ромагнитиой планкой за счет сил магнитного взаимодействия планка увлекает за собой маятник, внося тем самым ногрешность отсчета и понижая точность устройства.
Наиболее близкое к изобретению техническое решение - устройство для определения угла наклона подвижного объекта, содержащее измерительный маятник с грузом, дополнительный маятник, подвешенный независимо соосно с измерительным, демпфируюш,ее устройство и измерительную схему .
Цель изобретения - упрош,ение конструкции и расширение диапазона измеряемых углов.
Цель достигается тем, что в предлагаемом устройстве груз измерительного маятника выполнен в виде постоянного магнита, а дополнительный маятник снабжен 17-образной планкой, охватывающей груз измерительного маятника, при этом периоды колебаний дополнительного и измерительного маятников относятся как 10: 1.
Дополнительный маятник, имеющий больший период колебаний, чем измерительный как более инерционный не будет успевать отклоняться от разного рода ускорений, вызванных толчками, вибрациями, будет одновременно демпфировать измерительный маятник, являясь для него фильтром, не пропускающим динамические помехи.
Так как дополнительный маятник жестко не закреплен на корпусе устройства, качающемся вместе с объектом, он не увлекает измерительный маятник в качание, а всегда стремится удержать вертикаль места вместе с измерительным маятником (не давая ему колебаться от помех).
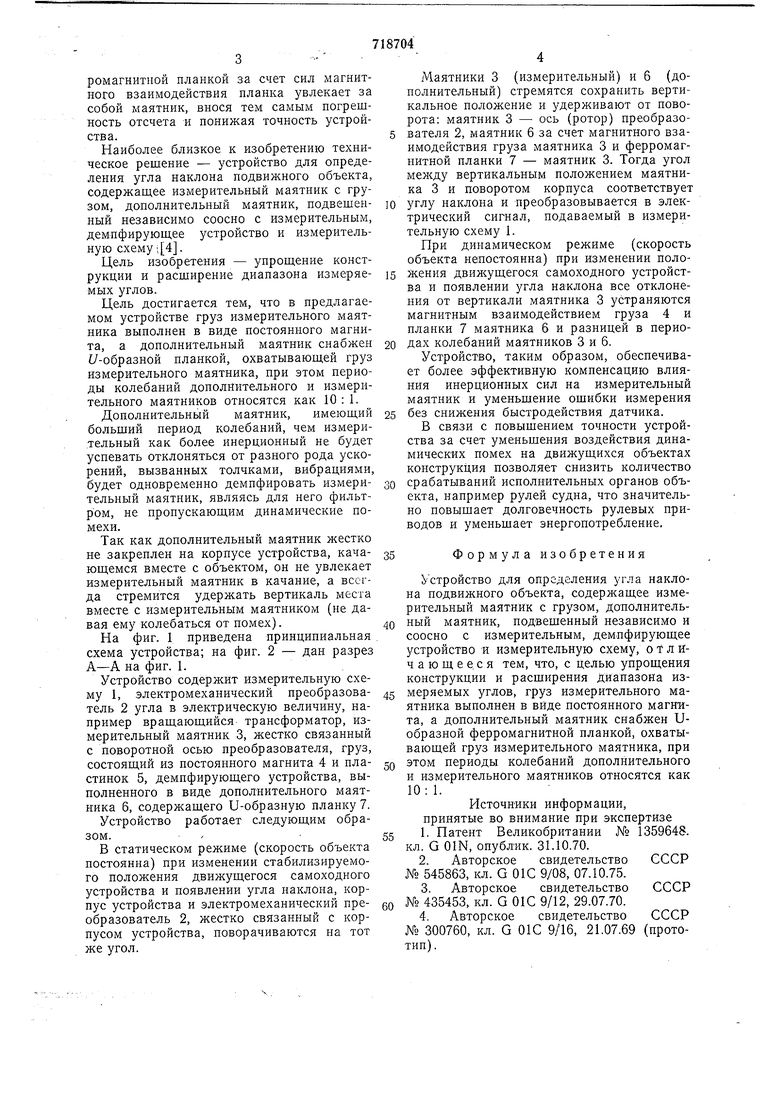
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - дан разрез А-А на фиг. 1.
Устройство содержит измерительную схему 1, электромеханический преобразователь 2 угла в электрическую величину, например вращающийся трансформатор, измерительный маятник 3, жестко связанный с поворотной осью преобразователя, груз, состоящий из постоянного магнита 4 и пластинок 5, демпфирующего устройства, выполненного в виде дополнительного маятника 6, содержащего U-образную планку 7. Устройство работает следующим образом.
В статическом режиме (скорость объекта постоянна) при изменении стабилизируемого положения движущегося самоходного устройства и появлении угла наклона, корпус устройства и электромеханический преобразователь 2, жестко связанный с корпусом устройства, поворачиваются на тот же угол.
Маятники 3 (измерительный) и 6 (дополнительный) стремятся сохранить вертикальное положение и удерживают от поворота: маятник 3 - ось (ротор) преобразователя 2, маятник 6 за счет магнитного взаимодействия груза маятника 3 и ферромагнитной планки 7 - маятник 3. Тогда угол между вертикальным положением маятника 3 и поворотом корпуса соответствует
углу наклона и преобразовывается в электрический сигнал, подаваемый в измерительную схему 1.
При динамическом режиме (скорость объекта непостоянна) при изменении положения двил ущегося самоходного устройства и появлении угла наклона все отклонения от вертикали маятника 3 устраняются магнитным взаимодействием груза 4 и планки 7 маятника 6 и разницей в периодах колебаний маятников 3 и 6.
Устройство, таким образом, обеспечивает более эффективную компенсацию влияния инерционных сил на измерительный маятник и уменьшение ошибки измерения
без снижения быстродействия датчика.
В связи с повышением точности устройства за счет уменьшения воздействия динамических помех на движущихся объектах конструкция позволяет снизить количество
срабатываний исполнительных органов объекта, например рулей судна, что значительно повышает долговечность рулевых приводов и уменьшает энергопотребление.
Формула изобретения
Устройство для определения угла наклона подвижного объекта, содержащее измерительный маятник с грузом, дополнительный маятник, подвешенный независимо и соосно с измерительным, демпфирующее устройство и измерительную схему, отличающееся тем, что, с целью упрощения конструкции и расширения диапазона измеряемых углов, груз измерительного маятника выполнен в виде постоянного магнита, а дополнительный маятник снабжен Uобразной ферромагнитной планкой, охватывающей груз измерительного маятника, при
этом периоды колебаний дополнительного и измерительного маятников относятся как 10:1.
Источники информации, принятые во внимание при экспертизе
Патент Великобритании № 1359648. кл. G ОШ, опублик. 31.10.70.
2.Авторское свидетельство СССР № 545863, кл. G 01С 9/08, 07.10.75.
3.Авторское свидетельство СССР № 435453, кл. G 01С 9/12, 29.07.70.
4.Авторское свидетельство СССР № 300760, кл. G 01С 9/16, 21.07.69 (прототип).
/Й-А
A oi
Л
гКГ
Q
о
:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углов наклона на движущихся объектах | 1979 |
|
SU864007A2 |
| Устройство для определения угла наклонаОб'ЕКТА | 1979 |
|
SU838338A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА НА ДВИЖУЩИХСЯ ОБЪЕКТАХ | 1970 |
|
SU435453A1 |
| Устройство для определения угла наклона подвижного объекта | 1978 |
|
SU777423A1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| Устройство для определения угла наклона подвижного объекта | 1984 |
|
SU1250850A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| Устройство для определения изменения углов наклона объекта | 1975 |
|
SU561866A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |

