Изобретение относится к области автоматического управления с исполь зованием цифровых вычислительных уст ройств. Цифровая следящая система предназначена для дистанционного сле жения за углом поворота объекта вокруг его оси. Известны цифровые следящие системы, содержащие преобразователи углов поворота задающей и принимающей осей (валов) в код (преобразователи уго код ), дискретное сравнивакщее устройство, преобразователь кода угла рассогласования в аналоговые сигналы, усилитель и привод-двигатель с нагрузкой 1. Недостаток таких следящих системповышенное время отработки заданного угла рассогласования при различных скоростях задающей оси, т.е. низкое быстродействие. Известна цифровая следящая система комбинированного регулирования, содержащая последовательно соединенные преобразовательно-усилительное устройство, исполнительный двигатель преобразователь угол-код принима ющей оси и дискретное сравнивающее устройство, второй вход которого подключен к преобразователю уголкод задающей оси, а прямые и инверсные выходы к соответствующим входам преобразователя кода, а также цифровой дифференциатор 2. Однако в этой цифровой следящей системе время отработки заданного рассогласования задающей и принимающей осей не достигает минимально возможного значения, если скорость вращения за относительно малое время достигает максимального, (ограниченного) значения, т.е. быстродействие не достигает наиболее высокого значения. Действительно, в начальный момент времени, после задания угла рассогласования задающей и принимающей осей, значение угла произвольно в пределах 0°до ЗбО. Скорость вращения ограничена максимальным значением п. Рассогласование устраняется разгоном, реверсированием или торможением приводом приндалакяцей оси в зависимости от значений угла рассогласования, в направлении, по которому угол обработKjr минимален и не превышает 180. Если скорость вращения задающей оси п, скорость вращения принимающей .оси
n, то максимальное время отработки угла рассогласования в режиме разгона
Т i
113 неравенства следует, что максималь ное время отработки неограниченно возрастает при приближении скорости задающей оси П|. к максимальной скорост принимающей оси пд. При заданной скорости вращения n время отработки может быть уменьшено засчет увеличения максимальной скорости, вращения принимающей оси п. Это требует установки двигателя и передаточного механизма, допускающих повышенную скорость вращения. Вес, габариты и стоимость системы возрастают. Для нереверсивной следящей системы при отработке рассогласования в режиме торможения максимальное время отработки
l&O
Т м
При уменьшении скорости задания п время отработки неограниченно возрастает, что может оказаться препятствием для использования более простой нереверсивной системы. В этом случае время отработки не может быть уменьшено за счет подбора : двигателя с большей скоростью вращения.
Цель изобретения .- повышение быстродействия, а именно - уменьшение времени отработки заданного угла рассогласования без увеличения максимальной скорости вращения принимающей оси
Для достижения этой цели в цифровую следящую систему введено логическое переключающее устройство, сигнальные входы -которого подключены к выходам преобразователя кода, управляющие входы соединены с выходами цифрового дифференциатора, а вход подключен ко входу преобразовательно-усилительного устройства.
Кроме этого, в такой цифровой следящей системе с двумя ступенями скорости вращения преобразователь .кода может содержать три элемента
И-НЕ
входы первого элемента
И-НЕ подключены к инверсным входам разрядов преобразователя кода, кроме старшего разряда, выход первого зле мента И-НЕ подключен к входам второго и третьего элементов, вторые входы которых подключены к инверсному входу старшего разряда преобразователя кода, третий вход третьего эяемен та И-НЕ соединен с инверсным входом разряда предшествующего старшему, пре образователя кода, вьОйэды второго и третьего элементов .подключены к выходампреобразователя кода.
