Изобретение относится к технике автоматического управления и предназначено для регулирования технологических параметров в химической, металлургической, нефтегазовой, пищевой и других отраслях народного хозяйства. Известен пневматический регулятор переменной структуры, содержащий регулирующее устройство и подключенное к нему через устройство переключения логическое устройство, состав ной частью которого являются блоки релейной сигнализации (сигнализатор знака производной, сигнализаторы верхнего и нижнего отклонений) ij . Однако известный регулятор при управлении объектами с переменными параметрами и запаздыванием не об.падает достаточной помехозащищенностью устойчивостью и точностью работы. Известен также регулятор с переменной структурой, содержащий регулирующий блок , блоки переключения, логический блок, элемент сравнения, блоки релейной сигнализации, два из которых определяют знаки выходных сигналов первого и второго блоков предварения (входящих в состав этих же блоков релейной сигнализации) Однако этот регулятор является довольно сложным по конструкции,требует большого количества блоков релейной сигнализации, в состав которых входит такое же количество блоков предварения или дифференцирования, блоков определения абсолютных значений сигналов ошибки и ее производной. Целью изобретения является повышение помехозащищенности, устойчивости и точности регулятора. Эта цель достигнута благодаря тому, что в предлагаемом регуляторе первый и второй блоки релейной сигнализаций содержат сигнализаторы верхнего и нижнего отклонений, выходы которых поступают на входы логического блока, содержащего первый и второй элементы ИЛИ, входы которых соединены соответственно с выходами первого и второго блоков релейной сигнализации, элемент ИЛИ-НЕ, первый и второй входы которого подключены соответственно к выходам первого и второго элементов ИЛИ, а выход соединен с первым входом блока переключения, первый элемент Запрет, на ВХОД которого подается сигнал с выхода первого элемента ИЛИ, на запрещающий вход - с выхода второго элемента ИЛИ, а выход соединен со вторым входом блока перё-ключения, второй элемент Запрет, на вход котоjjorb подаётся сигнал с выхода второГсз §лёмёнта ИЛИ, на запрещакяций
вход - с выхода первого элемента ИЛИ а выход соединён с третьим входом блока переключения, первый элемент И, вхЪдУ; которого соединены с выходами сигнализаторов верхнего отклоне- . Т}йя, элёмёнт И, вхбды кОтЪрого соединены с выходами сигнализаторов нижнего отклонения, и третий элемент ИЛИ, первый и второй входы которого подключены соответственно к выходам первого и второго элементов .И, а выход соединен с четвёртым входом блока переключения.
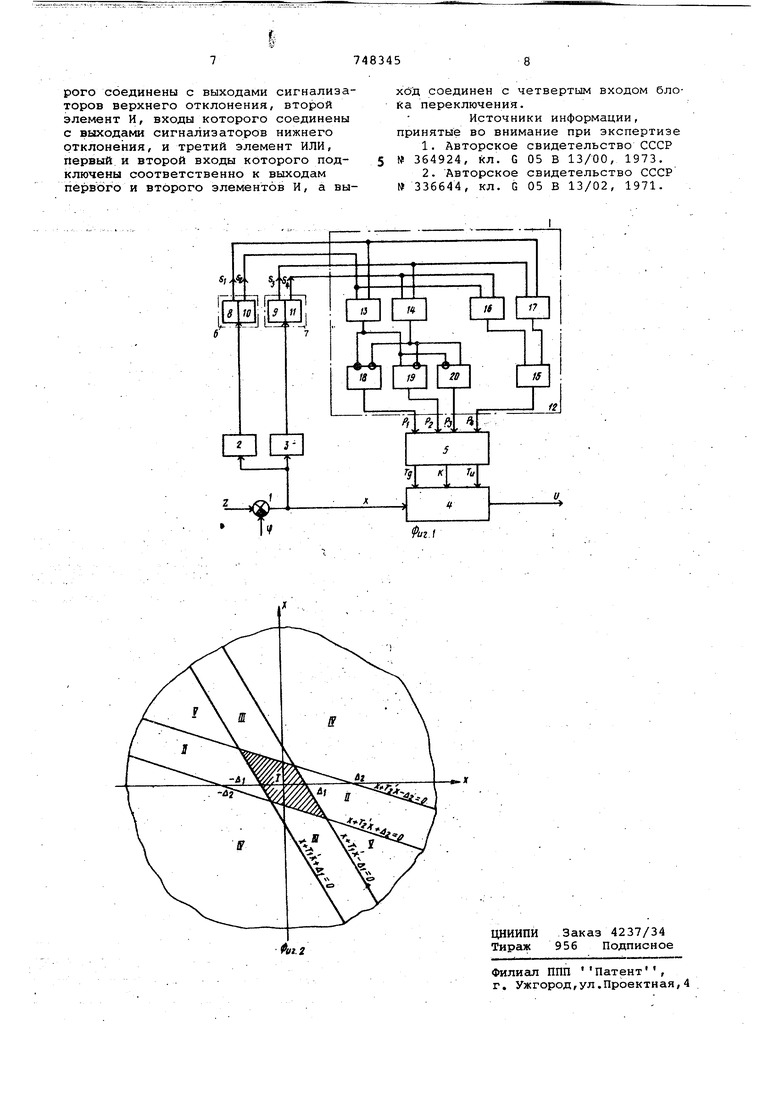
На фиг. 1 приведена принципиальная схема предлагаемого регулятора; на фиг. 2 - разбиение фазовой плос, кости логическим устройством на области. .
