криволинейную конфигурацию, причем радиус Ri кривизны образуюшей поверхности ротора больше радиуса R шпиндельного барабана по внешним точкам шпинделей. Вращаются эластичные роторы в сторону вращения ведуших колес хлопкоуборочной машины.
Установка за последней парой шпиндельных барабанов эластичных вращающихся роторов позволяет увеличить полноту сбора хлопка-сырца как на первых, так и на поJ следующих сборах за счет улавливания и дополнительного сбора и подбора той части хлопка-сырца, которая в известных хлопкоуборочных аппаратах падает на землю.
Формула изобретения
Приспособление к хлопкоуборочному аппарату для улавливания хлопка-сырца, содержащее улавливатели в виде роторов с эластичной поверхностью, установленные за шпиндельными барабанами аппарата, отличающееся тем, что, с целью увеличения полноты сбора хлопка, роторы расположены наклонно поперек направления движения аппарата и имеют вогнутую поверхность, охватывающую наружный контур задней части шпиндельного барабана.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 250582, кл. А 01 D 45/18, 1968.
10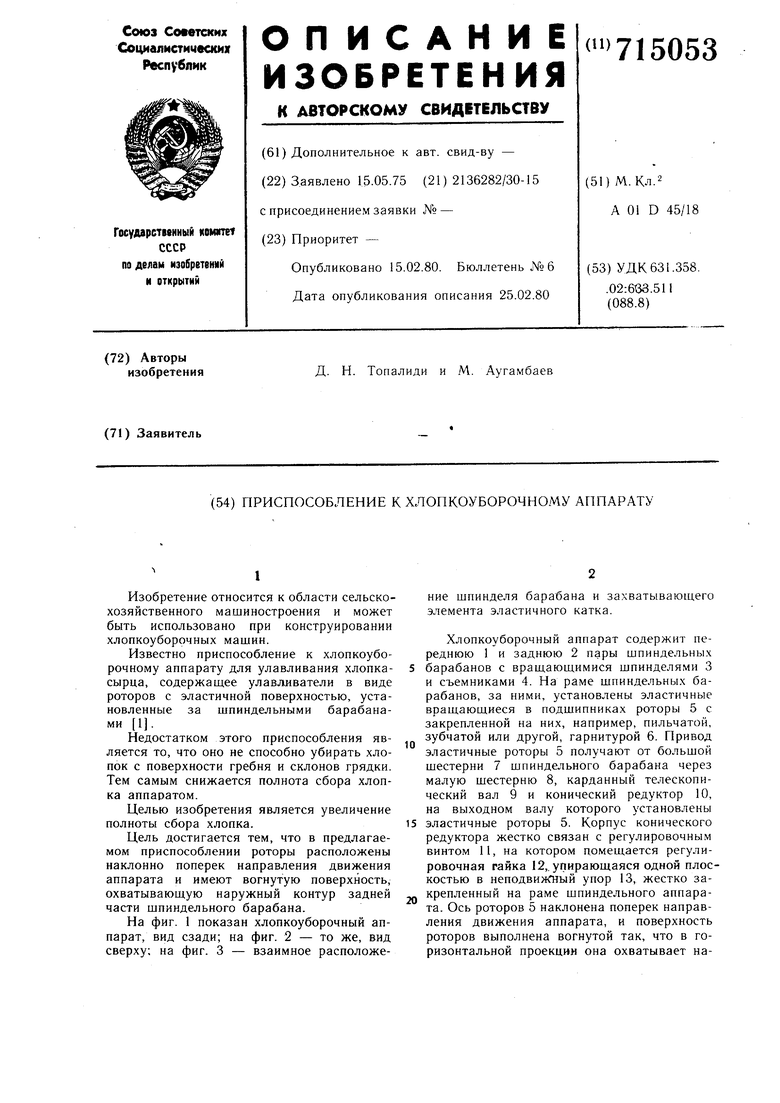
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1976 |
|
SU628845A1 |
| ОДНОРЯДНЫЙ ВЕРТИКАЛЬНО-ШПИНДЕЛЬНЫЙ АППАРАТ ДЛЯ СБОРА ХЛОПКА-СЫРЦА | 2011 |
|
RU2462861C1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1752261A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1338803A2 |
| Аппарат для уборки хлопка из раскрывшихся коробочек и курака | 1979 |
|
SU772511A1 |
| Хлопкоуборочный аппарат | 1981 |
|
SU978771A1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1743457A1 |
| Хлопкоуборочная машина | 1949 |
|
SU92896A2 |
| Хлопкоуборочный аппарат | 1979 |
|
SU824907A1 |
| Хлопкоуборочный аппарат | 1977 |
|
SU624586A1 |