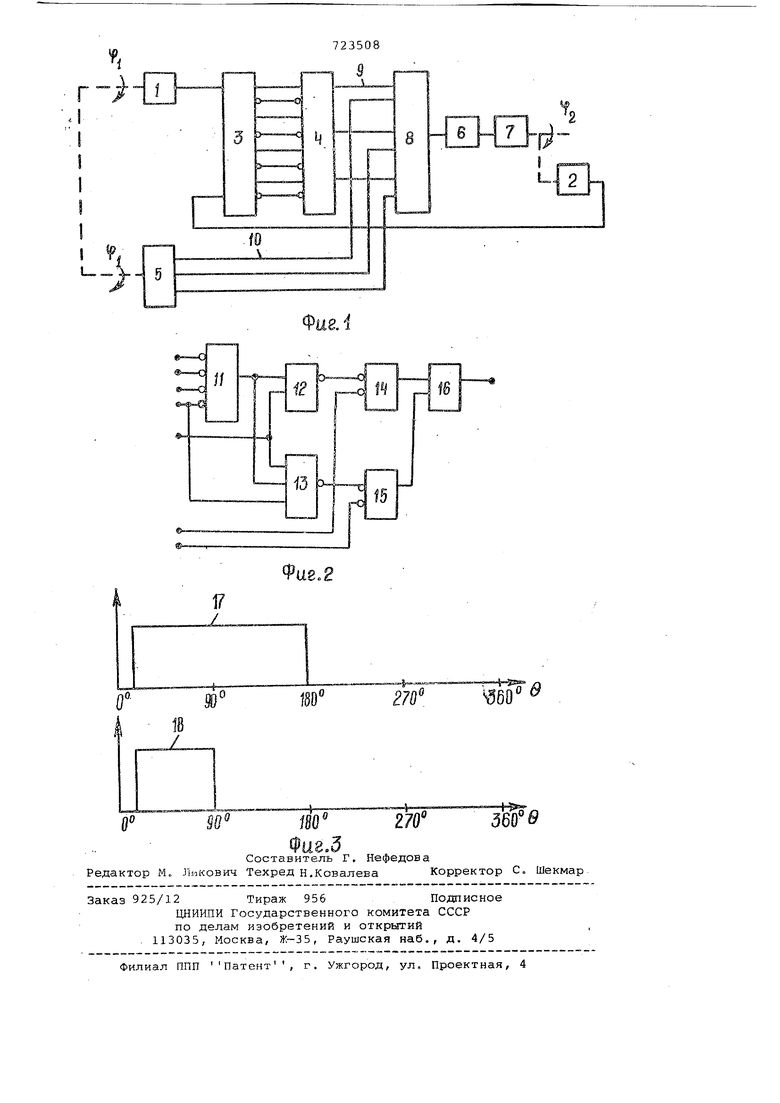
На.фиг. 1 представлена схема цифро во{ ледяп1ей системы; на фиг. 2 схема преобразователя кода угла рассогласования в управляющие сигналы и логического переключающего устройства на фиг.. 3 - диаграммы, отражающие зависимости сигнала рассогласования от угла рассогласования.
Цифровая следящая система содержит преобразователи угол-код углов поворота задающей и принимающей осей Ч и , соответственно, в коды 1 и 2, дискретное сравнивающее устройство 3, преобразователь 4 кода, цифровой дифференциатор 5, преобразовательно-усилительное устройство 6, исполнительный двигатель 7 и ло. гическое переключакхдее устройство 8.
Система работает следующим образом.
Сигналы преобразователей 1 и 2 поступают на дискретное сравнивающее устройство 3, вырабатывающее код угла рассогласования, который передается на преобразователь 4 кода. Преобразователь 4 кода вырабатывает управляющие сигналы, соответствукщие возможным дискретным значениям скорости вращения задающей оси. Сигналы преобразователя 4 поступают на переключаемые входы 9 логического переключающего устройства 8, на управляющие входы 10 которого поступают сигналы с выходов цифрового дифференциатора 5, В зависимости от скорости вращения задающей оси логическое переклкзчакхцее устройство 8 передает один из сигналов преобразователя 4 кода, соответствующий текущей скорости вращения задающей оси. Сигнал с выхода переключающего устройства В передается на вход преобразовательно-усилительного устройства б, выходное напряжение которого регулирует скорость вращения двигателя 7. Двигатель отрабатывает угол рассогласования „
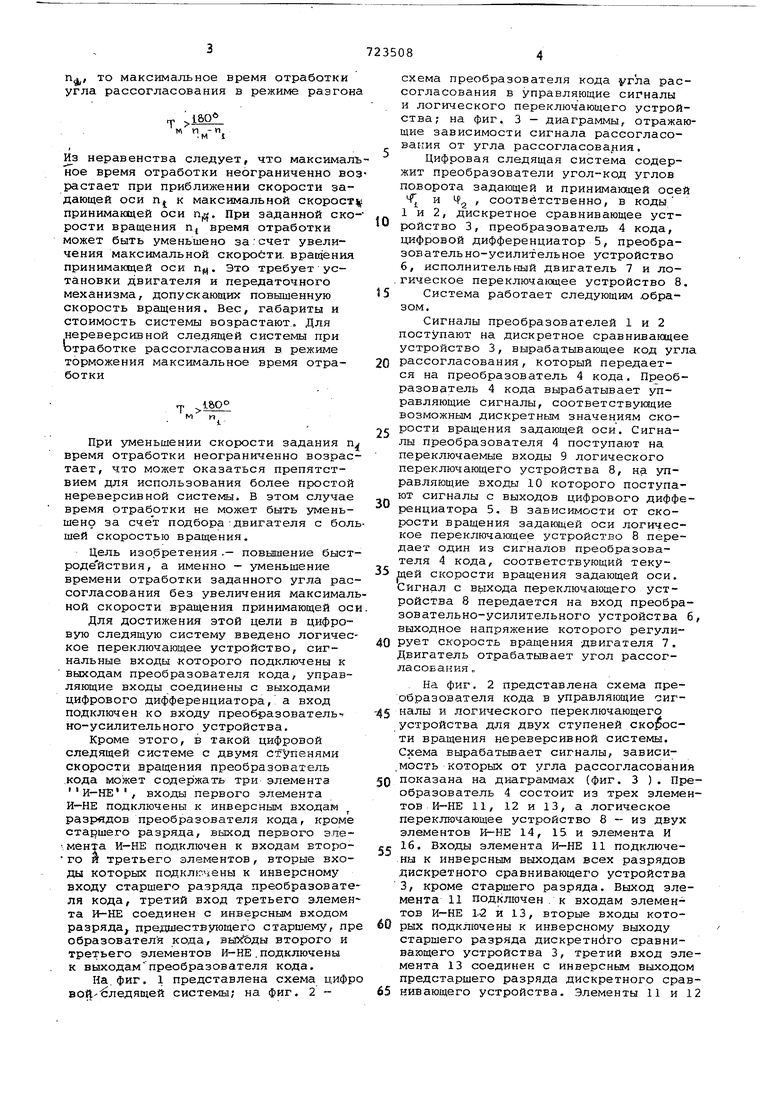
. На фиг. 2 представлена схема преобразователя кода в управляющие сигналы и логического переключающего устройства для двух ступеней скорости вращения нереверсивной системы. Схема вырабатывает сигналы, зависи,мость которых от угла рассогласования
0 показана на диаграммах (фиг. 3 ). Преобразователь 4 состоит из трех элементов И-НЕ 11, 12 и 13, а логическое переключающее устройство 8 - из двух элементов И-НЕ 14, 15 и элемента И 16. Входы элемента И-НЕ 11 подключены к инверсным выходам всех разрядов дискретного сравнивающего устройства 3, кроме старшего разряда. Выход элемента 11 подключен . к входам элементов и-НЕ 12 и 13, вторые входы которых подключены к инверсному выходу старшего разряда дискретнбго сравнивающего устройства 3, третий вход элемента 13 соединен с инверсным выходом предстаршего разряда дискретного срав5 кивающего устройства. Элементы 11 и 12 Вырабатывают инверсный управляющий сигнал для первой ступени скорости . вращения, а элементы 11 и 13 - для второй ступени. Если прямой код угла рассогласования во всех разряда О , т.е, инвер принимает значение нее значение , то на входах эле . а на ныхол мента 11 - сигналы , а на выход О, на выходах элементов 12 и 13 сигналы - . Это соответствует нулевому рассогласованию. Если же код угла рассогласования хотя бы в одном разряде принимает значение (кроме старшего разряда), то на выхо де элемента 11 - сигнал . В это случае элемент 12 инвертирует сигнал старшего разряда кода. Так как старший разряд кода изменяет свое значение при углерассогласования 180®, то при угле рассогласования в пределах от О до 18 О® на выходе „элемента 12 - сигнал 0 а при угле рассог ласования в пределах 180-ЗбО - сигн . Так как при угле рассогласо-. вания в пределах 90-- 180® инверсное значение предстаршего разряда кода равно О, то элемент 13 вырабатывает сигнал О при угле рассогласования в пределах от О до 90°, а пр угле в пределах от 90 до 360 - сиг нал . Элементы 14, 15 и 16 инве тируют и логически переключают сигна лы элементов 12 и 13. Управление лог ческим переключением производится сигналами на входах элементов 14 и 15, подключенных к выходам цифрового дифференциатора 5. На первой ступени скорости задающей оси на входе элемента 14 сигнал , а на входе элемента 15 - О. На выходе элемен та 16 вырабатывается инвертированный сигнал элемента 12,зависимость которого от угла рассогласования показана на диаграмме 17 фиг.3.На второй ступени скорости задающей, оси на входе элемента 14 сигнал О-, а на входе элемента 15 сигнал . На выходе элемента 16 вырабатывается инвертированный сигнал элемента 13, зависимость которого от угла рассогласования имеет вид, показанный на .диаграмме 18 фиг. 3. Зависимость управляющего сигнала от угла рассогласования цифровой сле дящей системы, схема которой показана на фиг. 1, изменяется ступенчато, соответственно скорости вращения задающэй оси. Это позволяет Для каждой ступени скорости вращения подобрать такую зависимость, которая обеспечивает минимальное время отработки заданного угла рассогласования Требующиеся зависимости реализуются сортаетствующим зыполнением преобразователя кода цифрового дифференциатора и логического переключающего устройства. В рассматриваемой системе повышение быстродействия - уменьшение врем ни отработки заданного рассогласования достигается без увеличения максимальной скорости вращения, за счет усовершенсгБованиЯ: шравляющей части системы. Так как мощность двю ателя определяется произведением нагрузочного момента на скорость, то не требуется увеличивать мощность двигателя. Таким образом, при заданном времени отработки рассогласования применение рассматриваемой системы позволяет использовать двигатель, а также усилитель и передаточный механизм на меньшую мощность, чем в, известной системе. Вместо, резерсивной иззестной с.истемы южет быть использована заявпенна нереверсивная система, удовггетворяющая требованиям к быстродействию, в которой с тдественно проще усилитель и управление двигателем, так как в нереверсивной системе рассматриваемого типа время отработки уменьшается также и в режиме торможения . Формула изобретения 1. Цифровая следящая система, содержащая последовательно соединенные преобразовательно-усилительное устройство, исполнительный двигатель, преобразователь .угол-код и дискретное сравнивающее устройство, второй вход которого подключен к преобразователю угол-кода выходы К соответствукхци.м входам преобразователя кода г и цифровой дифферен.циаторг о т-, л и ч а ю щ а я с я тем, что, с целью повышения быстродействия системы, в нее вве.дено лог.ическое переключакхцее устройство, сигнальные входы которого подключены к выходам преобразователя кода, управляющие входы соединены с выхода7 5и цифрового дифференциатора, а выход подключен ко входу преобразовательно-усилительного устройства, 2 Система по п.1, о т л и ч а ющ а я с я тем, что преобразователь кода содержит три элемента И-НЕ входы первого элемента И-НЕ подключены к инверсн. входам разрядов преобразователя кода, кроме старшего, выход первого элемента И-НЕ подключен к входам второго и третьего элементов, вторые входы которых подключены к инверсному входу старшего разряда преобразователя кода, третий вход третьего элемента И-НЕ соединен с инверсным входом разряда, предшествующего старшему, преобразователя кода, выходы второго и третьего элементов i-HE подключены к выходам преобразователя кода. Источники информации, принятые во внимание при экспертизе 1.Следящие приводы.Под ред. Чемоданов а 5. K.f 1975, 2,Авторское свидетельство СССР № 442458, кл, G 05 В 13/02, 15-05.72.
г-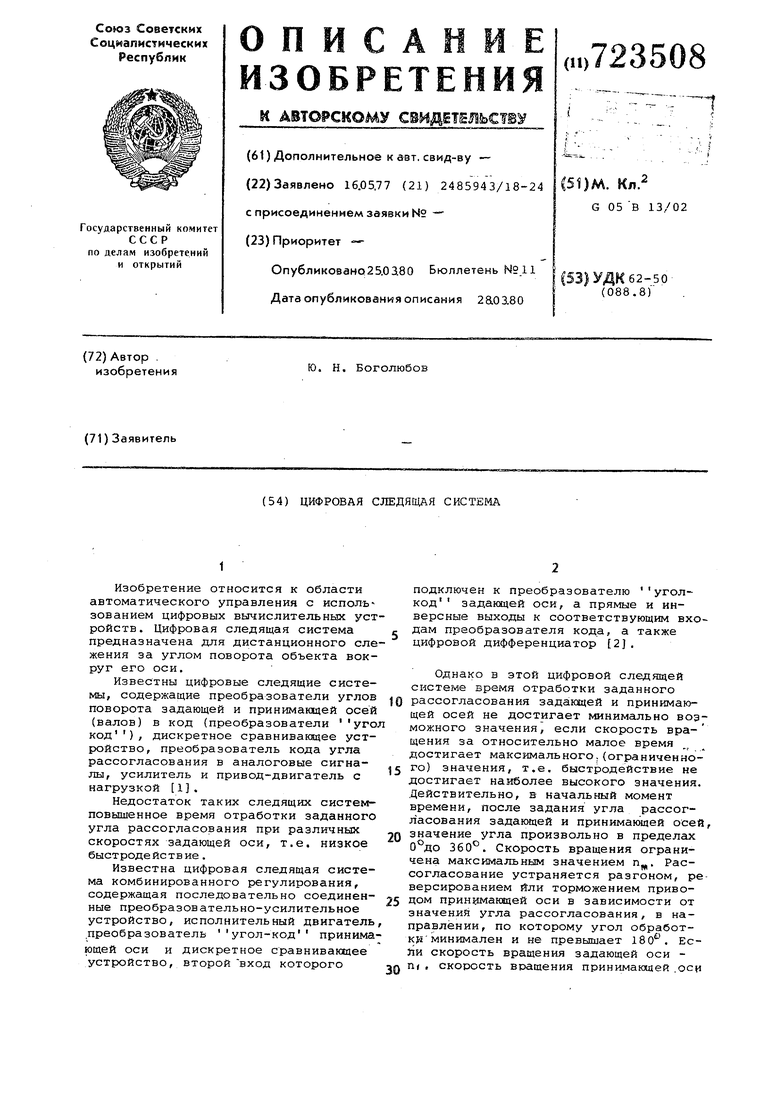
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Цифровая следящая система | 1978 |
|
SU769486A1 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Устройство задания и передачи кодов для согласованного управления | 1987 |
|
SU1603342A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ПРЕОБРАЗОВАТЕЛЬ КОД — УГОЛ | 1973 |
|
SU409272A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |