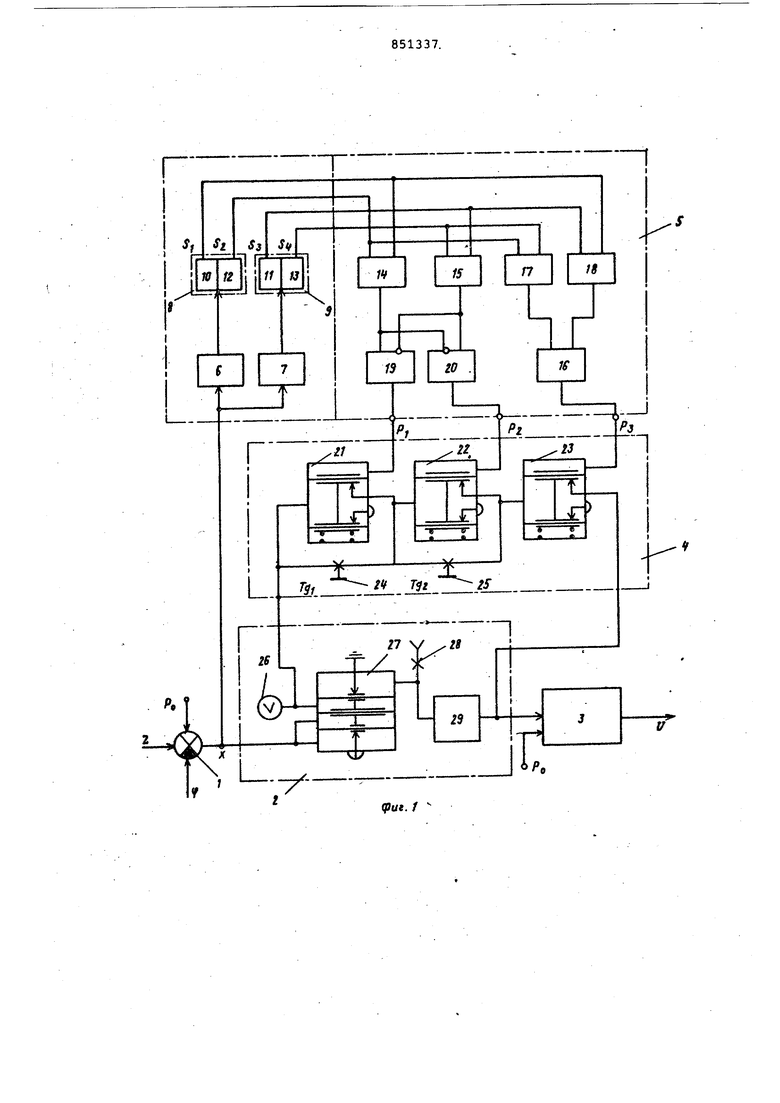
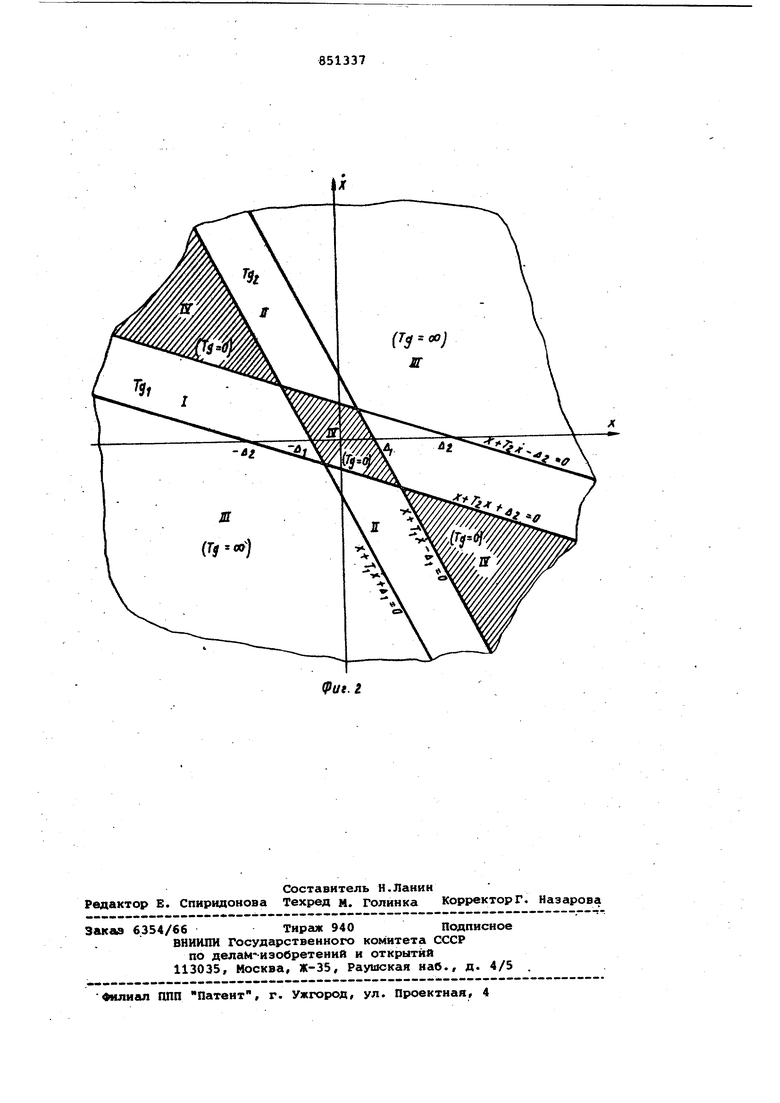
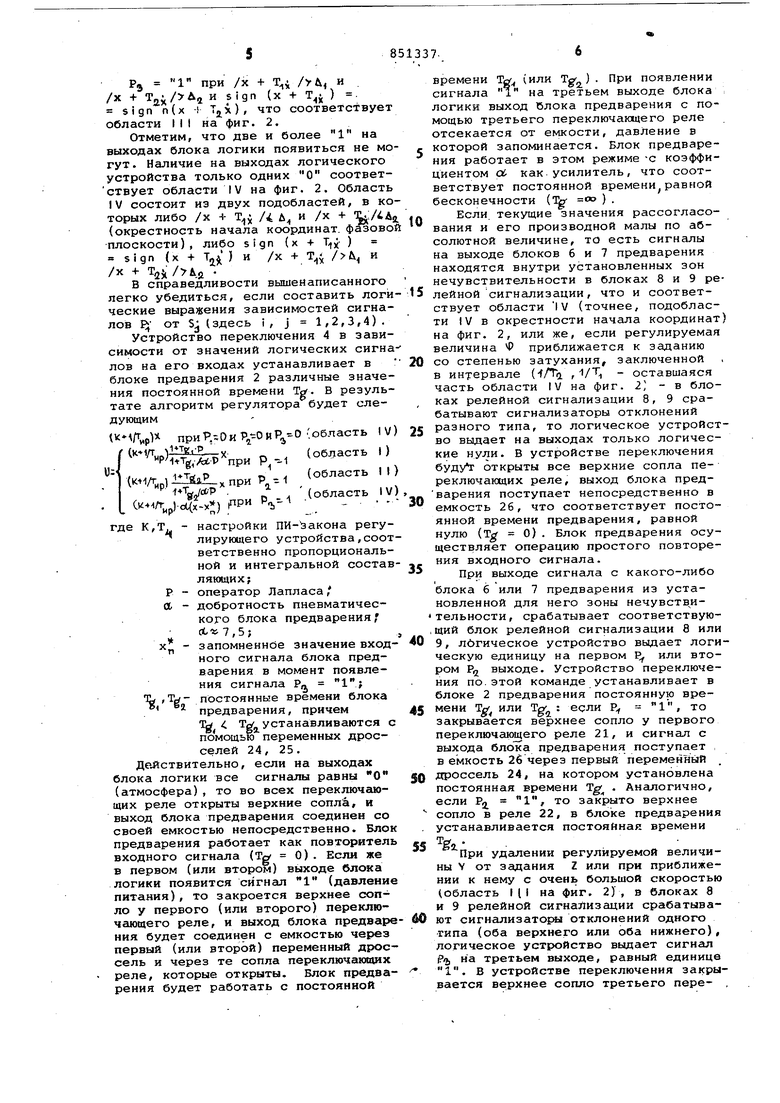
Изобретение относится к технике автоматического управления и предназначено для регулирования технологических параметров в химической,нефтехимической и других отраслях народного хозяйства. Известен пневматический регулятор переменной структуры, содержгидий регулирующее устройство и подключенное к нему через устройство переключения логическое устройство, в состав которого входят блоки релейной сигнализации: сигнализатор знака производной, сигнализаторы верхнего и нижнего отклонения fl. Однако известный регулятор при управлении объектами с переменными параметрами и запаздыванием не обладает достаточной помехозащищенностью, устойчивостью и точностью. СИГНсШИЗЙтор знака производной при наличии помех может выдавать ложную информацию При значительных по величине зТ1ачениях производной сигнала ошибки и при значениях сигнала ошибки регулирования, не превышающих установленную в сигнализаторах отклонений зону нечувствительности, выход регулятора не изменяется, что приводит к большой динамической ошибке регулирования. При движении регулируемой величины с большой скоростью к заданному значению закон регулирования остается таким же, как и при движении регулируемой величины к заданию с малой скоростью, что приводит к БОЛЬШОМУ перерегулированию или колебаниям .вокруг заданного значения. Наиболее близкий к предлагаемому пневматический регулятор с переменной структурой, содержащий последовательно соединенные элемент сравнения, блок предварения и регулир нжцее устройство и подключенное к блоку предварения через устройство переключения логическое устройство, в состав которого входят блок релейной сигнализации, переключающее реле и дроссель С23.f В логическое устройство Moryii входить также элементы ИЛИ, И, ЗАПРЕТ. Недоста ком такого регулятора являются сложность устройства переключения, большое количество переключаек/их коэффициентов и кроме того, при переключениях структуры регулятора .в течение переходного процесса происходит несколько скачков по управлению, которые могут быть значительными при переключении пропорциональной составляющей. Цель изобретения - повышение поме хозащищенности, устойчивости и точ«ости регулятора. Указанная цель достигается тем, что в пневматическом регуляторе с п.е ременной структурой, содержащем последовательно соединенные элемент сра нения, блок предварения с дифферен|цирук1цей емкостью, регулирукяцее устройство, устройство переключения и блок логики, состоящий из двух до:полнительных блоков предварения,входы которых соединены с выходом элемента сравнения, входы которого подк 1ючены к входным каналам регулятора , выходы дополнительных блоков предварения соединены с соответствую иими входами двух блоков релейной сигнализации, выходы которых соедине ны с входами первого и второго элементов ИЛИ, выходы первого и второго элементов