Регулятор состоит, из элемент а сравнения 1, двух блоков предварения
.сигнализатор 8 сигнализатор 9
- -х- л .- / ч
сигнализатор 10 сигнализатор 11
где , ; Т .; ь. и U а значения зон нечувствительности блоков релейной сигнализации б, 1, ..
иТ, постоянные времени блоко
Ч предварения 2 и З; -г. ,. . - сигнал рассогласования; Я - производная по времени ;сигнала рассогласования.
Логические сигна лы с сйгналйзаторОв 8, 9, 10, 11 поступают на входы логического блока 12 тл вызывают по явлениё йа вйходах логического устройства сигналов, соответствуквдих логической единице 1 п рйслёдуйщих условиях: . : . - ,
. РЛ 1 при (X + T,jj ) (v + + ( ) t д , что соответствует облас2,на фиг
ти
-7. , 1 при (х + )Л и (х + Р„
+ TJ.X. )4Aj, ЧТО соответствует области fI на фиг. 2;
при (х + Т;,х )Д4И (х +
t, 1 + ) Д , что соответствует об на фиг. .2; . .-
ласти 1II
О
Ч+ ,Р )Х. (Т,Р + Л ))k (г„ р +к )-VTH2P ) 1 кхпрнР,, О, Р О
2, 3, регулирующего блока 4 для реализации стандартного ПИД-закона, блока 5 переключения (параметров настройки или закона регулирования), двух блоков релейной сигнализации 6, 7, содержащих сигнализаторы 8, 9 нижнего и сигнализаторы 10, 11 верхнего отклонений выходных сигналов блоков предварения за нижние и соответственно верхние границы зон нечувствительности,логического блока 12,содержащего элементы ИЛИ 13,14,15, элементы И 16, 17, элемент ИЛИ-НЕ 18 и элементы Запрет 19, 20.
Регулятор работает следующим образом.. ,
На входы элемента сравнения 1 по. ступают сигнал задания z и текущее значение регулируемого параметра f , а на его выходе образуется сигнал рассогласования X .
ч
На выходе блока предварения 2 формируется сигнал ( ; + ) , на выходе блока предварения 3 - сигнал ( 1 релейные сигнализаторы 8,9,10, 11 , формируют следующие логические сигналы;
) (X +
+ tjjc )Дт. и (х + Т;,х ) si9rn (л + + т,Я ), что соответствует области 40 IV на фиг. 2.
Отметим, что две и более логрческиё единицы 1 на выходах логического устройства появиться не могут. .Наличие на выходах логического устройства только одних логических нулей cooTeeVcTByeT области V н Фиг. 2
Справедливость вьоиесказан.ного легко проверить, если состйвить логи-г ческие выражения зависимостей сирналов Р-, от S|, Блок 5 переключения параметров закона регулирования в зависимости от значений логических сигналов:на его входах устанавливает в регулирующем блоке 4 различные значения параметров настройки каждой составляющей ПИД-закона регулирова/йия. Наиболее эффективен.следующий
алгоритм работы регулятора
приР, 1 (область I).. при Р 1 (область II), прир„ 1 (область III), прирд 1 (область IV), Pj О, Р О (область V)
где , ,0 - умеренные настройки ПИД-закона регулирования, соответственно пропорциональной, ,интегральной и дифференциальной составляющих; 7f ua/%2 - форсированные настройки ПИД-эакона регулирования;Р - оператор Лапласа,
, ,
;
в скобках указаны номера областей на фиг, 2,
Если текущие значения рассогласования и его производной малы по абсолютной величине, То есть сигналы на выходе блоков предварения 2,3 находятся внутри установленных зон нечувствительности в блоках релейной сигнализации 6,7, что соответствует области I на фиг. 2, то на первом выходе Р, логического блока 12 сигнал равен логической 1, который поступает на первый вход блока переключения 5, отключающего врегулирующем блоке 4 все составляющие закона регулирования, в результате чего управляющее воздействие на выходе регулятора не меняется (приращение его равно нулю).
