(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА НА ДВИЖУЩИХСЯ ОБЪЕКТАХ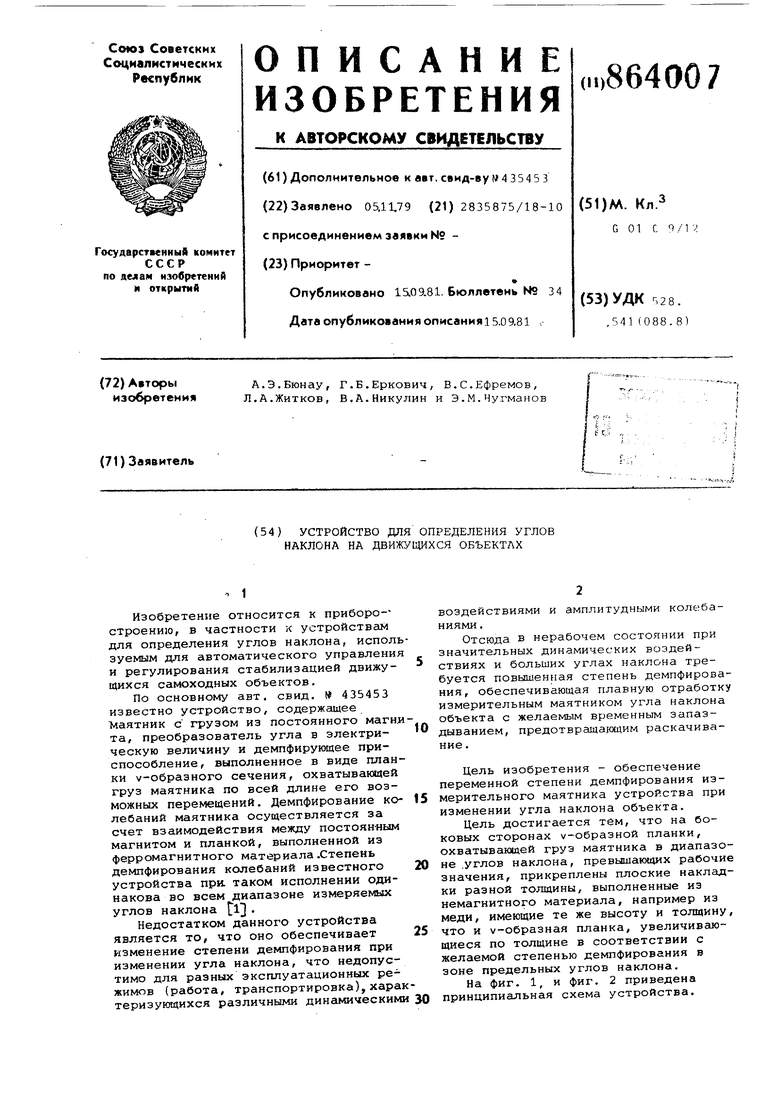
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла наклона подвижного объекта | 1978 |
|
SU718704A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА НА ДВИЖУЩИХСЯ ОБЪЕКТАХ | 1970 |
|
SU435453A1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| Устройство для определения угла наклона подвижного объекта | 1978 |
|
SU777423A1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ ОХРАННОЙ СИГНАЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2044666C1 |
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1409753A2 |
| Универсальный бесконтактный измерительный преобразователь тока | 1990 |
|
SU1739307A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| Устройство включения охранной сигнализации транспортного средства | 1986 |
|
SU1390088A1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
Изобретение относится к приборостроению, в частности к устройства для определения углов наклона, исполь зуемым для автоматического управления и регулирования стабилизацией движущихся самоходных объектов. По основному авт. свид. 435453 известно устройство, содержащее лаятник с хтзузом из постоянного магни та, преобразователь угла в электрическую величину и демпфирующее приспособление, выполненное в виде план ки v-образного сечения, охватывающей груз маятника по всей длине его возможных перемещений. Демпфирование ко лебаний маятника осуществляется за счет взаимодействия между постоян-ным магнитом и планкой, выполненной из ферромагнитного материала .Степень демпфирования колебаний известного устройства при. таком исполнении одинакова во всем диапазоне измеряемых углов наклона Недостатком данного устройства является то, что оно обеспечивает изменение степени демпфирования при изменении угла наклона, что недопустимо для разных эксплуатационных режимов (работа, транспортировка), хара теризующихся различными динамическим воздействиями и амплитудными колебаниями . Отсюда в нерабочем состоянии при значительных динамических воздействиях и больших углах наклона требуется повышенная степень демпфирования, обеспечивающая плавную отработку измерительным маятником угла наклона объекта с желаемым временным запаздыванием, предотвращающим раскачивание . Цель изобретения - обеспечение переменной степени демпфирования измерительного маятника устройства при изменении угла наклона объекта. Цель достигается тем, что на боковых сторонах v-образной планки, охватывающей груз маятника в диапазоне .углов наклона, превышающих рабочие значения, прикреплены плоские накладки разной толщины, выполненные из немагнитного материала, например из меди, имеющие те же высоту и толщину, что и v-образная планка, увеличивающиеся по толщине в соответствии с желаемой степенью демпфирования в зоне предельных углов наклона. На фиг. 1, и фиг. 2 приведена принципиальная схема устройства.
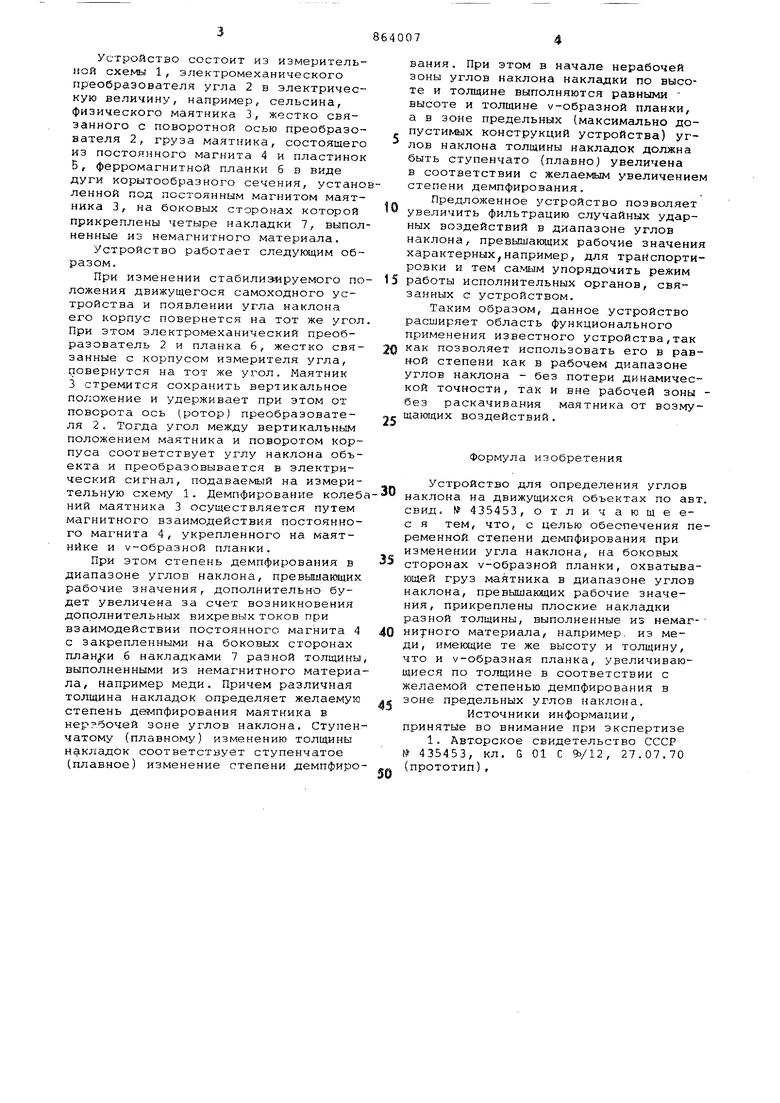
Устройство состоит из измерительной схемы 1, электромеханического преобразователя угла 2 в электрическую величину, например, сельсина, физического маятника 3, жестко связанного с поворотной осью преобразователя 2, груза мaятi икa, состоящего из постоянного магнита 4 и пластинок Б, ферромагнитной планки 6 в виде дуги корытообразного сечения, устаноленной под постоянным магнитом маятника 3, на боковых сторонах которой прикреплены четыре накладки 7, выполненные из немагнитного материала.
Устройство работает следующим образом.
При изменении стабилизируемого положения движущегося самоходного устройства и появлении угла наклона его корпус повернется на тот же угол При этом электромеханический преобразователь 2 и планка 6, жестко связанные с корпусом измерителя угла, повернутся на тот же угол. Маятник 3 стремится сохранить вертикальное полох ение и удерживает при этом от поворота ось (ротор) преобразователя 2 с Тогда угол между вертикальным положением маятника и поворотом корпуса соответствует углу наклона объекта и преобразовывается в электрический сигнал, подаваемый на измерительную схему 1. Демпфирование колебний маятника 3 осуществляется путем магнитного взаимодействия постоянного магнита 4, укрепленного на маятнике и v-образной планки.
При этом степень демпфирования в диапазоне углов наклона, превышающих рабочие значения, дополнительно будет увеличена за счет возникновения дополнительных вихревых токов при взаимодействии постоянного магнита 4 с закрепленными на боковых сторонах плавней 6 накладками 7 разной толщины выполненными из немагнитного материала, например меди. Причем различная толщина накладок определяет желаемую степень демпфирования маятника в нерабочей зоне углов наклона. Ступенчатому (плавному) изменению толщины накладок соответствует ступенчатое (плавное) изменение степени демпфирования. При этом в начале нерабочей зоны углов наклона накладки по высоте и толщине выполняются равньлми высоте и толщине v-образной план-ки, а в зоне предельных {максимально допустимых конструкций устройства) углов наклона толщины накладок должна быть ступенчато (плавно) увеличена в соответствии с желаемым увеличением степени демпфирования.
Предложенное устройство позволяет увеличить фильтрацию случайных ударных воздействий в диапазоне углов наклона, превышакицих рабочие значения характерных например, для транспортировки и тем самым упорядочить режим
5 работы исполнительных органов, связанных с устройством.
Таким образом, данное устройство расширяет область функционального применения известного устройства,так
0 как позволяет использовать его в равной степени как в рабочем диапазоне углов наклона - без потери динамической точности, так и вне рабочей зоны без раскачивания маятника от возмущающих воздействий.
Формула изобретения
Устройство для определения углов
наклона на движущихся объектах по авт. свид. № 435453, отличающеес я тем, что, с целью обеспечения переменной степени демпфирования при изменении угла наклона, на боковых
сторонах v-образной планки, охватывающей груз маятника в диапазоне углов наклона, превышающих рабочие значения, прикреплены плоские накладки разной толщины, выполненные из немаг-
ни гного материала, например, из меди, имеющие те же высоту и толщину, что и v-образная планка, уреличивающиеся по толщине в соответствии с желаемой степенью демпфирования в
зоне предельных углов наклона.
Источники информации, принятые во внимание при экспертизе
(прототип),
J
(риг 1