ИЛИ подключены соответственно к входам первого и второго эле ментов ЗАПРЕТ и запрещающим входам второго и первого элементов ЗАПРЕТ, выходы которых соединены с первым и вторым выходами блока логики, к третьему выходу которого подключен выход третьего элемента ИЛИ, входы которого соединены с выходаиии перво и второго элементов И, входы которых подключены к соответствукнцим выходам блоков релейной сигнализации, устройство переключения состоит из двух переменных дросселей и трех последо вательно соединенных переключающих реле, причем выход первого переключающего реле подключен к дифференцирующей емкости блока предварения через первый переменный дроссель к выходу второго переключающего реле, а через второй переменный дроссельк выходу третьего переключающего ре ле, вход которого соединен с выходо блока предварения, а управляющие ка меры переключающих реле соединены с соответствующими выходами блока логики . На фиг. 1 приведена принципиальная схема предлагаемого регулятора; на фиг. 2 - разбивка фазовой плоско ти логическим устройством на области. Регулятор состоит из элемента 1 сравнения, блока 2 предварения, рег лирующего устройства 3 для реализации стандартного ПИ-закона, устройства 4 переключения {параметров нас ройки блока предварения) и блока 5 логики. В состав блока 5 логики вхо дят два дополнительных блока б и 7 предварения, два блока 8 и 9 релейной сигнализации, каждый из которых состоит из сигнализаторов-10 и 11 нижнего, и сигнализаторов 12 и 13 верхнего отклонений выходных сигнал дополнительных блоков предварения за нижние и, соответственно, верхние границы зон нечувствительности, и логи еские элементы: три элемента ИЛИ 14, 15, 16, два элемента И 17 и 18 и два элемента ЗАПРЕТ 19 и 20.Устройство 4 переключения состоит из трех переключающих реле 21, 22, 23 и двух переменных дросселей 24 и 25. Блок 2 предварения содержит дифференцирующую емкость 26, трехмембранный элемент 27 сравнения, постоянный дроссель 28 и усилитель 29 мощности. Регулятор работает следующим образом. На выходы элемента 1 сравнения поступают сигнал Z задания и текущее значение Y регулируемого параметра, а на выходе образуется аналоговый сигнал X рассогласования, равный Е„ + Z -V Сигнал Рд необходим для установки условного пневматического нуля (обычно PQ 0,6 кгс/см), на элементе 1 сравнения сигнал Рд складывается с сигналом Z задания, в регулируюцем устройстве 3 сигнал Р вычитается из выходного сигнала блока 2 предварения. На выходе дополнительного блока 6 предварения формируется сигнал (х + ) на выходе блока 7 предварения - сигнал (х + Tji) , релейные сигнализаторы 10-13 формируют следующие логические сигналы сигнсшизатор 10 Ь -Г1 О при сигнализатор 11 с J-1 при при сигнализатор 12 с .