..% .-. :...1
.Изобретение относится к технике автоматического управления и предназначено для регулирования технологических параметров в хим.ической, металлургической, нефтегазовой, пищевой и других отраслях народного хозяйства.
Известны ПИД-регуляторы, содержащие последовательно соединенные блок предварения и ПЙ-регулирующее устройство 1.
Эти регуляторы не обеспечивают достаточней точности и помехозащищенности при управлении объектами, подверженными значитеЛьным возмущениям, а также объектаМИ-с запаздыванием и переменными парамё1 райи. -
Йз1вестен также пневматический регулятор переменной структуры, содержащий регулирующее устройство и подключенное к fteky через устройство переключения логическое устройство, в состав которого входит блОк релейной сигнализации .
Однако известный регулятор при управлений объектами с переменными парамётраййи запаздыванйем не обладает достаточной помехозащипденностью, устойчивостью и точностью работы. К тому же регулятор содержит большое число блоков, требу1 бщихнастройки, т. е. он сложен по конструкций;- - - -
Действительно, при значительных по величине значениях производной сигнала ошибки регулирования, не превышающих установленную в сигнализаторах отклонеНИИ зону нечувствительности, выход регулятора остается неизменным, что вызывает большую динамическую ощибку регулирования. При движении регулируемой величины
с большой скоростью к заданному значению закон регулирования не меняется, оставаясь таким же, как и при движении регулируемой величины к заданию с малой скоростью, что приводит к большому нерегулированию или колебанию вокруг заданного значения.
При наличии помех сигнализатор знака производной может выдавать ложную информацию.
Цель изобретения - улучшение динамических характеристик регулятора.
Эта цель достигается тем, что в предлагаемом регуляторе дополнительно установлены два задатчика, двухконтактное реле
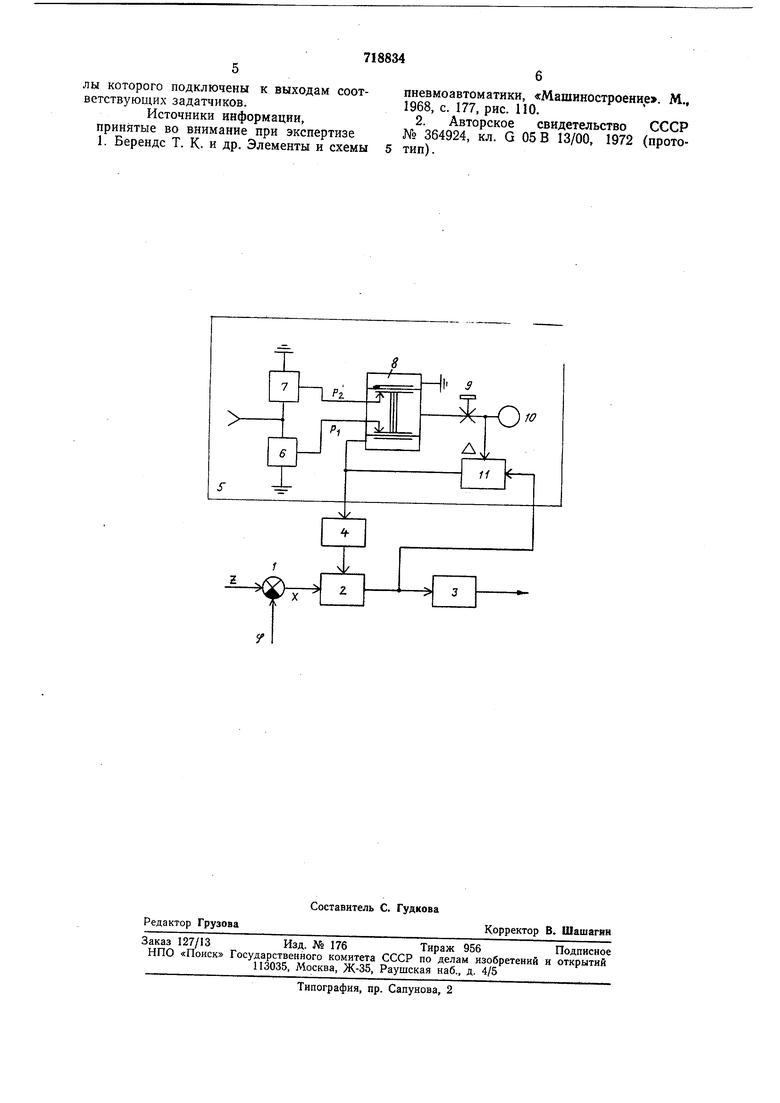
переключения, дроссель, причем первый вход блока сигнализации с зоной нечувствительности подключен к выходу блока предварения, второй вход через дроссель связай с выходом двухконтактного реле йереключенкя, а выход соединен с управляющей камерой двухконтактного реле переключения, входные каналы которого подключены к выходам соответствующих задатчиков. На чертеже приведена принципиальная схема предлагаемого регулятора. Регулятор состоит из элемента 1 сравнения, блока 2 предварения, входы которого через элемент 1 подключены к каналам параметра ф и задания г, регулирующего устройства 3, узла 4 переключения параметров настройки, логического устройства 5, содержащего задатчики 6, 7, двухконтактное реле 8 переключения, дроссель 9, емкость 10 и блок 11 сигнализации с зоной нечувствительности. Работает регулятор следующим образом. На входы элемента 1 сравнения поступают сигнал задания z и текущее значение регулируемого параметра ф, а на его выходе образуется сигнал рассогласования X. На выходе блока 2 предварения формируется сигнал (Х+ТХ, где Г - постоянная времени блока предварения, которая принимает два значения: Т и Т, где . Переключение постоянной времени Т осуществляет узел 4 по команде от блока И сигнализации, который срабатывает при значении выходного сигнала блока предварения, превыщающем зону нечувствительности А. Величина зоны нечувствительности Д устанавливается с помощью элементов 6- 10 и находится в промежутке (Pi, PZ), где . Если текущие значения рассогласования в его производной малы по абсолютной величине, т. е. сигнал на выходе блока 2 предварения находится внутри зоны нечувствительности блока 11, то сигнал на выходе блока 11 равен логическому нулю. Тогда .величина зоны нечувствительности равна или приближается к значению РЬ а в блоке предварения установлена постоянная времени TI. При поступлении возмущения на объект управления регулируемая величина ф начинает удаляться от задания, либо с больщой скоростью приближаться к заданию, значение сигнала (X + Tix) на выходе блока предварения выходит из зоны нечувствительности А, срабатывает блок 11 сигнализации и устанавливает больщую постоянную времени TZ в блоке предварения. Одновременно по команде от блока 11 переключается реле 8 и на вход дросселя 9 поступает давление Рг от задатчика 7, величина зонь нечувстЁйтельности начинает увеличиваться до значения . Поэтому после компенсации возмущения переключение параметра настройки блока предварения происходит с упреждением не в тот момент, когда X+TiX 0, а заранее, в момент, когда (. После компенсации возмущения, когда величина ( + 72) по абсолютной величине становится иленьще величины А, происходит переключение настройки постоянной времени блока предварения на меньшую величину Гь к дросселю 9 через реле 8 подключается задатчик б с меньшей величиной выходного давления Р. Регулятор находится в «ждущем режиме с малыми величинами постоянной Бремени блока предва)рения в зоны нечувствительности блока сигнализации до прихода следующего возмущающего воздействия. По сравнению с известными предлагаемый регулятор позволяет повысить помехозащищенность системы автоматического регулирования (так как при малых значениях X i X ъ блоке предварения выставлена малая постоянная времени), повысить устойчивость системы при наличии запаздывания в объекте (так как структура регулятора изменяется с упреждением не в тот момент, когда ()Q, а. заранее, в момент, когда ()Q, йричем величина А в этот момент большая). Кроме того, он обеспечивает высокую точность работы системы в связи с тем, что форсированные настройки блока предварения устанавливаются в моменты, когда регулируемая ве.личина удаляется от задания или приближается к нему с большой скоростью, а также дает возможность увеличить срок службы исполнительного механизма благодаря тому, что скачков по управлению в моменты переключения структуры блока предварения нет, если, конечно, учитывать практически неизбежную инёрцибнность блока предварения. Конструкция предлагаемого регулятора проста, в нем совмещены блоки логической и регулируемой частей (общий блок предварения). Формула изобретения Пневматический регулятор с переменной структурой, содержащий блок предварения, вход которого связан с каналами параметра и задания, регулирующее устройство, выход которого соединен с выходом регулятора, блок сигнализации с зоной нечувствительности, выход которого подключен к управляющему входу узла перекл1рчений параметров настройки, отличающийся тем, что, с целью улучшения динамических характеристик регулятора, в нем дополнительно установлены два задатчика, двухконтактное реле переключения и дроссель, причем первый вход блока сигнализации с зоной нечувствительности подключен к выходу блока предварения, второй вход через дроссель связан с выходом двухконтактного реле переключения, а выход соединен с управляюшей камерой двухконтактного реле переключения, входные кандлы которого подключены к выходам соответствующих задатчиков. Источники информации, принятые во внимание при экспертизе 1. Берендс Т. К. и др. Элементы и схемы 5 пневмоавтоматики, «Машиностроениеэ. М., 1968, с. 177, рис. ПО. 2. Авторское свидетельство СССР № 364924, кл. G 05В 13/00, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Пневматический регулятор | 1985 |
|
SU1262449A1 |
| Регулятор с релейной характеристикой | 1987 |
|
SU1418648A2 |
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