Аналогично, если сигнал на выходе какого-либо блока предварения 2 или 3 выйдет из установленной для него зоны нечувствительности, срабатывает соответствующий блок релейной сигнализации 6 или 7, логический блок выдает сигнал на втором Р, или третьем Р выходе, блок переключения параметров 5 по команде от логического блока 12 установит в регулирующем блоке 4 соответствующий закон регулирования: если Р, 1, то отключена только дифференциальная составляющая закона, если Р 1, то отключается интегральная составляющая .
Если регулируемая величина УДаляётся от задания z или приближается к нему с очень большой скоростью (область IV на фиг. 2), в блоках релейной сигнализации 6, 7 срабатыбают сигнализаторы, отклонений одйого типа (оба верхнего или оба нижнего), логический блок выдает сигнал Р, на четвертом выходе, равный 1, а блок переключения 5 по этому сигналу устанавливает форсированные настройки ПИД-закона регулирования.
Если регулируемая величина f приближается к заданию со степенью затухания, заклйченной в интервале (1/т, 1/т), в блоках релейной сигнализации 6, 7 срабатывают сигнализаторы отклонений разного типа (область V на фиг. 2), то логическое устройство выдает на выходах только
ia g :ygpSf -iFy ;- rs- -i
логические нули/ а устройство переключения оставит в законе регулирования только пропорциональную составляющую (чтобы не было больших скачков по управлению при выходе в эту 5 область из смежных областей 11,111). По сравнению с известными предлагаемый регулятор позволяет повысить помехозащищенность системы автоматического регулирования (так как при
Q малых значениях х и ; и о) ; повысить УСТОЙЧИВОСТЬ системы при наличии запаздывания в объекте (так как структура регулятора изменяется с упреждением не в тот момент, когда
. ) О, а заранее, в момент,когда ( к ) I повысить точность работы системы (так как форсированные параметры, настроек закона регулирования устанавливаются в моменты, когда регулируемая величина удаляется от задания или приближается к нему с большой скоростью); повысить срок службы исполнительного механизма (так как скачки по управлению в моменты переключения структуры регу5 лятора незначительны).
Формула изобретения
Пневматический регулятор с перемениой структурой, содержащий эле-. :мент сравнения, связанный с ним регулирующий блок и подключенный к не:Му блок переключения , логический
блок, первый и второй блоки релейной сигнализации, входы которых подключены соответственно к выходам первого и второго блоков предварения,входы которых соединены с выходом элемента сравнения, отличающий с я тем, что, с целью повьшения помехозащищенности, устойчивости и точности регулятора, в нем блоки релейной сигнализации содержат сигнализаторы BiepxHero и нижнего отклонений, а логический блок содержит первый и второй элементы ИЛИ, входы которых соединены соответственно с выходами первого и второго блоков релейной сигнализации, элемент ИЛЙ-НЕ,
первый и второй входы которого подключёны соответственно к выходам первого и второго элементов ИЛИ, а выход соединён с первым входом блока переключения, первый элемент
Запрет, вход которого соединен с выходом первого элемента ИЛИ, запрещающий вход - с выходом второго элеента ИЛИ, а выход соединен со вторым входом блока переключения, второй элемент Запрет, вход которого соединен с выходом второго элемента ЛИ, запрещакяций. вход - с выходом первого элемента ИЛИ, а выход соединен с третьим входом блока переклю- ,
ения, первый элемент И, входы которого соединены с выходами сигнализаторов верхнего отклонения, второй элемент И, входы которого соединены с выходами сигнализаторов нижнего отклонения, и третий элемент ИЛИ, первый и второй входы которого подключены соответственно к выходам первого и второго элементов И, а выхбд соединен с четвертым входом блока переключения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 364924, кл. G 05 В 13/00, 1973.
2.Авторское свидетельство СССР №336644, кл. G 05 В 13/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| Регулятор напряжения для силовых трансформаторов | 1982 |
|
SU1140094A1 |
| Система автоматического управления процессом получения сернистого газа в производстве серной кислоты | 1989 |
|
SU1641770A1 |
| Многоканальный импульсный регулятор | 1974 |
|
SU565283A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2003 |
|
RU2242039C2 |
| Пневматический двухпозиционный регулятор | 1983 |
|
SU1128222A1 |