Г1 при при сигнализатор 13 где Л;, Л и Л и &1 - значения настраиваемых зон нечувствительности блоков релейной сигнализации 8 и 9} Т И TIJ, - постоянные времени блоков предварения 6 и 7«, X - сигнал рассогласования, X - производная по времени сигнала рассогласования. Логические сигналы с сигнализаторов 10-13 поступают на входы элементов 14, 15, 17, 18 и вызывают появление на выходах блока логики 5 сигналов ,со- отвётствукзщих 1 при следующих условиях:p i nprt|x T,ilib.,w |x T2JtU&.a, что соответствует области I на фиг.2; Р, 1 при /X н- /X + Т.л А ц , что соответствует об ласти П на фиг. 2, РЗ 1 при /X + /У Л, и /X + T, и sign (х + ) . sign n(x -1 ), что соответствует области III на фиг. 2. Отметим, что две и более 1 на выходах блока логики появиться не мо гут. Наличие на выходах логического устройства только одних О соответствует области IV на фиг. 2. Область IV состоит из двух подобластей, в ко торых либо /X + / Л и /X + (окрестность начала координат, фазово плоскости), либо sign {х + 1) ) sign (х + ) и /X + Т и /X + ,а В справедливости вышемаписанного легко убедиться, если составить логй ческие выражения зависимостей сигналов от Sj (здесь i, j 1,2,3,4). Устройство переключения 4 в зависимости от значений логических сигна лов на его входах устанавливает в блоке предварения 2 различные значения постоянной времени Tg. В результате алгоритм регулятора будет следующим приP.xOHP,j-OHP, .область IV ( (область II (Пс)хПриР,-1 (область IV „„„ Р„.-1 . ,p)) , Ь где К,Т - настройки ПИ-закона регулирующего устройства,соот ветственно пропорциональной и интегральной состав ляющих; Р - оператор Лапласа , а - добротность пневматического блока предварения, Л 7, 5; X - запомненное значение входного сигнала блока предварения в момент появления сигнала Р постоянные времени блока предварения, причем TW 4. Tg устанавливаются с помощью переменных дросселей 24, 25. Действительно, если иа выходах блока логики все сигналы равны О (атмосфера) , то во всех переключгиощих реле открыты верхние сопла, и выход блока предварения соединен со своей емкостью непосредственно. Блок предварения работает как повторитель входного сигнсша (Т 0). Если же в первом (или втором) выходе блока логики появится сигнал 1 (давление питания), то закроется верхнее сопло у первого (или второго) переключающего реле, и выход блока предваре ния будет соединен с емкостью через первый (или второй) переменный дроссель и через те сопла переключающих реле, которые открыты. Блок предварения будет работать с постоянной Tg (или Tg- ) . При появлении времени 1 на третьем выходе блока сигнала 1 на третьем логики выход блока предварения с помощью третьего переключак1дего реле отсекается от емкости, давление в которой запоминается. Блок предварения работает в этом режиме -с коэффициентом ct как усилитель, что соответствует постоянной времени равной бесконечности (IW ) Если текущие значения рассогласования и его производной малы по абсолютной величине, то есть сигналы на выходе блоков 6 и 7 предварения находятся внутри установленных зон нечувствительности в блоках 8 и 9 релейной сигнализации , что и соответствует области IV (точнее, подобласти IV в окрестности начала координат) на фиг. 2, или же, если регулируемая величина приближается к заданию со степенью затухания, заключенной в интервале (-f/Tii -l/T, - оставшаяся часть области IV на фиг. 2) - в блоках релейной сигнализации 8, 9 срабатывают сигнализаторы отклонений разного типа, то логическое устройство выдает на выходах только логические нули. В устройстве переключения открыты все верхние сопла переключающих реле, выход блока предварения поступает непосредственно в емкость 26, что соответствует постоянной времени предварения, равной нулю (Т 0). Блок предварения осуществляет операцию простого повторения входного сигнала. При выходе сигнала с какого-либо блока б или 7 предварения из установленной для него зоны нечувств ительности, срабатывает соответствующий блок релейной сигнализации 8 или 9, лбгическое устройство выдает логическую единицу на первом Р или втором . выходе. Устройство переключения по.этой команде устанавливает в блоке 2 предварения постоянную времени ИЛИ Tg;, : если Р 1, то закрывается верхнее сопло у первого переключсшицего реле 21, и сигнал с выхода блока предварения поступает в емкость 26 через первый переменный дроссель 24, на котором установлена постоянная времени Tg . Аналогично, если Pj 1, то закрыто верхнее сопло в реле 22, в блоке предварения устанавливается постоянная времени При удалении регулируемой величины V от задания Z или при приближении к нему с очень большой скоростью (область MI на фиг. 2), в блоках 8 и 9 релейной сигнализации срабатывают сигнализатоЕЯЛ отклонений одного гипа (оба верхнего или оба нижнего), логическое устройство выдает сигнал РО, на третьем выходе, равный единице 1. В устройстве переключения закрывается верхнее сопло третьего пере- , ключакмцего реле, выход блока предварения отсекается от емкости, что ана логично установке постоянной времени равной бесконечности (Tg сю ). в этом режиме блок предварения начинае работать как усилитель с коэффициентом СХ- , где ot - коэффициент усиления схемы элемента 27 сравнения совместно с постоянным дросселем 28. То ест С помощью блока 2 предварения устанавливается формированная настройка закона регулирования. По сравнению с известными предлагаемый регулятор позволяет .повысить помехозащищенность системы автоматического регулирования (при малых зна чениях X и X постоянная времени пред варения Tgf - О) , повысить устойчивость системы при наличии запаздывания в объекте (структура регулятора изменяется с упреждением не в тот когда /X + T,jjj / О, а зарамомент, нее, в момент, когда /х + 2 где Т, 7 Т } ; повысить точность рабо ты системы (форсированные настройки закона регулирования устанавливаются в моменты, когда регулируемая величи на удаляется от задания или приближа 1ется к нему с большой скоростью);повысить срок службы исполнительного механизма, так как скачок по управлению происходит только в тот момент переключения структуры блока предварения, когда постоянная времени становится равной нулю (при Ъбратном переходе скачка не наблюдается),если учитывать практически неизбежную инерционность блока предварения, характеризуемую добротностью х . Чем больше сб ; тем меньше инерционность и наоборот. В таком блоке предварения скачков выходного сигнала не про исходит также при переключении отлич ных от нуля постоянных времени;уменьшить количество переключаемых параметров, упростить конструкцию устройства переключения, так как переключаются всего два -параметра значения постоянных времени предваре ния Т и Tgjj , значения постоянных времени Т О и Tg 00 получаются без применения дополнительных переменных дросселей. . ... Формула изобретенйя Пневматический регулятор с переменной структурой; содержащий послеовательно соединенные элемент сравнения/ блок предварения с дифференцирующей емкостью, регулирующее устройство, устройство переключения и блок логики, состоящий из двух дополнительных блоков предварения,входы которых соединены с выходом элемента сравнения, входы которого подключены к входным кансшам регулятора, выходы дополнительных блоков предварения соединены с соответствующими входами двух блоков релейной сигнализации, выходы котррых соединены с входами первого и второго элементов ИЛИ, выходы первого к второго элементов ИЛИ подключены соответственно к входа первого и второго элементов ЗАПРЕТ и запрещающим входам второго и первого элементов ЗАПРЕТ, выходы которых соединены с первым и вторым выходами блока логики, к третьему выходу которого подключен выход третьего элемента ИЛИ, выходы которого соединены с выходгьми первого и второго элементов И, входы которых подключены к соответствующим выходам блоков релейной сигнализации, отличающийся тем, что,с целью повышения помехозащищенности, устойчивости и точности регулятора, в нем устройство переключения состоит из двух переменных дросселей и трех последовательно соединенных переключающих реле, причем выход первого переключающего реле подключен к дифференцирующей емкости блока предварения и через первый переменный дроссель к выходу второго переключающего реле, а через второй переменный дроссель - к выходу третьего переключающего реле, вход которого соединен с выходом блока предварения, а управляющие камеры переключающих реле соединены с соответствующими выходами блока логики. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 364924, КЛ. 6 05 В 13/00, 1971. 2. Авторское свидетельство СССР по заявке 2605168/18-24, КЛ. G 05 В 13/00, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1973 |
|
SU363071A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU622046A1 |
| Пневматическое устройство прямого предварения | 1981 |
|
SU970389A1 |
| Пневматический регулятор с переменной структурой | 1986 |
|
SU1401438A1 |
| ПНЕВМАТИЧЕСКАЯ УПРАВЛЯЮЩАЯ МАШИНА ДЛЯ АВТОМАТИЗАЦИИ ПРОИЗВОДСТВА ПОЛИЭТИЛЕНА | 1964 |
|
SU165602A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |